TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024144848
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023056993
出願日
2023-03-31
発明の名称
探傷装置の制御装置、および品質管理支援方法
出願人
三菱重工業株式会社
代理人
個人
,
個人
主分類
G01N
29/265 20060101AFI20241004BHJP(測定;試験)
要約
【課題】プローブを用いた検査を高精度に行うことができるようにした探傷装置の制御装置を提供する。
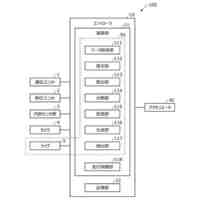
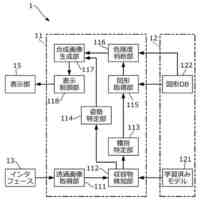
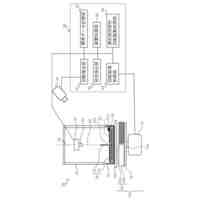
【解決手段】探傷装置の制御装置は、プローブと、プローブを検査対象に押し当てるロボットアームと、を備える探傷装置を制御対象とする。制御装置は、なぞり処理、学習処理、および検査処理を実行する。なぞり処理は、ロボットアームを操作することによって、プローブを検査対象に接触させつつ検査対象に沿って移動させる処理である。学習処理は、なぞり処理によって移動する都度のプローブの位置に応じて検査対象の形状を学習する処理である。検査処理は、検査対象に接触させたプローブを学習処理によって学習された検査対象の形状に従って変位させつつ発信した超音波の反射波を用いて検査対象を検査する処理である。
【選択図】図1
特許請求の範囲
【請求項1】
プローブと、プローブを検査対象に押し当てるロボットアームと、を備える探傷装置を制御対象とし、
なぞり処理、学習処理、および検査処理を実行するように構成され、
前記なぞり処理は、前記ロボットアームを操作することによって、前記プローブを前記検査対象に接触させつつ前記検査対象に沿って移動させる処理であり、
前記学習処理は、前記なぞり処理によって移動する都度の前記プローブの位置に応じて前記検査対象の形状を学習する処理であり、
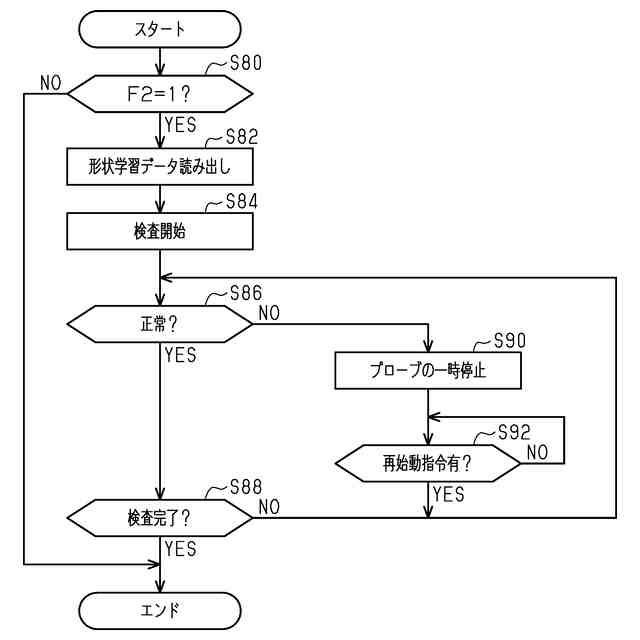
前記検査処理は、前記検査対象に接触させた前記プローブを前記学習処理によって学習された前記検査対象の形状に従って変位させつつ発信した超音波の反射波を用いて前記検査対象を検査する処理である探傷装置の制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記学習処理は、前記検査対象の形状を学習することによって形状学習データを生成する処理であり、
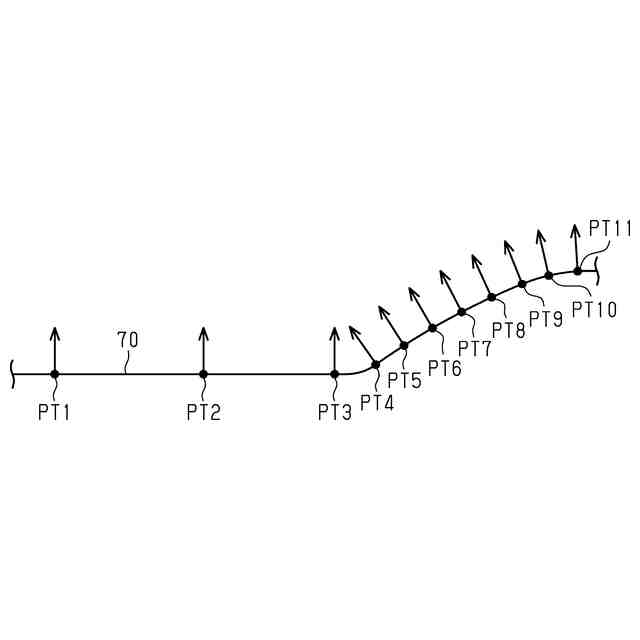
前記形状学習データは、前記検査対象の複数の位置のそれぞれに付与された教示点に関する前記検査対象の表面の座標と前記表面に直交する方向とを示すデータである請求項1記載の探傷装置の制御装置。
【請求項3】
前記学習処理は、前記プローブが通過した経路における前記検査対象の曲率が大きい場合の隣接する前記教示点同士の間隔を前記曲率が小さい場合の前記間隔以下とする条件で前記曲率に応じて隣接する前記間隔を変更する間隔可変処理を含む請求項2記載の探傷装置の制御装置。
