TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024141137
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023052623
出願日
2023-03-29
発明の名称
ロボットインターフェースシステム
出願人
合同会社ビジネス実践研究所
代理人
個人
主分類
G06F
3/01 20060101AFI20241003BHJP(計算;計数)
要約
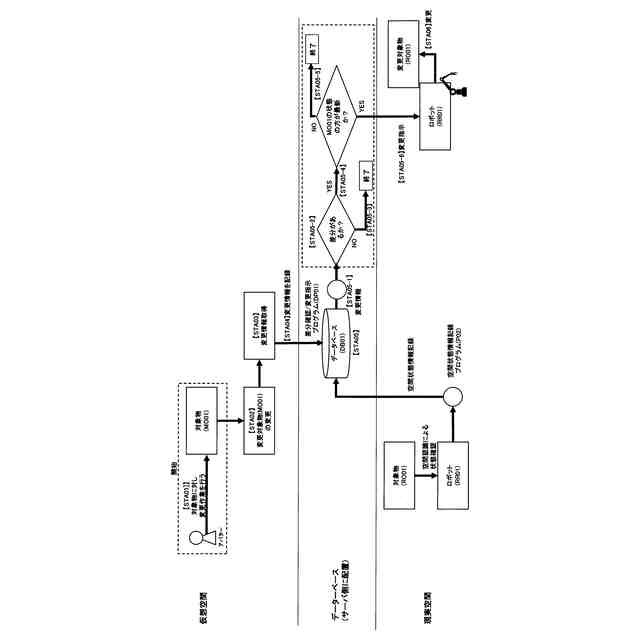
【課題】ユーザーが仮想空間においてアバターを利用して状態に変更を加えるのみで、現実空間に存在するロボットを用いて現実空間の状態に変更を加えて仮想空間の状態との整合を取り、かつ、現実空間の状態もボットが把握し、仮想空間の状態と現実空間の状態との整合を取るロボットインターフェースシステムを提供する。
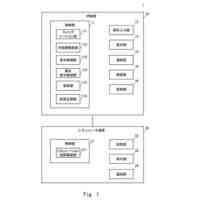
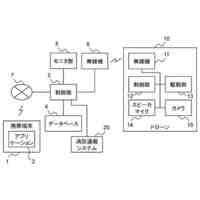
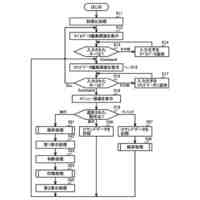
【解決手段】ロボットインターフェースシステムにおいて、差分確認/変更指示プログラムは、データベースDB01に記録されていた現実空間の対象物RO01の状態を示す情報と仮想空間の対象物MO01の状態を示す変更後情報とを比較することで差分を検出しSTA05-2、差分があれば仮想空間にある対象物MO01の状態と現実空間にある対象物RO01の状態のどちらの差分が最新かを検出しSTA05-4、仮想空間における対象物MO01の状態が最新であれば現実空間のロボットRR01に変更作業と同じ変更指示を行なうSTA06。
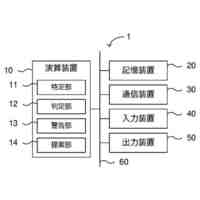
【選択図】図2
特許請求の範囲
【請求項1】
仮想空間に存在しているアバターが仮想空間にある対象物(MO01)に対して変更を加えることでその仮想空間にある対象物(MO01)とデジタルツイン状態にある現実空間の対象物(RO01)にロボット(RR01)を介して前記変更と同じ変更を加えるインターフェースシステムであって、
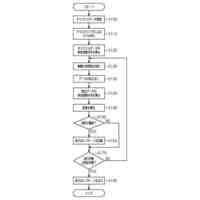
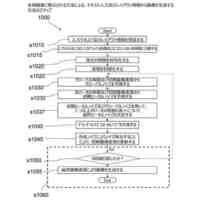
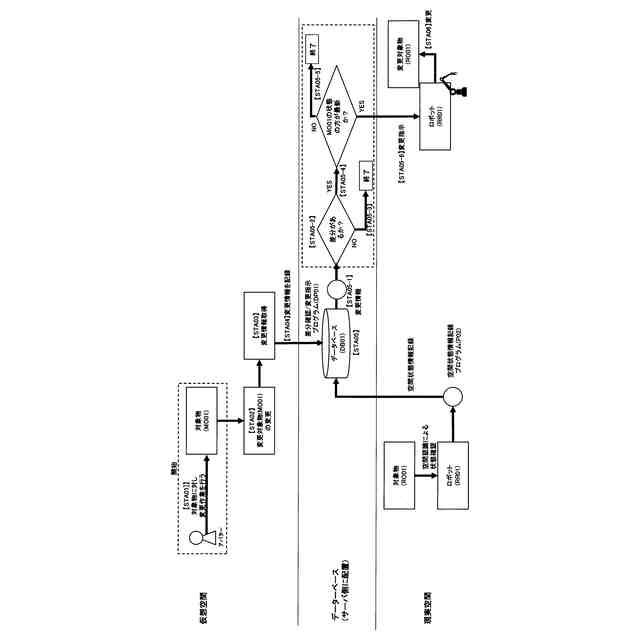
前記アバターが仮想空間にある対象物(MO01)に対して変更作業を行うこと(STA01)を契機に、
前記変更作業が行われた対象物(MO01)に前記変更作業に基づく変更を加え(STA02)、
変更された結果の対象物(MO01)の情報を取得し(STA03)、
前記対象物(MO01)の状態を示す変更後情報として記録し(STA04)、
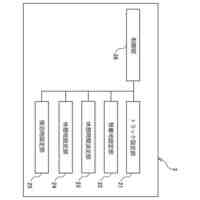
前記データベース(DB01)は、差分確認/変更指示プログラム(DP01)を起動し(STA05-1)、
前記差分確認/変更指示プログラム(DP01)は、あらかじめ前記データベース(DB01)に記録されていた前記現実空間の対象物(RO01)の状態を示す情報と前記仮想空間の対象物(MO01)の状態を示す前記変更後情報とを比較することで差分を検出し(STA05-2)、
