TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024143062
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023055543
出願日
2023-03-30
発明の名称
車両制御装置、車両制御用コンピュータプログラム及び車両制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/00 20060101AFI20241003BHJP(車両一般)
要約
【課題】合流地形において、隣接車両が自車両と前方車両との間に安全に移動できるように、自車両と前方車両との間に又は自車両と隣接車両との間に、適切な車間距離を設定できる車両制御装置を提供する。
【解決手段】車両制御装置は、前方車両が有り且つ隣接車両がある場合、自車両に対する前方車両の距離と、自車両に対する隣接車両の距離、自車両の速度とに基づいて、合流地形において隣接車両が自車両の前方の走行車線へ移動するか否かを推定する推定部と、隣接車両が自車両の前方の走行車線へ移動すると推定された場合、自車両に対する前方車両の距離と、自車両の速度とに基づいて、走行車線上における前方車両と自車両との間の第1車間距離を設定するか、又は、自車両の速度に基づいて、走行車線上における隣接車両と自車両との間の第2車間距離を設定する設定部とを有する。
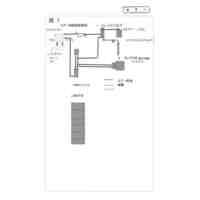
【選択図】図2
特許請求の範囲
【請求項1】
地図情報に基づいて、自車両の現在位置から進行方向に向かった第1の所定の範囲内に、前記自車両が走行する走行車線と隣接する隣接車線が前記走行車線と合流することにより消滅する合流地形があるか否かを判定する第1判定部と、
前記第1判定部によって前記合流地形があると判定された場合、前記自車両の周辺環境情報に基づいて、前記自車両から第2の所定の範囲内に、前記自車両の前方の前記走行車線を走行する前方車両があるか否かを判定し、且つ、前記自車両から第3の所定の範囲内に、前記隣接車線を走行する隣接車両があるか否かを判定する第2判定部と、
前記第2判定部によって前記前方車両が有り且つ前記隣接車両があると判定された場合、前記自車両に対する前記前方車両の距離と、前記自車両に対する前記隣接車両の距離と、前記自車両の速度とに基づいて、前記合流地形において前記隣接車両が前記自車両の前方の前記走行車線へ移動するか否かを推定する推定部と、
前記推定部によって前記隣接車両が前記自車両の前方の前記走行車線へ移動すると推定された場合、前記自車両に対する前記前方車両の距離と、前記自車両の速度とに基づいて、前記走行車線上における前記前方車両と前記自車両との間の第1車間距離を設定するか、又は、前記自車両の速度に基づいて、前記走行車線上における前記隣接車両と前記自車両との間の第2車間距離を設定する設定部と、
を有する、ことを特徴とする車両制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記設定部は、前記自車両に対する前記前方車両の距離に対して、前記隣接車両が前記自車両の前方の前記走行車線へ移動する際の前記自車両に対する前記隣接車両の距離と前記自車両の速度との関係に基づいて決定される距離を加えた値を、前記第1車間距離として設定する、請求項1に記載の車両制御装置。
【請求項3】
前記設定部は、前記前方車両と前記自車両との間に前記隣接車両が位置するように、前記第1車間距離を設定する、請求項2に記載の車両制御装置。
【請求項4】
前記第2判定部は、前記自車両から第4の所定の範囲内に、前記隣接車線を走行する前記隣接車両の後方を走行する他の隣接車両があるか否かを判定し、
前記第2判定部によって前記他の隣接車両があると判定され、且つ、前記推定部によって前記隣接車両が前記自車両の前方の前記走行車線へ移動すると推定された場合、前記設定部は、前記自車両に対する前記前方車両の距離と、前記自車両に対する前記他の隣接車両の距離と、前記自車両の速度とに基づいて、前記前方車両と前記自車両との間に、前記他の隣接車両が位置できない長さとなるように、前記第1車間距離を設定する、請求項2に記載の車両制御装置。
【請求項5】
