TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024145774
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058266
出願日
2023-03-31
発明の名称
作業機械の遠隔操作システム及び作業機械の遠隔操作方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
H04Q
9/00 20060101AFI20241004BHJP(電気通信技術)
要約
【課題】遠隔操作装置と遠隔操作される作業機械との組み合わせを決定すること。
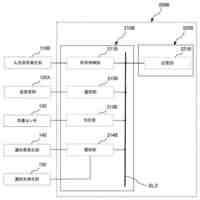
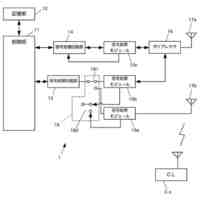
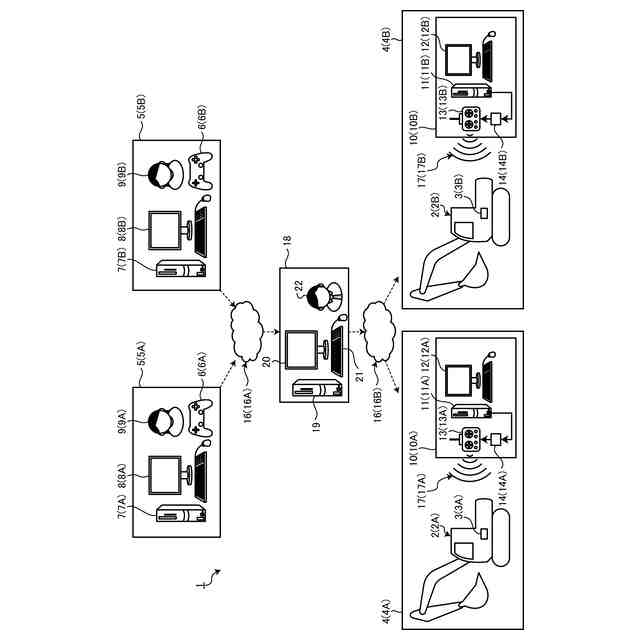
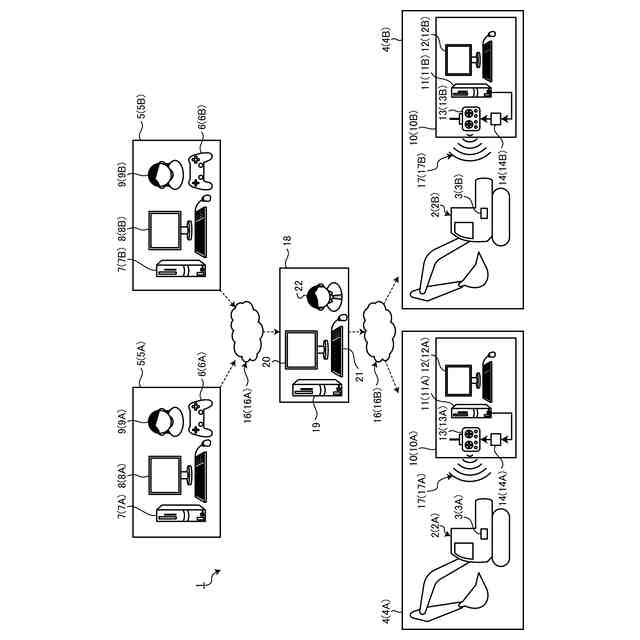
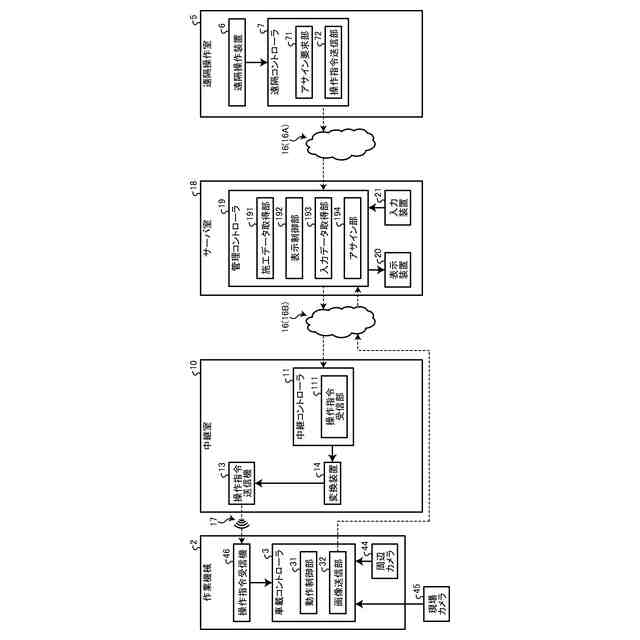
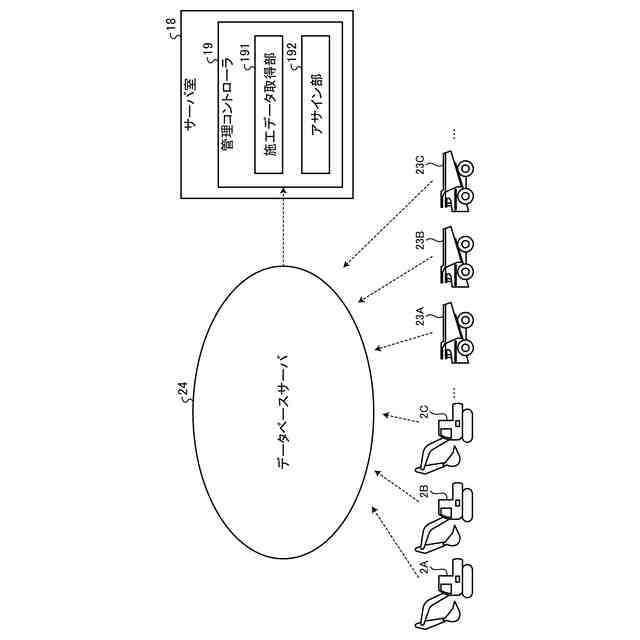
【解決手段】作業機械の遠隔操作システムは、遠隔操作装置に対応付けられ、遠隔操作装置からの操作信号に基づいて、操作指令を送信する遠隔コントローラと、作業機械に対応付けられ、操作指令を受信する中継コントローラと、中継コントローラにより中継された操作指令を作業機械に送信する操作指令送信機と、特定の遠隔コントローラと特定の中継コントローラとの通信を接続する管理コントローラと、を備える。
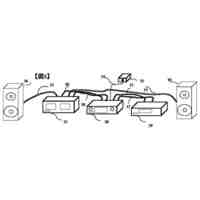
【選択図】図1
特許請求の範囲
【請求項1】
遠隔操作装置に対応付けられ、前記遠隔操作装置からの操作信号に基づいて、操作指令を送信する遠隔コントローラと、
作業機械に対応付けられ、前記操作指令を受信する中継コントローラと、
前記中継コントローラにより中継された操作指令を作業機械に送信する操作指令送信機と、
