TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024136838
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023048119
出願日
2023-03-24
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人ウィルフォート国際特許事務所
主分類
E02F
9/20 20060101AFI20240927BHJP(水工;基礎;土砂の移送)
要約
【課題】超信地旋回動作において回転中心と車体中心との位置のずれが発生した場合であっても、適切な自動走行を行うことができるようにする。
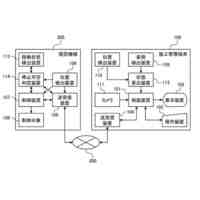
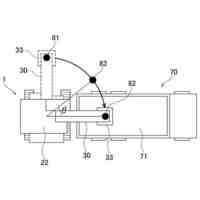
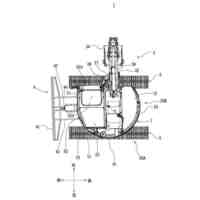
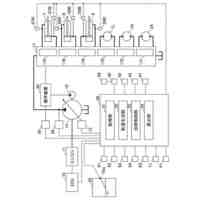
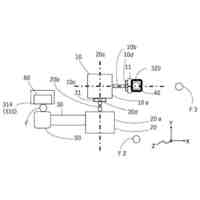
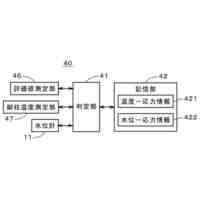
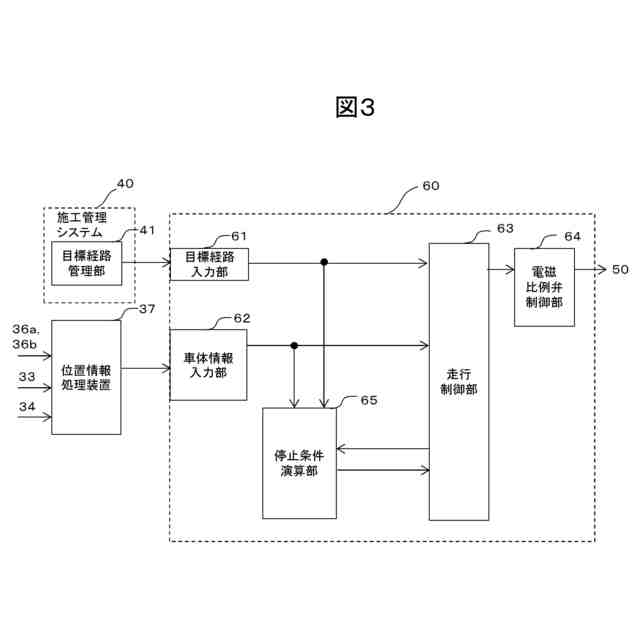
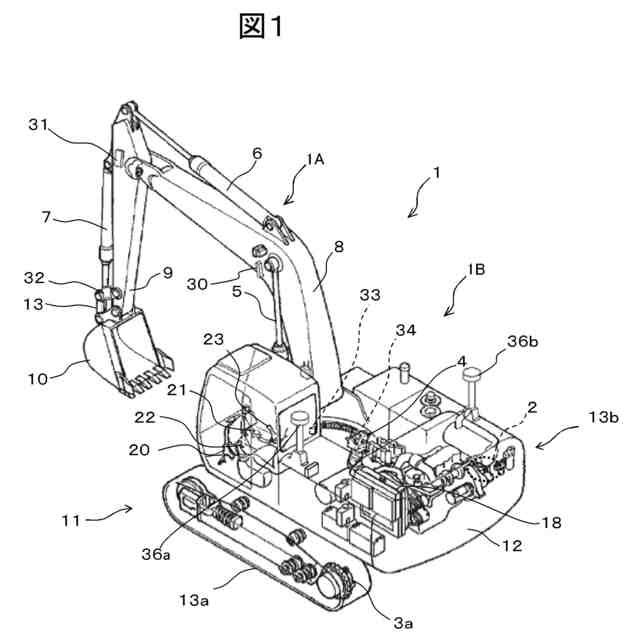
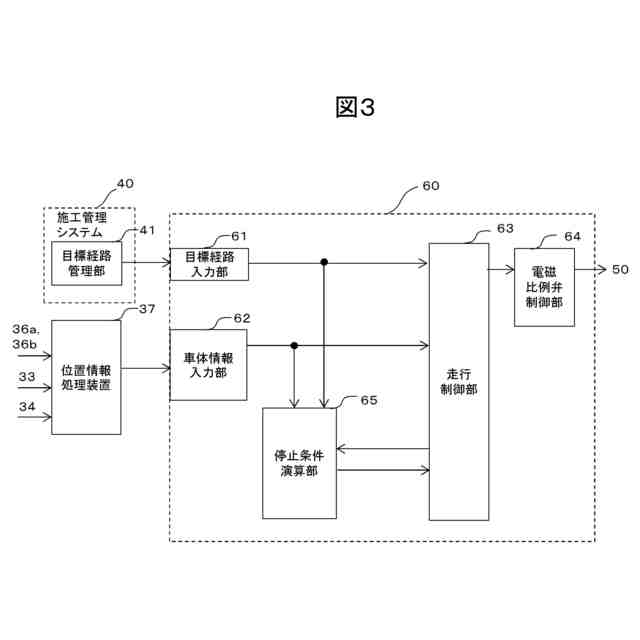
【解決手段】車体1Bを構成する走行体11と、車体1Bの位置及び方位を検出する位置情報処理装置37と、走行体11を制御して所定の目標経路に従って、超信地旋回動作と走行動作とを組み合わせた自動走行を行う制御装置60を備えた作業機械であって、制御装置60は、超信地旋回動作中において、油圧ショベルの位置及び方位に基づいて、前記超信地旋回動作を終わらせて後続の前記走行動作を開始した場合における目標ヨーレートを算出し、前記目標ヨーレートが0となった場合に、前記超信地旋回動作を終了し、後続の走行動作を開始させるように構成する。
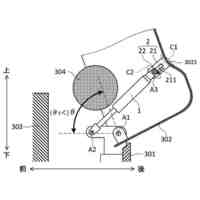
【選択図】図3
特許請求の範囲
【請求項1】
車体を構成する走行体と、
前記車体の位置及び方位を検出する位置検出装置と、
前記走行体を制御して所定の目標経路に従って、超信地旋回動作と走行動作とを組み合わせた自動走行を行う制御装置を備えた作業機械であって、
前記制御装置は、
前記超信地旋回動作中において、前記作業機械の位置及び方位に基づいて、前記超信地旋回動作を終わらせて後続の前記走行動作を開始した場合における目標ヨーレートを算出し、
前記目標ヨーレートが0となった場合に、前記超信地旋回動作を終了し、後続の走行動作を開始させる、