前記設定部は、前記自車両に対する前記前方車両の距離と前記自車両の速度との関係に基づいて決定される距離以下となるように、前記第1車間距離を設定する、請求項2に記載の車両制御装置。
【請求項6】
前記推定部は、前記自車両に対する前記前方車両の距離と、前記自車両に対する前記隣接車両の距離と、前記自車両の速度とを変数とする回帰式を用いて、前記隣接車両が前記自車両の前方の前記走行車線へ移動するか否かを推定する、請求項1に記載の車両制御装置。
【請求項7】
前記設定部は、前記隣接車両が前記自車両の前方の前記走行車線へ移動する際の前記自車両に対する前記隣接車両の距離と前記自車両の速度との関係に基づいて決定される距離を、前記第2車間距離として設定する、請求項1に記載の車両制御装置。
【請求項8】
前記推定部は、前記自車両に対する前記隣接車両の相対速度の絶対値が第1基準速度以上の場合、前記自車両に対する前記前方車両の距離と、前記自車両に対する前記隣接車両の距離と、前記自車両の速度に基づいて、前記合流地形において前記隣接車両が前記自車両の前方の前記走行車線へ移動するか否かを推定し、前記自車両に対する前記隣接車両の相対速度の絶対値が第1基準速度未満の場合、前記自車両に対する前記前方車両の距離と、前記自車両に対する前記隣接車両の距離とに基づいて、前記合流地形において前記隣接車両が前記自車両の前方の前記走行車線へ移動するか否かを推定する、請求項1に記載の車両制御装置。
【請求項9】
前記推定部は、前記自車両の速度が第2基準速度以上の場合、前記自車両に対する前記前方車両の距離と、前記自車両に対する前記隣接車両の距離と、前記自車両の速度とに基づいて、前記合流地形において前記隣接車両が前記自車両の前方の前記走行車線へ移動するか否かを推定し、前記自車両の速度が第2基準速度未満の場合、前記自車両に対する前記前方車両の距離と、前記自車両に対する前記隣接車両の距離とに基づいて、前記合流地形において前記隣接車両が前記自車両の前方の前記走行車線へ移動するか否かを推定する、請求項1に記載の車両制御装置。
【請求項10】
前記設定部は、前記自車両に対する前記前方車両の距離が、所定の基準距離以下の場合、前記第1車間距離を設定し、前記自車両に対する前記前方車両の距離が、前記所定の基準距離を超える場合、前記第2車間距離を設定する、請求項1から9の何れか一項に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御用コンピュータプログラム及び車両制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
車両に搭載される自動制御システムは、車両の現在位置と、車両の目的位置と、ナビゲーション用地図とに基づいて、車両のナビルートを生成する。自動制御システムは、地図情報を用いて車両の現在位置を推定し、車両をナビルートに沿って走行するように制御する。
【0003】
ナビルートには、自車両が走行する走行車線と隣接する隣接車線が走行車線と合流して消滅する合流地形が含まれることがある。合流地形では、隣接車線を走行する隣接車両は走行車線へ移動してくる。また、自車両の前方には、前方車両が走行車線を走行している場合がある。このような場合、自車両の自動制御システムは、前方車両と自車両との間に、隣接車両が移動可能なスペースを生成する(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2015-153153号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
合流地形において、隣接車両が自車両と前方車両との間に移動する際には、自車両と前方車両との間に、又は、自車両と隣接車両との間に、適切な車間距離が設定されることが好ましい。これにより、各車両の安全な走行を確保される。
【0006】
そこで、本開示では、合流地形において、隣接車両が自車両と前方車両との間に安全に移動できるように、自車両と前方車両との間に、又は、自車両と隣接車両との間に、適切な車間距離を設定できる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
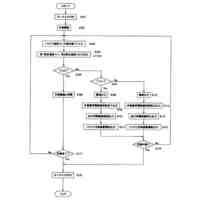
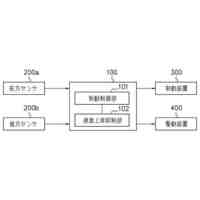