特定の前記遠隔コントローラと特定の前記中継コントローラとの通信を接続する管理コントローラと、を備える、
作業機械の遠隔操作システム。
続きを表示(約 1,200 文字)
【請求項2】
前記遠隔操作装置及び前記遠隔コントローラは、作業機械が稼働する作業現場の遠隔地に設置された遠隔操作室に配置され、
前記中継コントローラ及び前記操作指令送信機は、前記作業現場に設置された中継室に配置される、
請求項1に記載の作業機械の遠隔操作システム。
【請求項3】
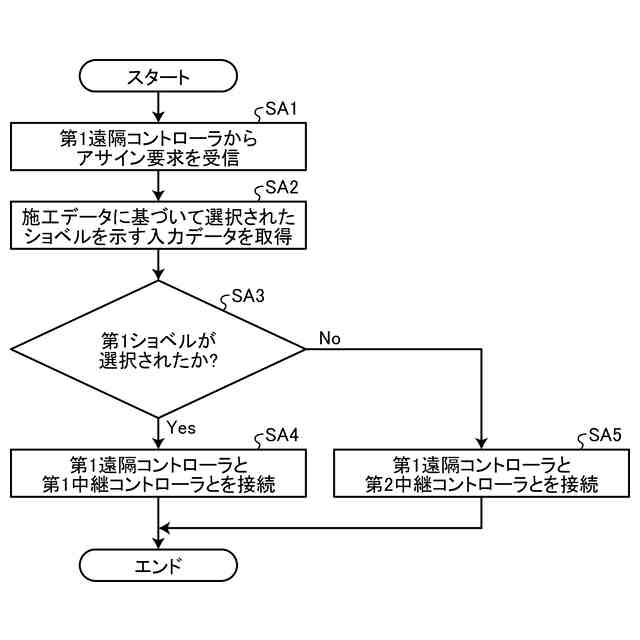
前記管理コントローラは、作業機械が稼働する作業現場の作業状況を示す施工データに基づいて、前記通信を接続する、
請求項1に記載の作業機械の遠隔操作システム。
【請求項4】
前記管理コントローラは、前記施工データに基づいて、複数の中継コントローラから前記遠隔コントローラとの通信を接続する中継コントローラを特定する、
請求項3に記載の作業機械の遠隔操作システム。
【請求項5】
前記管理コントローラは、前記施工データに基づいて操作された入力装置からの入力データに基づいて、前記通信を接続する、
請求項4に記載の作業機械の遠隔操作システム。
【請求項6】
前記管理コントローラは、管理者の任意の設定に基づいて、前記中継コントローラと前記遠隔コントローラとの通信を接続する、
請求項1に記載の作業機械の遠隔操作システム。
【請求項7】
前記作業現場を撮像するカメラを備え、
前記管理コントローラは、前記カメラにより撮像された前記作業現場の画像を表示装置に表示させ、
前記施工データは、前記作業現場の画像を含む、
請求項5に記載の作業機械の遠隔操作システム。
【請求項8】
前記施工データは、複数の作業機械のそれぞれの作業開始予定時刻を含み、
前記管理コントローラは、前記作業開始予定時刻に基づいて、前記通信を接続する、
請求項7に記載の作業機械の遠隔操作システム。
【請求項9】
前記遠隔コントローラから送信される操作指令は、第1通信方式の第1操作指令を含み、
前記操作指令送信機から送信される操作指令は、第2通信方式の第2操作指令を含む、
請求項1に記載の作業機械の遠隔操作システム。
【請求項10】
