TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024150873
公報種別
公開特許公報(A)
公開日
2024-10-24
出願番号
2023063890
出願日
2023-04-11
発明の名称
環境認識装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
G06T
7/215 20170101AFI20241017BHJP(計算;計数)
要約
【課題】過大な装置構成を必要とせずに、移動体検出を高精度に行うこと。
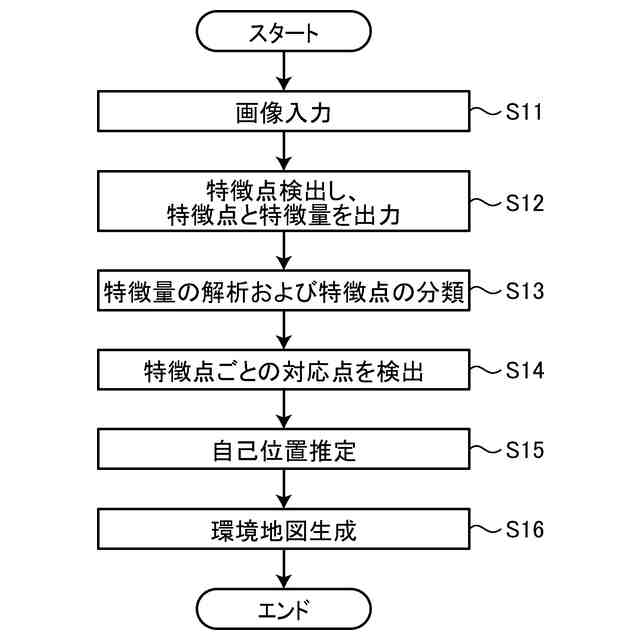
【解決手段】実施形態の環境認識装置は、撮像部によって撮像された画像を入力し、入力された画像の特徴点と、前記特徴点の特徴量と、を出力する学習済みモデルで構成される特徴点検出部と、前記特徴点検出部から出力される前記特徴量を解析し、前記特徴量の解析結果に基づいて、前記画像における特徴点を、移動体の特徴点からなる移動体領域と、非移動体の特徴点からなる非移動体領域とに分類する解析部と、前記非移動体領域の特徴点ごとの対応点を検出し、前記対応点に基づいて自己位置を推定し、環境地図を生成する環境認識部と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
撮像部によって撮像された画像を入力し、入力された画像の特徴点と、前記特徴点の特徴量と、を出力する学習済みモデルで構成される特徴点検出部と、
前記特徴点検出部から出力される前記特徴量を解析し、前記特徴量の解析結果に基づいて、前記画像における特徴点を、移動体の特徴点からなる移動体領域と、非移動体の特徴点からなる非移動体領域とに分類する解析部と、
前記非移動体領域の特徴点ごとの対応点を検出し、前記対応点に基づいて自己位置を推定し、環境地図を生成する環境認識部と、
を備える環境認識装置。
続きを表示(約 480 文字)
【請求項2】
前記解析部は、前記特徴量を、予め定められた前記移動体の参照特徴量と比較し、前記特徴量と前記参照特徴量との距離が第1の閾値以下である場合に、前記特徴量を有する前記特徴点を前記移動体領域に分類し、前記距離が前記第1の閾値より大きい場合に、前記特徴量を有する前記特徴点を前記非移動体領域に分類する、
請求項1に記載の環境認識装置。
【請求項3】
前記解析部は、前記特徴点の特徴量を入力して前記特徴量を有する前記特徴点を前記移動体の特徴点と前記非移動体の特徴点とに分類する第2の学習済みモデルを用いて、前記特徴量を有する前記画像における特徴点を、前記移動体領域と前記非移動体領域とに分類する、
請求項1に記載の環境認識装置。
【請求項4】
前記解析部は、前記特徴量に基づいて、前記画像における特徴点を、前記移動体である雲の特徴点からなる雲領域と、前記移動体である移動物体の特徴点からなる移動物体領域と、前記非移動体領域とに分類する、
請求項1から3のいずれか1項に記載の環境認識装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、環境認識装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、撮像装置から得られる映像データ等の画像から現在の自己位置を三次元で推定して環境地図を生成する技術として、Visual-SLAM(Simultaneous Localization and Mapping:以下、「VSLAM」と称する。)技術が知られている。近年は、VSLAMの分野において、人工知能を利用した特徴点検出器や対応点検出器が開発されている(例えば、特許文献1参照)。
【0003】
VSLAM技術では、周辺の環境が静止していることを前提として自己位置推定を行っている。このため、車両、人等の移動体が存在する場合、自己位置推定の精度に悪影響を及ぼす恐れがある。
【0004】
例えば、セグメンテーションモデル等の人工知能を用いた手法によって、画素ごとに移動体か非移動体かを分類する技術があり、この技術を用いることで、特徴点が移動体から検出されたものか否かを判断することは可能である。
【0005】
また、車両や人間等の移動体のテンプレートを予め準備しておき、撮像した周囲の画像から、テンプレートマッチングにより、車両や人間等の移動体を判断して、移動体を除去して環境地図を生成する技術も従来から知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0006】
