TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024139957
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023050916
出願日
2023-03-28
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人サンネクスト国際特許事務所
主分類
E02F
9/26 20060101AFI20241003BHJP(水工;基礎;土砂の移送)
要約
【課題】遠隔操作可能な作業機械において、旋回動作時に十分な映像画質を確保する。
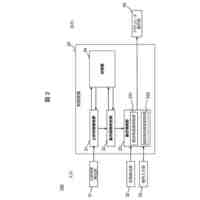
【解決手段】油圧ショベル1において、映像作成装置2は、車体の周囲を撮影して得られた映像データを出力する映像データ出力部3と、映像データの圧縮および/または符号化を行う映像データ符号化部5と、回動測定器8により測定された回動状態に基づいて、映像データ符号化部5が映像データを圧縮および/または符号化する際の動作パラメータを変更する映像データ符号化制御部6と、を備え、ネットワークインターフェース11は、映像データ符号化部5により映像データを圧縮および/または符号化することで生成された符号化映像データを無線送信する。
【選択図】図1
特許請求の範囲
【請求項1】
第1の構造体および第2の構造体を有する車体と、
前記第1の構造体と前記第2の構造体が相対的に回動するための回動機構と、
前記回動機構を駆動するアクチュエータと、
前記第1の構造体と前記第2の構造体との相対的な回動状態を測定する回動測定器と、
映像作成装置とを有し、
前記映像作成装置は、前記車体の周囲を撮影して得られた映像データを出力する映像データ出力部と、
前記映像データの圧縮または符号化を行う映像データ符号化部と、
前記回動測定器により測定された前記回動状態に基づいて、前記映像データ符号化部が前記映像データを圧縮または符号化する際の動作パラメータを変更する映像データ符号化制御部とを有し、
前記映像データ符号化部により前記映像データを圧縮または符号化することで生成された符号化映像データを無線送信する通信装置とを備えたことを特徴とする作業機械。
続きを表示(約 940 文字)
【請求項2】
請求項1に記載の作業機械において、
前記映像データ符号化制御部は、前記回動測定器により測定された前記回動状態に基づいて、前記第1の構造体と前記第2の構造体との相対的な回動速度を算出し、前記回動速度に基づいて前記動作パラメータを変更することを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記通信装置を介して、外部より無線送信される前記回動機構に対する操作信号を受信し、前記操作信号に基づいて前記アクチュエータの動作を制御することで前記回動機構を駆動させる操作信号処理部を備え、