管理コントローラが、遠隔操作装置に対応付けられた特定の遠隔コントローラと、作業機械に対応付けられた特定の中継コントローラとの通信を接続し、
前記遠隔コントローラが、前記遠隔操作装置からの操作信号に基づいて、操作指令を送信し、
前記中継コントローラが、前記遠隔コントローラから送信された操作指令を受信し、
操作指令送信機が、中継コントローラにより中継された操作指令を作業機械に送信し、
前記作業機械が、前記操作指令送信機から送信された操作指令に基づいて動作する、
作業機械の遠隔操作方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の遠隔操作システム及び作業機械の遠隔操作方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
作業機械の遠隔操作システムに係る技術分野において、特許文献1に開示されているような作業支援システムが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2022-154873号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
遠隔操作システムにおいて、遠隔操作装置と作業機械とは、通信システムを介して通信する。遠隔操作装置が複数存在する場合、又は作業機械が複数存在する場合、遠隔操作装置と遠隔操作される作業機械との組み合わせを決定する必要がある。
【0005】
本開示は、遠隔操作装置と遠隔操作される作業機械との組み合わせを決定することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、遠隔操作装置に対応付けられ、遠隔操作装置からの操作信号に基づいて、操作指令を送信する遠隔コントローラと、作業機械に対応付けられ、操作指令を受信する中継コントローラと、中継コントローラにより中継された操作指令を作業機械に送信する操作指令送信機と、特定の遠隔コントローラと特定の中継コントローラとの通信を接続する管理コントローラと、を備える、作業機械の遠隔操作システムが提供される。
【発明の効果】
【0007】
本開示によれば、遠隔操作装置と遠隔操作される作業機械との組み合わせを決定することができる。