【請求項4】
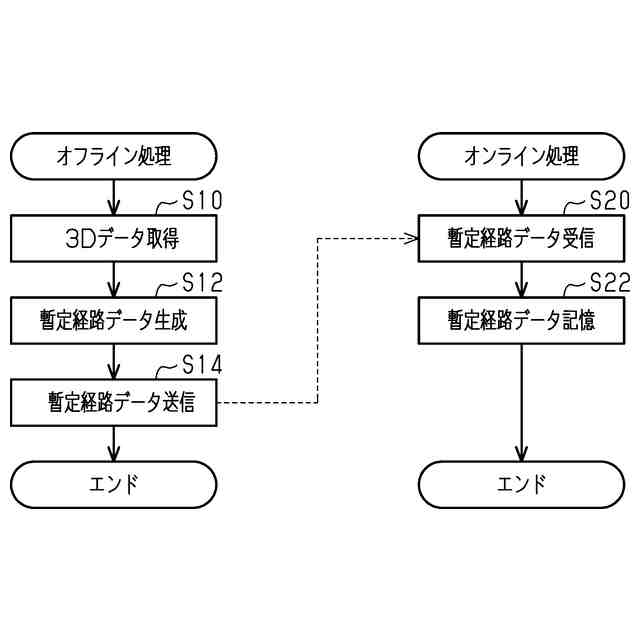
前記なぞり処理は、暫定経路データに従って、前記プローブを前記検査対象に接触させつつ前記検査対象に沿って変位させる処理であり、
前記暫定経路データは、所定の座標系において前記プローブを前記検査対象に接触させつつ前記検査対象に沿って移動させる経路を定めるデータであり、
3次元データ取得処理、調整処理を実行するように構成され、
前記3次元データ取得処理は、前記検査対象の画像に応じた前記検査対象に関する位置および角度の情報を示すデータを取得する処理であり、
前記調整処理は、前記位置および角度の情報を入力として、前記所定の座標系を前記検査対象に整合させる整合処理を含み、
前記なぞり処理の入力となる前記暫定経路データは、前記調整処理によって前記所定の座標系が前記検査対象に整合された前記暫定経路データである請求項1記載の探傷装置の制御装置。
【請求項5】
プローブと、プローブを検査対象に押し当てるロボットアームと、を備える探傷装置を制御対象とし、
変位処理、3次元データ取得処理、調整処理を実行するように構成され、
前記変位処理は、経路データに従って、前記プローブを前記検査対象に接触させつつ前記検査対象に沿って変位させる処理であり、
前記経路データは、所定の座標系において前記プローブを前記検査対象に接触させつつ前記検査対象に沿って変位させる経路を定めるデータであり、
前記3次元データ取得処理は、前記検査対象の画像に応じた前記検査対象に関する位置および角度の情報を示すデータを取得する処理であり、
前記調整処理は、前記位置および角度の情報を入力として、前記所定の座標系を前記検査対象に整合させる整合処理を含み、
前記変位処理の入力となる前記経路データは、前記調整処理によって前記所定の座標系が前記検査対象に整合された前記経路データである探傷装置の制御装置。
【請求項6】
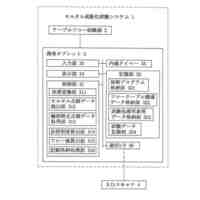
前記3次元データ取得処理は、前記検査対象の複数個の所定のオブジェクトに関する位置および角度を示すデータを取得する処理であり、
前記整合処理は、前記複数個の所定のオブジェクトに関する前記位置および角度の情報を入力として、前記所定の座標系を前記検査対象に整合させる処理である請求項4または5記載の探傷装置の制御装置。
【請求項7】
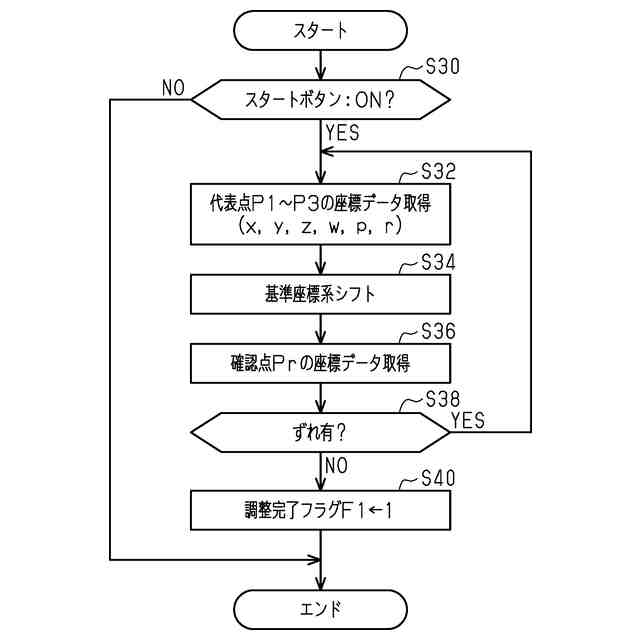
前記整合処理は、合成用代表点と所定の座標系の原点とを結ぶベクトルだけ合成点を変位させた点へと前記所定の座標系の原点をシフトさせる処理を含み、
前記合成用代表点は、前記複数個の所定のオブジェクトのうちの1つに対応した点であり、
前記合成点は、前記複数個の所定のオブジェクトに関する前記位置および角度の情報を前記合成用代表点に反映させることによって得られる点である請求項6記載の探傷装置の制御装置。
【請求項8】
前記調整処理は、確認用取得処理、判定処理、およびリトライ処理を含み、
前記確認用取得処理は、前記検査対象の確認用オブジェクトの画像に応じた前記確認用オブジェクトに関する位置および角度の情報を取得する処理であり、