中国特許出願公開第111344716号明細書
特開2020-152234号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、セグメンテーションモデル等の人工知能の手法を用いた移動体の判断の従来技術では、画素ごとに判断しなければならず処理負荷が高くなるため、装置に多くのハードウェアリソースが必要となる。また、特許文献1の技術では、予め多数の移動体のテンプレートを準備しておく必要があり、記憶容量が過大となる。また、この特許文献1の技術では、テンプレートマッチングの手法を用いているため、テンプレートのない移動体については検出が困難となり、検出精度が低下する可能性がある。
【0008】
実施形態の課題の一つは、過大な装置構成を必要とせずに、移動体検出を高速かつ高精度に行うことができる環境認識装置を提供することである。
【課題を解決するための手段】
【0009】
実施形態の環境認識装置は、撮像部によって撮像された画像を入力し、入力された画像の特徴点と、前記特徴点の特徴量と、を出力する学習済みモデルで構成される特徴点検出部と、前記特徴点検出部から出力される前記特徴量を解析し、前記特徴量の解析結果に基づいて、前記画像における特徴点を、移動体の特徴点からなる移動体領域と、非移動体の特徴点からなる非移動体領域とに分類する解析部と、前記非移動体領域の特徴点ごとの対応点を検出し、前記対応点に基づいて自己位置を推定し、環境地図を生成する環境認識部と、を備える。当該構成により、一例として、画素ごとの移動体の判断やテンプレートを用いる必要がなくなるので、過大な装置構成を必要とせずに、移動体検出を高速かつ高精度に行うことができる。
【0010】
また、実施形態の環境認識装置において、前記解析部は、前記特徴量を、予め定められた前記移動体の参照特徴量と比較し、前記特徴量と前記参照特徴量との距離が第1の閾値以下である場合に、前記特徴量を有する前記特徴点を前記移動体領域に分類し、前記距離が前記第1の閾値より大きい場合に、前記特徴量を有する前記特徴点を前記非移動体領域に分類する。当該構成により、一例として、特徴点の特徴量と移動体の参照特徴量と比較して分類しているので、画素ごとの移動体の判断やテンプレートを用いる必要がなくなり、過大な装置構成を必要とせずに、移動体検出をより高速かつより高精度に行うことができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
駆動装置
29日前
株式会社アイシン
気液分離器
11日前
株式会社アイシン
GM冷凍機
12日前
株式会社アイシン
車載充電装置
29日前
株式会社アイシン
物体検出装置
4日前
株式会社アイシン
リモコン装置
25日前
株式会社アイシン
車載充電装置
12日前
株式会社アイシン
車載充電装置
12日前
株式会社アイシン
押圧プレート
25日前
株式会社アイシン
防犯システム
25日前
株式会社アイシン
運転支援装置
19日前
株式会社アイシン
マニホールド
11日前
株式会社アイシン
検知システム
19日前
株式会社アイシン
直線移動機構
11日前
株式会社アイシン
運転支援装置
19日前
株式会社アイシン
車両駆動装置
5日前
株式会社アイシン
発電管理装置
5日前
株式会社アイシン
ドア支持装置
19日前
株式会社アイシン
発電管理装置
5日前
株式会社アイシン
マニホールド
25日前
株式会社アイシン
マニホールド
5日前
株式会社アイシン
駐車支援装置
5日前
株式会社アイシン
車載充電装置
29日前
株式会社アイシン
車載充電装置
4日前
株式会社アイシン
車載充電装置
4日前
株式会社アイシン
ロータリバルブ
25日前
株式会社アイシン
冷却モジュール
25日前
株式会社アイシン
回路モジュール
13日前
株式会社アイシン
車両用駆動装置
25日前
株式会社アイシン
冷却モジュール
25日前
株式会社アイシン
熱交換システム
12日前
株式会社アイシン
赤外線分光装置
25日前
株式会社アイシン
冷却モジュール
25日前
株式会社アイシン
配送支援システム
19日前
株式会社アイシン
ステアリング装置
25日前
株式会社アイシン
電子部品ユニット
12日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