【図面の簡単な説明】
【0008】
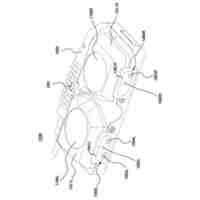
図1は、第1実施形態に係る作業機械の遠隔操作システムを模式的に示す図である。
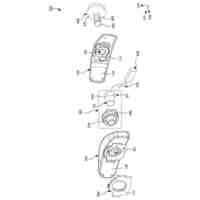
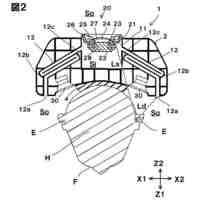
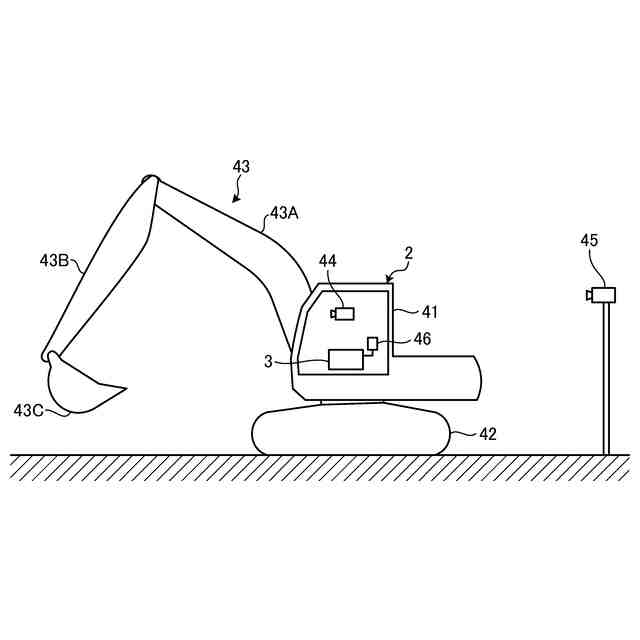
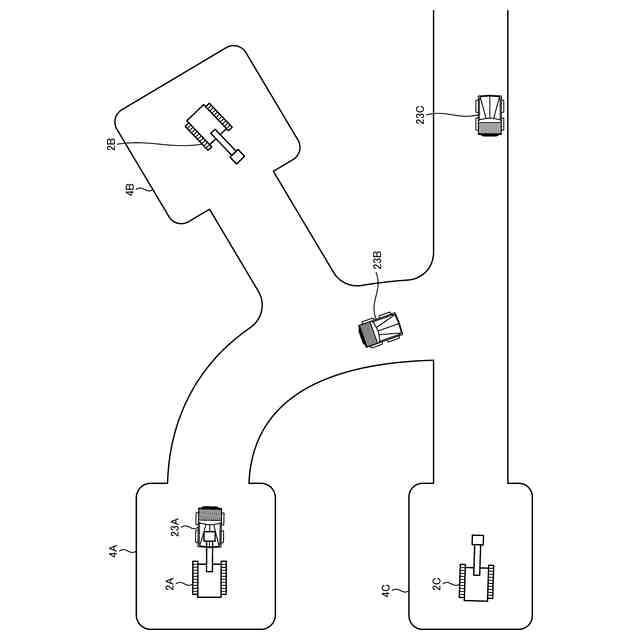
図2は、第1実施形態に係る作業機械を模式的に示す図である。
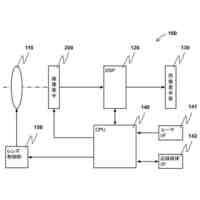
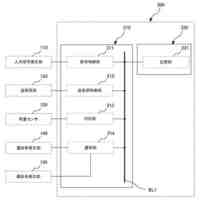
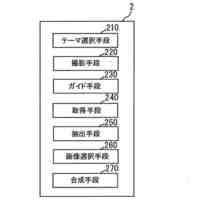
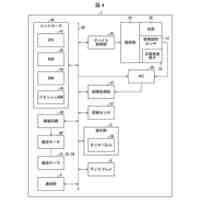
図3は、第1実施形態に係る遠隔操作システムを示すブロック図である。
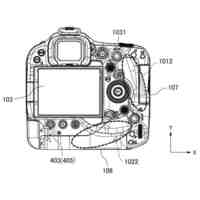
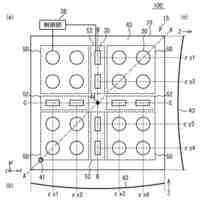
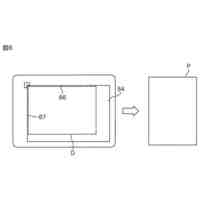
図4は、第1実施形態に係る表示装置の表示例を示す図である。
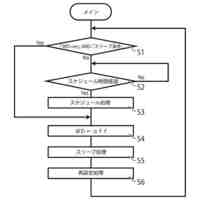
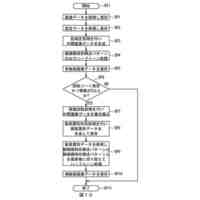
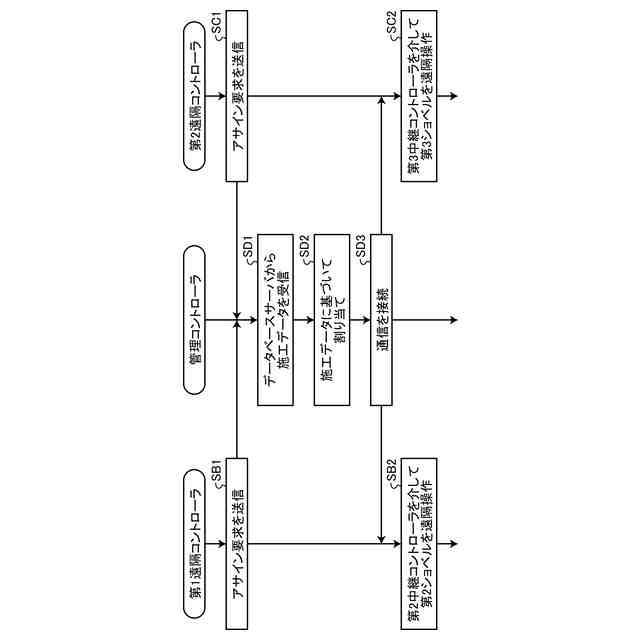
図5は、第1実施形態に係る遠隔操作方法を示すフローチャートである。
図6は、第2実施形態に係る作業機械の遠隔操作システムを模式的に示す図である。
図7は、第2実施形態に係る作業機械及びダンプトラックを模式的に示す図である。
図8は、第2実施形態に係る遠隔操作方法を示すフローチャートである。
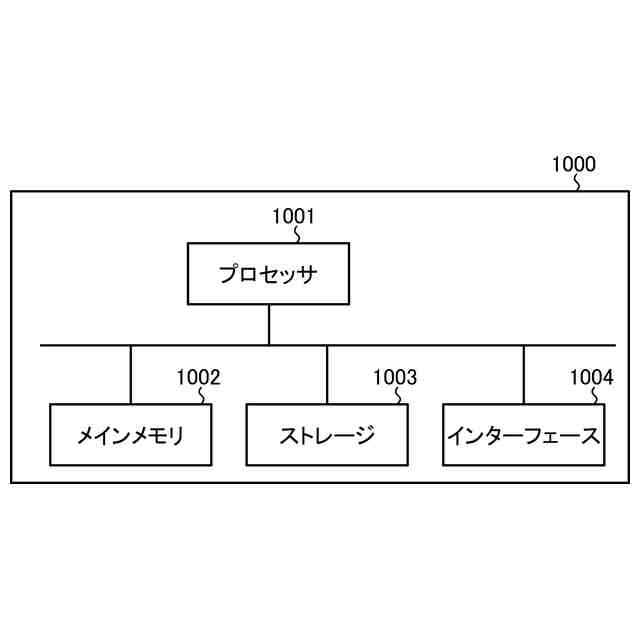