差分がなければ前記差分確認/変更指示プログラム(DP01)をそのまま終了させ(STA05-3)、
差分があれば前記仮想空間にある対象物(MO01)の状態と前記現実空間にある対象物(RO01)の状態のどちらの差分が最新かを検出し(STA05-4)、
前記現実空間における対象物(RO01)の状態が最新であれば、前記差分確認/変更指示プログラム(DP01)を終了させ、(STA05-5)
前記仮想空間における対象物(MO01)の状態が最新であれば現実空間のロボット(RR01)に前記変更後情報に基づいて前記変更作業と同じ変更指示を行ない、前記差分確認/変更指示プログラム(DP01)を終了し(STA05-6)、
前記ロボット(RR01)は、前記現実の仮想空間の対象物(RO01)に対し、前記変更指示に従った変更を実行する(STA06)、
ことを特徴とするロボットインターフェースシステム。
続きを表示(約 1,600 文字)
【請求項2】
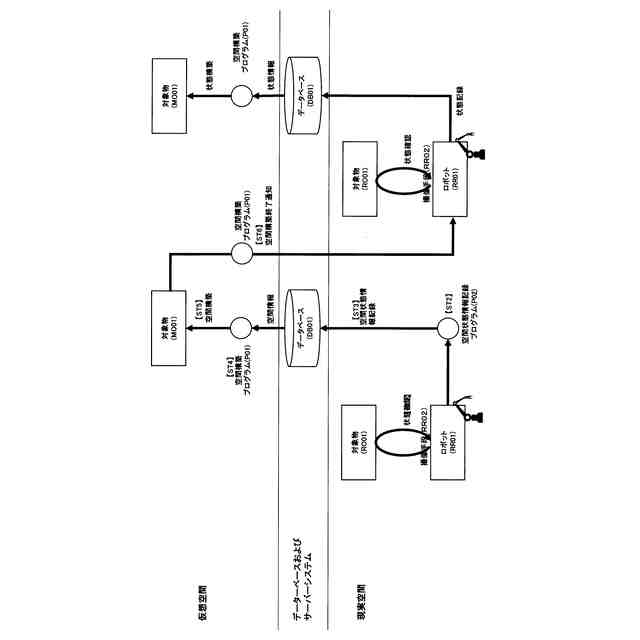
請求項1に記載のロボットインターフェースシステムであって、前記現実空間の対象物(RO01)の対象領域情報(RN01)を前記ロボット(RR01)が読み取り(STB01)、
空間状態情報記録プログラム(P02)を介して、前記データベース(DB01)に前記対象領域情報(RN01)を記録し(STB02)、
前記データベース(DB01)は、前記差分確認/変更指示プログラム(DP01)を起動し(STB03-1)、
前記差分確認/変更指示プログラム(DP01)は、前記仮想空間の対象物(MO01)の状態を示す対象領域情報(MN01)があらかじめ前記データベース(DB01)に記録されていた場合には、前記仮想空間の対象物(MO01)の状態を示す対象領域情報(MN01)と前記データベース(DB01)に新規に記録された前記現実空間の情報を示す対象領域情報(RN01)とを比較することで差分を検出し(STB03-2)、
差分がなければ差分確認/変更指示プログラム(DP01)をそのまま終了させ(STB03-3)、
前記データベース(DB01)にあらかじめ前記データベース(DB01)に記録されていた前記仮想空間の対象物(MO01)の状態を示す対象領域情報(MN01)がない場合は、現実空間の対象領域情報(RN01)の方が最新であると判断するとともに、差分があれば前記仮想空間の対象領域情報(MN01)が示す状態と、前記現実空間の新規に記録された対象領域情報(RN01)のどちらの差分が最新かを検出し(STB03-4)、
仮想空間の対象領域情報(MN01)の状態が最新であれば、現実空間の前記ロボット(RR01)に前記仮想空間の対象領域情報MN01に基づいて、現実空間を仮想空間の対象領域情報(MN01)の状態と同じ状態とする変更指示を行い(STB03-5)、
前記ロボット(RR01)は、現実空間を仮想空間の対象領域情報(MN01)の状態と同じ状態とする変更を実行し(STA04)、
現実空間の対象領域情報(RN01)の状態が最新であれば、仮想空間の空間構築プログラム(P01)に対して、仮想空間の対象領域情報((MN01)を現実空間の周辺空間状態(RN01)と同くするように変更指示し(STB03-6)、