前記映像データ符号化制御部は、前記回動速度と、前記操作信号処理部により受信された前記操作信号とに基づいて、未来の前記回動速度の予測値を算出し、前記回動速度の予測値に基づいて前記動作パラメータを変更することを特徴とする作業機械。
【請求項4】
請求項3に記載の作業機械において、
前記回動速度に対する閾値を記憶する閾値記憶部を備え、
前記映像データ符号化制御部は、
前記回動速度の予測値が前記閾値を超えない場合は、予め設定された第1の動作パラメータを前記映像データ符号化部に対して設定し、
前記回動速度の予測値が前記閾値を超える場合は、前記符号化映像データの伝送レートが前記第1の動作パラメータよりも低い第2の動作パラメータを、前記映像データ符号化部に対して設定することを特徴とする作業機械。
【請求項5】
請求項4に記載の作業機械において、
前記車体の周囲の外界情報を測定する外界情報測定器を備え、
前記第2の動作パラメータは、解像度とフレームレートを含み、
前記映像データ符号化制御部は、前記外界情報測定器により測定された前記外界情報に基づいて、前記第2の動作パラメータにおける前記解像度と前記フレームレートの値をそれぞれ決定することを特徴とする作業機械。
【請求項6】
請求項5に記載の作業機械において、
前記外界情報測定器は、前記車体の周囲の照度を測定する照度センサを含むことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作可能な作業機械に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
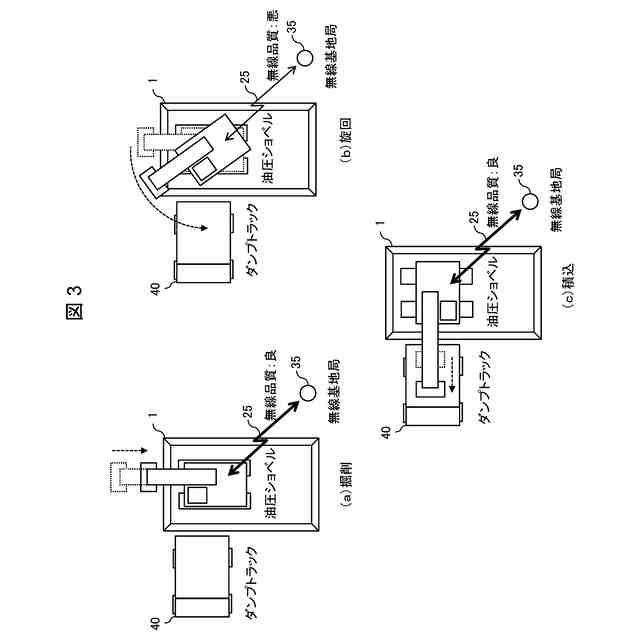
従来、遠隔操作により動作可能な作業機械の一例として、アンテナを搭載し、このアンテナを用いて無線通信局との間で無線通信を行うことにより、作業環境の映像データをオペレータへ伝送し、オペレータからの指示に応じて動作するショベル(以下「遠隔ショベルと称する」)が知られている。こうした遠隔ショベルでは、旋回動作時にアンテナと無線基地局との相対的な位置や姿勢角が変化することで電波伝搬環境が変化し、これによって無線通信の品質が一時的に低下することがある。その結果、遠隔ショベルから無線基地局へ映像データを伝送する際の回線容量が低下し、それに伴って映像データの伝送レートが低下することで、オペレータ側に表示される映像の画質が悪化するという問題が存在している。
【0003】
上記の問題を解決する技術として、特許文献1、2に記載の手法が知られている。特許文献1には、遠隔操縦用のパワーショベル1に搭載された送信用映像伝達装置と、この送信用映像伝送装置と正対して遠隔位置に固定配置された受信用映像伝達装置とを備え、これらの装置を介してパワーショベル1に搭載されたテレビカメラ8から送られた画像信号をモニタテレビ12でモニタするようにした遠隔操縦システムにおいて、パワーショベル1の機体4の旋回速度及び旋回方向を検出するためのエンコーダ18と、エンコーダ18の検出結果に基づき送信用映像伝達装置を支持する基台を回動させるモータ17を旋回速度と等速、かつ逆方向に回動させるためのコントローラ19とを備えたものが開示されている。