ことを特徴とする作業機械。
続きを表示(約 1,000 文字)
【請求項2】
前記制御装置は、
前記目標経路における前記超信地旋回動作を行う地点と、前記作業機械の位置とのずれ量が第一距離未満であるか否かを判定し、
前記ずれ量が前記第一距離未満である場合において、前記目標ヨーレートが0となった場合に、前記超信地旋回動作を終了し、後続の走行動作を開始させる
ことを特徴とする請求項1に記載の作業機械。
【請求項3】
前記制御装置は、
前記目標経路における前記超信地旋回動作を行う地点と、前記作業機械の位置とのずれ量が第一距離未満であるか否かを判定し、
前記ずれ量が前記第一距離未満でない場合であって、前記作業機械の方位が前記超信地旋回動作の終了目標方位を超過していない場合には、前記作業機械の方位が前記超信地旋回動作の終了目標方位と同じになった場合に、前記超信地旋回動作を終了し、後続の走行動作を開始させる
ことを特徴とする請求項1に記載の作業機械。
【請求項4】
前記制御装置は、
前記目標経路における前記超信地旋回動作を行う地点と、前記作業機械の位置とのずれ量が第一距離未満であるか否かを判定し、
前記ずれ量が前記第一距離未満でない場合であって、前記作業機械の方位が前記超信地旋回動作の終了目標方位と平行となる方位を超過している場合に、前記超信地旋回動作を終了し、後続の走行動作を開始させる
ことを特徴とする請求項1に記載の作業機械。
【請求項5】
前記制御装置は、
前記作業機械に対して前方注視一次モデルを用いて前記走行動作を制御し、
前記第一距離は、前記前方注視一次モデルでの前方注視点までの距離である
ことを特徴とする請求項2から請求項4のいずれか一項に記載の作業機械。
【請求項6】
前記制御装置は、
前記目標経路における前記超信地旋回動作を行う地点と、前記作業機械の位置とのずれ量が第二距離未満であるか否かを判定し、
前記ずれ量が前記第二距離未満でない場合に、前記超信地旋回動作を終了させる
ことを特徴とする請求項1に記載の作業機械。
【請求項7】
前記制御装置は、
前記目標ヨーレートが0となる前に、前記作業機械の方位が前記超信地旋回動作の終了目標方位と同じになった場合に、前記超信地旋回動作を終了し、後続の走行動作を開始させる
ことを特徴とする請求項1に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、目標経路に従って、超信地旋回動作と走行動作とを組み合わせた自動走行が可能な作業機械に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
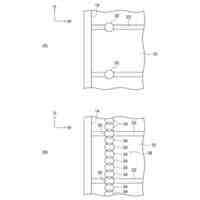
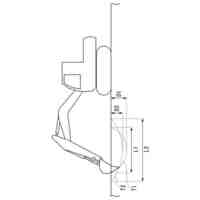
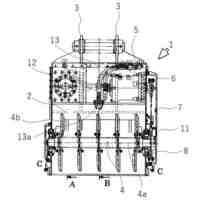