前記仮想空間の空間構築プログラム(P01)は、前記仮想空間の対象領域情報(MN01)を前記現実空間の周辺空間状態RN01と同じ周辺空間状態に構築・変更する(STB05)
ことを特徴とするロボットインターフェースシステム。
【請求項3】
請求項1または請求項2に記載のロボットインターフェースシステムであって、
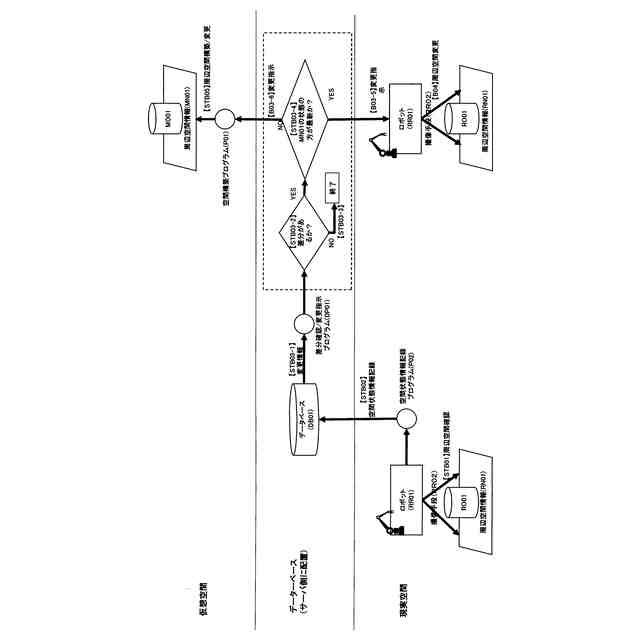
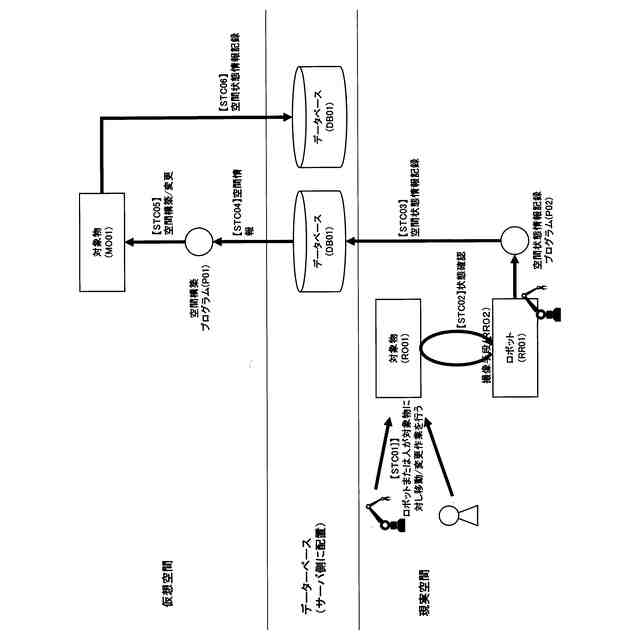
現実空間の対象物(RO01)に対して変更が行われ、または、移動が行なわれると(STC01)、
前記ロボットRR01は、前記現実空間の対象物(RO01)の空間状態を確認し(STC02)、
空間状態情報記録プログラム(P02)を介して、前記現実空間の空間状態情報(RN01)として前記データベース(DB01)に記録し(STC03)、
前記データベース(DB01)は、前記仮想空間の空間構築プログラム(P01)を起動し(STC04)、
前記仮想空間の空間構築プログラム(P01)は仮想空間上の対象物(MO01)の空間状態を前記現実空間の空間状態情報(RN01)に基づいて、前記現実空間の対象物(RO01)と同じ状態にする構築または変更を行い(STC05)、
構築または変更された前記仮想空間の空間状態情報(MN01)を前記データベース(DB01)に記録する(STC06)
ことを特徴とするロボットインターフェースシステム。
発明の詳細な説明
【技術分野】
【0001】
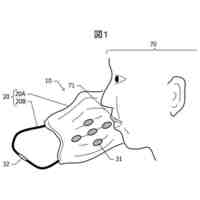
本発明は、仮想空間上のアバターがあたかも現実世界で作業するのと同じ感覚で作業をすることで、現実世界の対象物の移動や変更を行えるロボットのインターフェースシステム(「ロボットインターフェースシステム」、以下、本願発明のロボットインターフェースシステムを単に「システム」と称する場合がある)に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
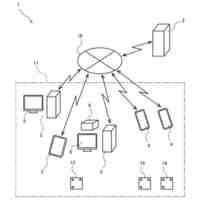
従来より、ヘッドマウントディスプレイ、モーションキャプチャ装置などを利用し、ユーザーに、サーバなどで生成した仮想空間の画像とその仮想空間内においてユーザーの動作を実行するアバターの動作を制御することで、ユーザー自身がその仮想空間に存在していると認識させる仮想空間体感システムが開発されている。
【0003】
また、現実空間に存在しているユーザーが、コンピュータ上に構築された仮想空間を介して、現実空間で自らが存在している空間(以下「ユーザー現実空間」という)とは異なる現実空間(「制御現実空間」という)に存在する制御対象の動作を制御するインターフェースシステムが開発されている。
【0004】
たとえば、実際にはユーザーの立ち入りが難しい領域(制御現実空間)に対応させた仮想空間に、現実空間の所定の領域(ユーザー現実空間)に存在しているユーザーに対応する第1アバターと、前記制御現実空間に存在している制御対象に対応する第2アバターを生成する。そして、ユーザーは仮想空間で第1アバターを介して第2アバターを動作させることで、ユーザーとは異なる領域に存在している制御対象を、自らが直接に触って動作させているかのように制御するシステムである。