前記判定処理は、前記確認用オブジェクトに関する位置および角度と、前記整合処理によって整合された前記所定の座標系とが整合するか否かを判定する処理であり、
前記リトライ処理は、前記判定処理によって整合しないと判定される場合、前記3次元データ取得処理、および前記整合処理を再度実行させる処理である請求項4記載の探傷装置の制御装置。
【請求項9】
請求項2記載の探傷装置の制御装置が実行する前記学習処理によって生成される複数の前記検査対象に関する前記形状学習データを記憶する工程と、
前記記憶した複数の前記検査対象に関する前記形状学習データを、前記検査対象の製造工程にフィードバックする工程と、を有する品質管理支援方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、探傷装置の制御装置、および品質管理支援方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
たとえば下記特許文献1には、超音波センサを把持したロボットアームが記載されている。
【先行技術文献】
【特許文献】
【0003】
特許第5495562号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、超音波センサ(プローブ)を用いた検査を精度良く行う上では、検査対象に適切にプローブを接触させつつプローブを変位させることが望ましい。しかし、検査対象の正確な位置を把握できない場合には、検査対象に適切にプローブを接触させつつプローブを変位させることが難しい。
【課題を解決するための手段】
【0005】
以下、上記課題を解決するための手段およびその作用効果について記載する。
1.プローブと、プローブを検査対象に押し当てるロボットアームと、を備える探傷装置を制御対象とし、なぞり処理、学習処理、および検査処理を実行するように構成され、前記なぞり処理は、前記ロボットアームを操作することによって、前記プローブを前記検査対象に接触させつつ前記検査対象に沿って移動させる処理であり、前記学習処理は、前記なぞり処理によって移動する都度の前記プローブの位置に応じて前記検査対象の形状を学習する処理であり、前記検査処理は、前記検査対象に接触させた前記プローブを前記学習処理によって学習された前記検査対象の形状に従って変位させつつ発信した超音波の反射波を用いて前記検査対象を検査する処理である探傷装置の制御装置である。
【0006】
上記構成では、なぞり処理によって移動する都度のプローブの位置に応じて検査対象の形状を学習する。そして、学習した検査対象の形状に従ってプローブを変位させつつプローブから発信した超音波の反射波を用いて検査を行う。これにより、検査対象の公差に起因して検査対象の仕様と検査対象の実際の形状との間に乖離がある場合であっても、検査対象の実際の形状を高精度に把握しつつプローブを検査対象に接触させることができる。そのため、プローブを用いた検査を高精度に行うことができる。
【0007】
2.前記学習処理は、前記検査対象の形状を学習することによって形状学習データを生成する処理であり、前記形状学習データは、前記検査対象の複数の位置のそれぞれに付与された教示点に関する前記検査対象の表面の座標と前記表面に直交する方向とを示すデータである上記1記載の探傷装置の制御装置である。