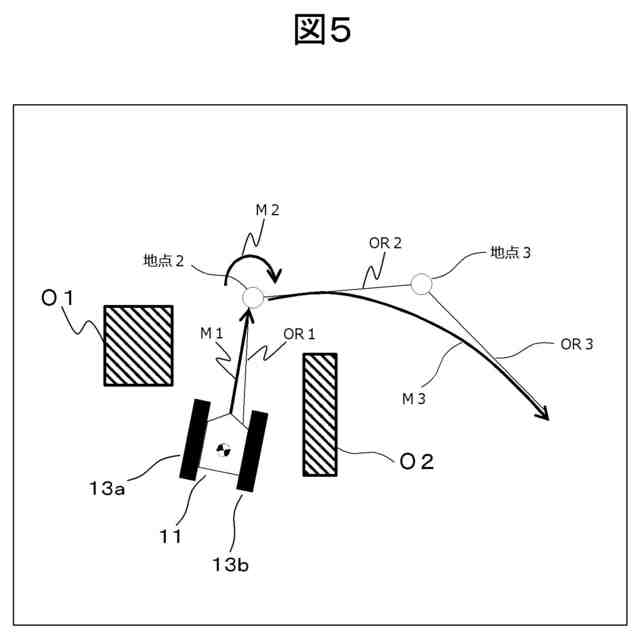
例えば、ショベル等の作業機械を自動走行させる技術が知られている。超信地旋回動作が可能な作業機械においては、超信地旋回動作と走行動作とが組み合わされて自動走行が行われる。超信地旋回動作は、左右のクローラをそれぞれ前方、後方に駆動して走行によりその場で旋回する動作である。
【0003】
自動走行に関する技術として、例えば、特許文献1には、駐車位置までの移動を支援できるショベルに関する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
国際公開第2019/182066号
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えば、左右のクローラを有する作業機械において、超信地旋回動作を行う場合には、左右のクローラを同じ速度で逆回転させることにより、その場での回転を行うことができる。この超信地旋回動作は、理想的には、回転中心と車体中心が一致していることとなるが、実際には、例えば、横滑り等の外乱により、回転中心と車体中心とのずれが発生する虞がある。このずれの発生については、予測や抑制は困難な場合がある。
【0006】
例えば、超信地旋回動作については、作業機械の方向(前方の方向)が目標経路の方向と同じになった場合に超信地旋回動作を終了させる制御を行うことがあるが、この制御においては、回転中心(回転すべき地点)と車体中心とのずれが発生すると、その後の走行動作を行う際に、無駄な旋回動作が必要となったり、作業機械が移動に必要な範囲が大きくなったりする虞がある。
【0007】
本発明は、上記事情に鑑みなされたものであり、その目的は、超信地旋回動作において回転中心と車体中心との位置のずれが発生した場合であっても、適切な自動走行を行うことのできる技術を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、一観点に係る作業機械は、車体を構成する走行体と、前記車体の位置及び方位を検出する位置検出装置と、前記走行体を制御して所定の目標経路に従って、超信地旋回動作と走行動作とを組み合わせた自動走行を行う制御装置を備えた作業機械であって、前記制御装置は、前記超信地旋回動作中において、前記作業機械の位置及び方位に基づいて、前記超信地旋回動作を終わらせて後続の前記走行動作を開始した場合における目標ヨーレートを算出し、前記目標ヨーレートが0となった場合に、前記超信地旋回動作を終了し、後続の走行動作を開始させる。
【0009】
上記作業機械において、前記制御装置は、前記目標経路における前記超信地旋回動作を行う地点と、前記作業機械の位置とのずれ量が第一距離未満であるか否かを判定し、前記ずれ量が前記第一距離未満である場合において、前記目標ヨーレートが0となった場合に、前記超信地旋回動作を終了し、後続の走行動作を開始させてもよい。
【0010】