【0005】
しかしながら、このシステムの構築に前述の仮想空間体感システムを利用する際にユーザーが制御するのはあくまでも仮想空間に存在する第1アバターであることから、制御現実空間における制約事項(例えば、第2アバターの周辺環境や機能など)を考慮せずに、第2アバターの動作を制御してしまうという問題が発生していた。
【0006】
そこで、ユーザーが仮想空間を介して、制御現実空間の第2アバターの動作をその制御現実空間に即して制御するインターフェースシステムが開発されている(特許文献1参照)。この特許文献1に記載のインターフェースシステムにおいては、ユーザーの動作に応じて、ユーザーに対応する第1アバターの動作を制御し、その第1アバターの操舵に応じて第1アバターの動作を制御している。これにより、ユーザーは、仮想空間で自らに対応する第1アバターを介して第2アバターを動作させることにより、現実空間で、第2アバターに対応する制御対象を動作する。その際に、第2アバターの動作を、制御現実空間の制御対象物が実行可能な動作に基づいて制限しつつ制御することで、ユーザー自身が、制御対象が存在する制御第2空間における制約までを考慮しなくても、制御現実空間における制御対象の動作を、その制御現実空間に即して制御することができる。
【先行技術文献】
【特許文献】
【0007】
特許第6933849号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1に記載の発明は、デジタルツインの世界を構築し、仮想空間上の第1アバターを介し、第2アバターが制御現実空間に存在する制御対象を操作して、仮想空間と現実空間とをリンクさせる発明であるが、つまりは、ユーザーは、アバターを操り、さらには、制御対象を操作するという2つの技能が必要になる。そこで、もっと簡便にデジタルツインの技術を利用しながら仮想空間と現実空間とをリンクさせることができるシステムの開発が望まれている。
【0009】
本発明はこの要望に応えるべくなされたものであり、ユーザーが仮想空間においてアバターを利用して状態に変更を加えるのみで、現実空間に存在するロボットを介して現実空間の状態に変更を加えて該仮想空間の状態との整合を取ることができ、現実空間の状態も常にロボットが把握し、仮想空間の状態と現実空間の状態との整合を取ることのできるロボットインターフェースシステムを提供する。
【課題を解決するための手段】
【0010】
前述した目的を達成するため、本発明の請求項1に記載のロボットインターフェースシステムは、仮想空間に存在しているアバターが仮想空間にある対象物(MO01)に対して変更を加えることでその仮想空間にある対象物(MO01)とデジタルツイン状態にある現実空間の対象物(RO01)にロボット(RR01)を介して前記変更と同じ変更を加えるインターフェースシステムであって、前記アバターが仮想空間にある対象物(MO01)に対して変更作業を行うと(STA01)、前記変更作業が行われた対象物(MO01)に前記変更作業に基づく変更を加え(STA02)、変更された結果の対象物(MO01)の情報を取得し(STA03)、前記対象物(MO01)の状態を示す変更後情報として記録し(STA04)、前記データベース(DB01)は、差分確認/変更指示プログラム(