(1)一の実施形態によれば、車両制御装置が提供される。この車両制御装置は、地図情報に基づいて、自車両の現在位置から進行方向に向かった第1の所定の範囲内に、自車両が走行する走行車線と隣接する隣接車線が走行車線と合流することにより消滅する合流地形があるか否かを判定する第1判定部と、第1判定部によって合流地形があると判定された場合、自車両の周辺環境情報に基づいて、自車両から第2の所定の範囲内に、自車両の前方の走行車線を走行する前方車両があるか否かを判定し、且つ、自車両から第3の所定の範囲内に、隣接車線を走行する隣接車両があるか否かを判定する第2判定部と、第2判定部によって前方車両が有り且つ隣接車両があると判定された場合、自車両に対する前方車両の距離と、自車両に対する隣接車両の距離と、自車両の速度とに基づいて、合流地形において隣接車両が自車両の前方の走行車線へ移動するか否かを推定する推定部と、推定部によって隣接車両が自車両の前方の走行車線へ移動すると推定された場合、自車両に対する前方車両の距離と、自車両の速度とに基づいて、走行車線上における前方車両と自車両との間の第1車間距離を設定するか、又は、自車両の速度に基づいて、走行車線上における隣接車両と自車両との間の第2車間距離を設定する設定部と、を有する、ことを特徴とする。
【0008】
(2)(1)の車両制御装置において、設定部は、自車両に対する前方車両の距離に対して、隣接車両が自車両の前方の走行車線へ移動する際の自車両に対する隣接車両の距離と自車両の速度との関係に基づいて決定される距離を加えた値を、第1車間距離として設定することが好ましい。
【0009】
(3)(2)の車両制御装置において、設定部は、前方車両と自車両との間に隣接車両が位置するように、第1車間距離を設定することが好ましい。
【0010】
(4)(2)又は(3)の車両制御装置において、第2判定部は、自車両から第3の所定の範囲内に、隣接車線を走行する隣接車両の後方を走行する他の隣接車両があるか否かを判定し、第2判定部によって他の隣接車両があると判定され、且つ、推定部によって隣接車両が自車両の前方の走行車線へ移動すると推定された場合、設定部は、自車両に対する前方車両の距離と、自車両に対する他の隣接車両の距離と、自車両の速度とに基づいて、前方車両と自車両との間に、他の隣接車両が位置できない長さとなるように、第1車間距離を設定することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両用エアー傘
3か月前
個人
電池交換式自動車
2か月前
個人
自動車盗難防止装置
3か月前
個人
荷台雨除け装置
3か月前
個人
空気圧調節式ホイール。
10日前
日本精機株式会社
運転支援装置
1か月前
東レ株式会社
車両用エアバッグ
23日前
日本精機株式会社
表示システム
1か月前
個人
連結式、キャンピングカー
2か月前
日本精機株式会社
車外表示装置
2日前
個人
全自動解除式シートベルト
3か月前
個人
移動手段のミラーカバー。
2か月前
井関農機株式会社
作業車両
3か月前
ダイハツ工業株式会社
車両
10日前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
個人
車両の座席装置
2か月前
ダイハツ工業株式会社
車両
9日前
株式会社SUBARU
車両
3日前
エムケー精工株式会社
車両処理装置
13日前
アピオ株式会社
荷物用支持具
2か月前
日本化薬株式会社
ガス発生器
2か月前
スズキ株式会社
車両制御装置
1か月前
個人
テーブル付きハンドルガード具
3か月前
株式会社コーワ
フィルター清掃装置
3か月前
豊田合成株式会社
車両
23日前
個人
セパレート型キャンピングカー
3か月前
日本化薬株式会社
ガス発生器
2日前
豊田合成株式会社
車両
23日前
ダイハツ工業株式会社
レバー
2か月前
ダイハツ工業株式会社
車両構造
3か月前
豊田合成株式会社
乗員保護装置
3日前
ダイハツ工業株式会社
搭載構造
16日前
株式会社小糸製作所
車両用灯具
2か月前
株式会社JVCケンウッド
車両
3か月前
豊田合成株式会社
乗員保護装置
19日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