特許文献2には、走行体に対する旋回体の旋回角度を検出する旋回角度センサと、基地局装置に追従可能に設けられて基地局装置との間でビームフォーミングを用いた通信を行う通信機と、旋回角度センサにより検出された旋回角度に基づいて通信機から基地局装置に送信される電波のビームフォーミングを制御する制御部と、を備える油圧ショベルが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開平7-288753号公報
特開2002-87604号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の遠隔操縦システムでは、旋回角度が一定の範囲内であるときには、送信用映像伝達装置の向きの変化に合わせて受信用映像伝達装置の向きを調整できるが、旋回角度がこの範囲を超えると、送信用映像伝達装置と受信用映像伝達装置の向きが互いに逆方向になるため、却って映像の画質が悪化してしまうおそれがある。また、特許文献2に記載の油圧ショベルでは、油圧ショベルに搭載された通信機の処理性能が低い場合や、旋回体の旋回速度が速い場合において、旋回角度に応じた電波のビームフォーミングが間に合わず、その結果、映像の画質を十分に確保できないおそれがある。このように、従来の遠隔ショベルでは、旋回動作時の映像の画質に関してさらなる改善の余地がある。
【0006】
本発明は、上記の点に鑑みてなされたものであり、その目的とするところは、遠隔操作可能な作業機械において、旋回動作時に十分な映像画質を確保することにある。
【課題を解決するための手段】
【0007】
本発明による作業機械は、第1の構造体および第2の構造体を有する車体と、前記第1の構造体と前記第2の構造体が相対的に回動するための回動機構と、前記回動機構を駆動するアクチュエータと、前記第1の構造体と前記第2の構造体との相対的な回動状態を測定する回動測定器と、前記車体の周囲を撮影して得られた映像データを出力する映像データ出力部と、前記映像データの圧縮および/または符号化を行う映像データ符号化部と、前記映像データ符号化部により前記映像データを圧縮および/または符号化することで生成された符号化映像データを無線送信する無線通信部と、前記回動測定器により測定された前記回動状態に基づいて、前記映像データ符号化部が前記映像データを圧縮および/または符号化する際の動作パラメータを変更する映像データ符号化制御部と、を備える。
【発明の効果】
【0008】
本発明によれば、遠隔操作可能な作業機械において、旋回動作時に十分な映像画質を確保することができる。
【0009】
なお、本発明に関連する更なる特徴は、本明細書の記述、添付図面から明らかになるものである。また、上記した以外の、課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
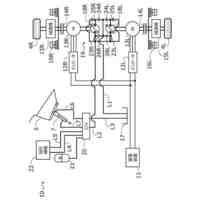
本発明の第1の実施形態に係る遠隔操作システムの全体構成を示す図。