【0008】
上記構成では、形状学習データを用いることにより、検査対象の位置毎に、検査対象の表面に直交する方向を把握できる。そのため、検査対象の位置毎に、プローブをどの方向から押し付けるべきかを容易に把握できる。
【0009】
3.前記学習処理は、前記プローブが通過した経路における前記検査対象の曲率が大きい場合の隣接する前記教示点同士の間隔を前記曲率が小さい場合の前記間隔以下とする条件で前記曲率に応じて隣接する前記間隔を変更する間隔可変処理を含む上記2記載の探傷装置の制御装置である。
【0010】
検査対象の曲率が大きい場合には小さい場合と比較して、検査対象の位置毎で検査対象の表面に直交する方向が大きく変化する。そのため、曲率が小さい時に適切な教示点の間隔では、曲率が大きい場合に、プローブをどの方向から検査対象に押し付けるかの情報が不足するおそれがある。そこで、上記構成では、間隔可変処理を実行する。これにより、プローブをどの方向から検査対象に押し付けるかの情報を十分に得るうえで適切な数の教示点を確保しつつも、教示点の数が過度の大きくなることを抑制できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
6日前
日本精機株式会社
位置検出装置
2日前
東レ株式会社
シート状物の検査方法
今日
株式会社ハシマ
検針機
5日前
東ソー株式会社
自動分析装置及び方法
2日前
富士電機株式会社
エンコーダ
今日
TDK株式会社
温度センサ
今日
株式会社ヨコオ
シートコンタクタ
2日前
本田技研工業株式会社
物体検出装置
5日前
本田技研工業株式会社
物体検出装置
5日前
ダイハツ工業株式会社
凹部の深さ測定方法
5日前
スタンレー電気株式会社
車両前方視認装置
5日前
スタンレー電気株式会社
車両前方視認装置
5日前
矢崎総業株式会社
電流センサ
6日前
JRCモビリティ株式会社
充電用温度判定回路
2日前
セイコーエプソン株式会社
干渉計
2日前
TDK株式会社
センサ
今日
内山工業株式会社
分析装置用部材
1日前
株式会社JVCケンウッド
撮像装置及び測距方法
5日前
日本信号株式会社
表示装置
今日
日東建設株式会社
ボルト・ナットの健全性検査装置
5日前
浜松ホトニクス株式会社
分光計測装置
6日前
株式会社SUBARU
蓄電池の状態センサ装置
2日前
セイコーエプソン株式会社
電子デバイス
6日前
株式会社キーエンス
レベル計
5日前
日本製鉄株式会社
回転機械の異常診断支援方法及び装置
今日
株式会社キーエンス
レベル計
5日前
個人
位置決め具及び位置決め具付きコンベックスルール
5日前
株式会社キーエンス
レベル計
5日前
株式会社キーエンス
レベル計
5日前
倉敷化工株式会社
動特性測定装置
5日前
株式会社キーエンス
レベル計
5日前
住友電気工業株式会社
光モジュール
5日前
株式会社ケー・エフ・シー
モルタル流動性試験システム
5日前
国立大学法人 東京大学
粘性の測定装置及び方法
1日前
大成建設株式会社
地震動解析システム
今日
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