また、上記作業機械において、前記制御装置は、前記目標経路における前記超信地旋回動作を行う地点と、前記作業機械の位置とのずれ量が第一距離未満であるか否かを判定し、前記ずれ量が前記第一距離未満でない場合であって、前記作業機械の方位が前記超信地旋回動作の終了目標方位を超過していない場合には、前記作業機械の方位が前記超信地旋回動作の終了目標方位と同じになった場合に、前記超信地旋回動作を終了し、後続の走行動作を開始させてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
建設機械の動作制御システム
8日前
個人
エア津波緩衝装置
10日前
個人
指示装置
9日前
株式会社クボタケミックス
桝蓋
9日前
住友建機株式会社
ショベル
3日前
コベルコ建機株式会社
作業機械
10日前
住友重機械工業株式会社
作業機械
9日前
個人
鋼管杭とその製造方法
9日前
コベルコ建機株式会社
作業機械
9日前
コベルコ建機株式会社
作業機械
9日前
スーパーレジンクラフト株式会社
防塵板付消波装置
3日前
ヤンマーホールディングス株式会社
作業機械
9日前
住友重機械工業株式会社
作業機械の制御装置
9日前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
4日前
個人
アンカーボルト支持装置
4日前
株式会社竹中工務店
山留め工法
9日前
株式会社竹中工務店
山留め工法
9日前
ニシオホールディングス株式会社
作業機械用操作装置
9日前
日特建設株式会社
基盤材処理システム
10日前
住友重機械工業株式会社
作業機械及び作業支援システム
9日前
ジャパンパイル株式会社
回転埋設杭
4日前
小岩金網株式会社
布団篭の本体パネル及び布団篭
8日前
あおみ建設株式会社
三点式杭打ち機のリーダ鉛直自動補正システム
3日前
カナデビア株式会社
異常検出装置および異常検出方法
2日前
東京電力ホールディングス株式会社
水中沈殿物回収ロボット
15日前
スエヒロシステム株式会社
ねじ式平ライナー及びその取付工具
2日前
株式会社東芝
蓋の開閉装置
4日前
ヤンマーホールディングス株式会社
作業機械
2日前
株式会社オーケーソイル
掘削機の泥土飛散防止部材保持具及び設置方法
9日前
株式会社小松製作所
制御装置および制御方法
9日前
株式会社横河NSエンジニアリング
水中基礎マウンド保護ネット
9日前
株式会社サン・エンジニア
ミキシングバケット
9日前
ナブテスコ株式会社
駆動装置及び駆動装置の制御方法
15日前
株式会社山辰組
サイフォン送水装置及びそれを使用したサイフォン送水工法
4日前
住友重機械工業株式会社
作業機械の周辺監視システム、及び作業機械
3日前
鹿島建設株式会社
杭施工方法、杭撤去方法および杭構造
2日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