DP01)を起動し(STA05-1)、前記差分確認/変更指示プログラム(DP01)は、あらかじめ前記データベース(DB01)に記録されていた前記現実空間の対象物(RO01)の状態を示す情報と前記仮想空間の対象物(MO01)の状態を示す前記変更後情報を比較することで差分を検出し(STA05-2)、差分がなければ前記差分確認/変更指示プログラム(DP01)をそのまま終了させ(STA05-3)、差分があれば前記仮想空間にある対象物(MO01)の状態と前記現実空間にある対象物(RO01)の状態のどちらの差分が最新かを検出し(STA05-4)、前記現実空間における対象物(RO01)の状態が最新であれば、前記差分確認/変更指示プログラム(DP01)を終了させ(STA05-5)、前記仮想空間における対象物(MO01)の状態が最新であれば現実空間のロボット(RR01)に前記変更後情報に基づいて前記変更作業と同じ変更指示を行ない、前記差分確認/変更指示プログラム(DP01)を終了し(STA05-6)、前記ロボット(RR01)は、前記現実の仮想空間の対象物(RO01)に対し、前記変更指示に従った変更を実行する(STA06)、ことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
13日前
個人
人物再現システム
10日前
個人
AI飲食最適化プラグイン
3日前
個人
電話管理システム及び管理方法
4日前
有限会社ノア
データ読取装置
11日前
個人
広告提供システムおよびその方法
13日前
株式会社ザメディア
出席管理システム
18日前
個人
日誌作成支援システム
10日前
トヨタ自動車株式会社
作業判定方法
19日前
個人
ポイント還元付き配送システム
11日前
ミサワホーム株式会社
情報処理装置
17日前
株式会社タクテック
商品取出集品システム
17日前
トヨタ自動車株式会社
工程計画装置
18日前
オベック実業株式会社
接続構造
10日前
株式会社村田製作所
動き検知装置
17日前
ゼネラル株式会社
RFIDタグ付き物品
20日前
トヨタ自動車株式会社
情報処理システム
19日前
個人
コンテンツ配信システム
17日前
株式会社ドクター中松創研
生成AIの適切使用法
10日前
株式会社国際電気
支援システム
20日前
トヨタ自動車株式会社
情報処理方法
19日前
株式会社実身美
ワーキングシェアリングシステム
11日前
株式会社エスシーシー
置き配システム
11日前
個人
プラットフォームシステム
17日前
ブラザー工業株式会社
ラベルプリンタ
19日前
富士通株式会社
画像生成方法
23日前
株式会社 喜・扇
緊急事態対応円滑化システム
10日前
甍エンジニアリング株式会社
屋根材買い取りシステム
23日前
個人
注文管理システム及び注文管理プログラム
10日前
株式会社K-model
運用設計資料作成装置
13日前
株式会社知財事業研究所
運行計画作成システム
17日前
トヨタ自動車株式会社
作業支援システム
17日前
株式会社マーケットヴィジョン
情報処理システム
10日前
株式会社日立製作所
設計支援装置
18日前
トヨタ自動車株式会社
情報処理装置
10日前
日立建機株式会社
作業機械の管理装置
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