図9は、実施形態に係るコンピュータシステムを示すブロック図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[第1実施形態]
第1実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ヘッドホン
1か月前
個人
仮想アース
1日前
個人
車両の制御装置
20日前
株式会社シグマ
撮像装置
1か月前
個人
スピーカーシステム
1か月前
日本精機株式会社
遠隔操作装置
2か月前
キヤノン株式会社
撮像装置
20日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
表示装置
1か月前
パイオニア株式会社
音響装置
24日前
個人
配信用音源制作システム
1か月前
個人
平面映像の回転による立体映像
13日前
太陽誘電株式会社
超音波装置
9日前
パイオニア株式会社
音響装置
24日前
パイオニア株式会社
音響装置
24日前
ブラザー工業株式会社
印刷装置
17日前
キヤノン株式会社
画像読取装置
9日前
大日本印刷株式会社
写真撮影装置
27日前
沖電気工業株式会社
画像形成装置
27日前
ブラザー工業株式会社
利用管理システム
1日前
アイホン株式会社
インターホン機器
1か月前
アイホン株式会社
インターホン機器
2か月前
アイホン株式会社
インターホン機器
2か月前
アイホン株式会社
インターホン機器
2か月前
アイホン株式会社
インターホン機器
1か月前
ブラザー工業株式会社
画像読取装置
1か月前
TOA株式会社
IP放送の停止、切替制御
6日前
株式会社小糸製作所
音発生ユニット
13日前
株式会社バッファロー
無線通信装置
20日前
株式会社JVCケンウッド
管理装置
1か月前
アイホン株式会社
インターホン機器
14日前
アルプスアルパイン株式会社
音響装置
1か月前
株式会社ニコン
撮像素子
1か月前
積水ポリマテック株式会社
軟質触感体
1か月前
沖電気工業株式会社
装置
1か月前
日本精機株式会社
ヘッドアップディスプレイ
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