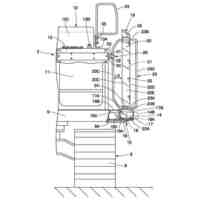
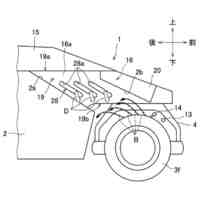
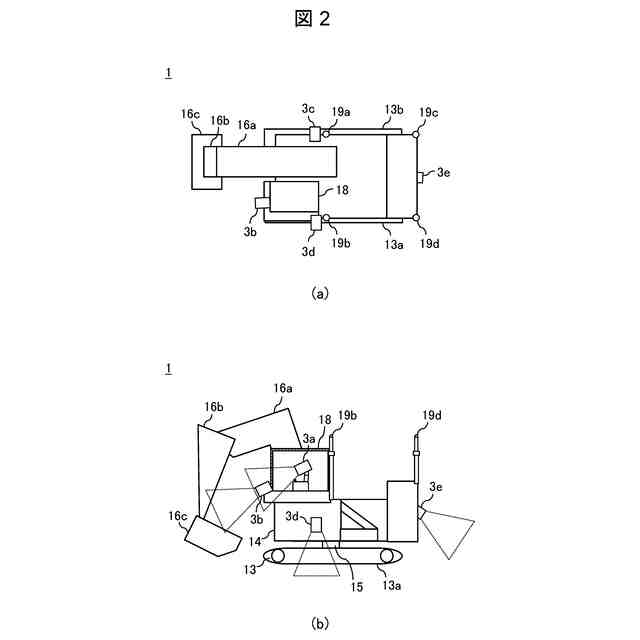
本発明の一実施形態に係る油圧ショベルの外観の概要を示す図。
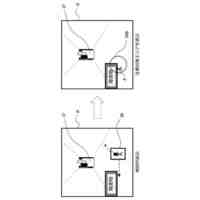
本発明の一実施形態に係る油圧ショベルの挙動例を示す図。
本発明の第1の実施形態に係る目標映像レート設定処理の制御フローを示すフローチャート。
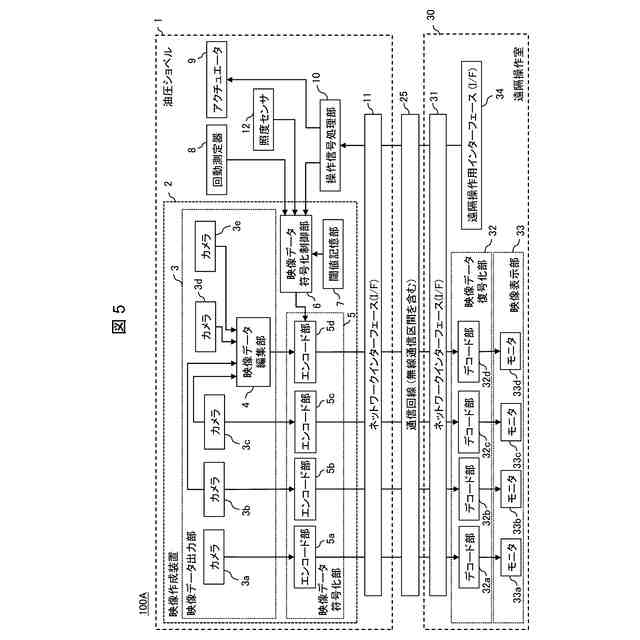
本発明の第2の実施形態に係る遠隔操作システムの全体構成を示す図。
本発明の第2の実施形態に係る目標映像レート設定処理の制御フローを示すフローチャート。
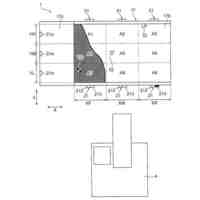
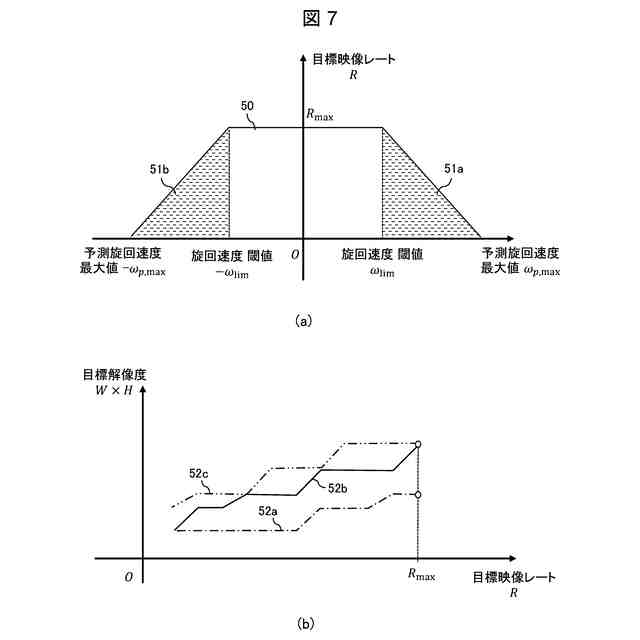
旋回時の目標映像レートと目標解像度および目標フレームレートの決定方法の説明図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
8日前
日立建機株式会社
作業車両
6日前
日立建機株式会社
作業機械
8日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業車両
7日前
日立建機株式会社
建設機械
7日前
日立建機株式会社
建設機械
7日前
日立建機株式会社
建設機械
7日前
日立建機株式会社
建設機械
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
建設機械
7日前
日立建機株式会社
建設機械
6日前
日立建機株式会社
作業車両
6日前
日立建機株式会社
作業機械
6日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
転圧機械
2日前
日立建機株式会社
作業機械
6日前
日立建機株式会社
転圧機械
2日前
日立建機株式会社
転圧機械
2日前
日立建機株式会社
転圧機械
2日前
日立建機株式会社
作業機械
6日前
日立建機株式会社
締固め機械
2日前
日立建機株式会社
締固め機械
2日前
日立建機株式会社
締固め機械
2日前
日立建機株式会社
遠隔操作装置
7日前
日立建機株式会社
タイヤローラ
2日前
日立建機株式会社
ダンプトラック
7日前
日立建機株式会社
ダンプトラック
6日前
日立建機株式会社
ダンプトラック
2日前
日立建機株式会社
鉱山管理システム
7日前
日立建機株式会社
斜軸式液圧回転機
7日前
日立建機株式会社
再生品管理システム
今日
日立建機株式会社
電動ダンプトラック
7日前
日立建機株式会社
作業機械の制御装置
6日前
日立建機株式会社
燃料電池式の建設機械
7日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