TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024136820
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023048082
出願日
2023-03-24
発明の名称
眼鏡レンズ加工システム及び眼鏡レンズ加工システムの制御プログラム
出願人
株式会社ニデック
代理人
主分類
B24B
9/14 20060101AFI20240927BHJP(研削;研磨)
要約
【課題】 搬送ロボットによってレンズ保持軸の隙間に眼鏡レンズを搬送する際に、レンズ保持軸にて眼鏡レンズを適切に保持させる。
【解決手段】 眼鏡レンズ加工システムは、眼鏡レンズを保持部に保持して搬送する搬送ロボットと、一対のレンズ保持軸の間に眼鏡レンズを保持して加工する眼鏡レンズ加工装置と、眼鏡レンズの屈折面形状の情報を取得する形状情報取得手段と、搬送ロボットの保持部に保持された眼鏡レンズと一対のレンズ保持軸との相対的な位置関係を変える相対移動手段であって、取得された屈折面形状に基づいて眼鏡レンズの相対的な移動を少なくとも二次元的に変化させることで、一対のレンズ保持軸の隙間の所定の挿入位置に眼鏡レンズを挿入させる相対移動手段と、を備える。
【選択図】 図12
特許請求の範囲
【請求項1】
眼鏡レンズ加工システムは、
眼鏡レンズを保持部に保持して搬送する搬送ロボットと、
一対のレンズ保持軸の間に眼鏡レンズを保持して加工する眼鏡レンズ加工装置と、
眼鏡レンズの屈折面形状の情報を取得する形状情報取得手段と、
前記搬送ロボットの保持部に保持された眼鏡レンズと前記一対のレンズ保持軸との相対的な位置関係を変える相対移動手段であって、取得された前記屈折面形状に基づいて眼鏡レンズの相対的な移動を少なくとも二次元的に変化させることで、前記一対のレンズ保持軸の隙間の所定の挿入位置に眼鏡レンズを挿入させる相対移動手段と、
を備えることを特徴とする眼鏡レンズ加工システム。
続きを表示(約 2,100 文字)
【請求項2】
請求項1の眼鏡レンズ加工システムにおいて、
前記相対移動手段は、前記一対のレンズ保持軸の位置に対する前記屈折面形状の位置関係に基づいて眼鏡レンズの移動を少なくとも二次元的に変化させることを特徴とする眼鏡レンズ加工システム。
【請求項3】
請求項2の眼鏡レンズ加工システムにおいて、
前記一対のレンズ保持軸は、眼鏡レンズの前屈折面側を保持する第1保持軸と、眼鏡レンズの後屈折面側を保持する第2保持軸とを備え、
前記相対移動手段は、前記第1保持軸及び前記第2保持軸の少なくとも一方の位置に関して定められた所定のポイント又は所定の領域を、前記屈折面形状が通過するように、眼鏡レンズの移動を二次元的に変化させることで、前記所定の挿入位置に眼鏡レンズを挿入すること特徴とする眼鏡レンズ加工システム。
【請求項4】
請求項3の眼鏡レンズ加工システムにおいて、
前記形状情報取得手段は、眼鏡レンズの前屈折面及び後屈折面の形状の少なくとも一つを取得し、
前記相対移動手段は、
(a)前記第1保持軸の位置に関して定められた所定の第1ポイントを、前記前屈折面が通過するように眼鏡レンズの移動を二次元的に変化させる第1制御と、
(b)前記第2保持軸の位置に関して定められた所定の第2ポイントを、前記後屈折面が通過するように眼鏡レンズの移動を二次元的に変化させる第2制御と、
(c)前記第1保持軸と前記第2保持軸との中間に設定された所定の第3ポイントを、前記前屈折面と前記後屈折面との間の中間形状が通過するように眼鏡レンズの移動を二次元的に変化させる第3制御と、
(d)前記第1保持軸と前記第2保持軸との間に設定された所定領域を、前記前屈折面と前記後屈折面の両者が通過するように、眼鏡レンズの移動を二次元的に変化させる第4制御と、
の何れかの制御によって前記所定の挿入位置に眼鏡レンズを挿入すること特徴とする眼鏡レンズ加工システム。
【請求項5】
請求項3又は4の眼鏡レンズ加工システムにおいて、
前記相対移動手段は、眼鏡レンズを前記一対のレンズ保持軸の隙間に挿入する前に、レンズ保持軸の軸方向に垂直な方向に対して、眼鏡レンズの屈折面を傾斜させること特徴とする眼鏡レンズ加工システム。
【請求項6】
請求項3~5の何れかの眼鏡レンズ加工システムにおいて、
前記相対移動手段は、眼鏡レンズを前記一対のレンズ保持軸の隙間に挿入する前に、前記第2保持軸より遠い側に位置する前記後屈折面の端部が前記第2保持軸に近づくように眼鏡レンズを傾斜させ、前記レンズ保持軸に垂直な方向の挿入方向への眼鏡レンズの移動に伴って前記傾斜を戻すように、眼鏡レンズの移動を変化させること特徴とする眼鏡レンズ加工システム。
【請求項7】
請求項3~6の何れかの眼鏡レンズ加工システムにおいて、
前記形状情報取得手段は、眼鏡レンズの前記前屈折面に固定された加工治具のカップの外形形状情報を取得し、
前記相対移動手段は、前記外形形状情報に基づき、前記カップが前記第1保持軸に接触しない位置まで眼鏡レンズを前記第1保持軸と前記第2保持軸との隙間に挿入した後、前記レンズ保持軸の軸方向において、前記カップが挿入可能な位置に眼鏡レンズを移動させることで、前記所定の挿入位置に眼鏡レンズを挿入させることを特徴とする眼鏡レンズ加工システム。
【請求項8】
請求項1~7の何れかの眼鏡レンズ加工システムにおいて、
前記形状情報取得手段は、眼鏡レンズの前記前屈折面に固定された加工治具のカップの端部から眼鏡レンズの前記後屈折面の端部までの、前記レンズ保持軸の軸方向におけるレンズ距離を取得し、
前記相対移動手段は、前記レンズ距離が前記一対のレンズ保持軸の隙間間隔より小さいか否か判断し、小さいと判断された場合には、前記屈折面形状に基づく二次元的な眼鏡レンズの移動の制御を行わずに、眼鏡レンズを前記所定の挿入位置に挿入させることを特徴とする眼鏡レンズ加工システム。
【請求項9】
眼鏡レンズを保持部に保持して搬送する搬送ロボットと、一対のレンズ保持軸の間に眼鏡レンズを保持して加工する眼鏡レンズ加工装置と、眼鏡レンズの屈折面形状の情報を取得する形状情報取得手段と、前記搬送ロボットの保持部に保持された眼鏡レンズと前記一対のレンズ保持軸との相対的な位置関係を変える相対移動手段と、制御装置と、を備える眼鏡レンズ加工システムの制御プログラムであって、
前記相対移動手段を制御する制御ステップであって、取得された前記屈折面形状に基づいて眼鏡レンズの移動を少なくとも二次元的に変化させることで、前記一対のレンズ保持軸の隙間の所定の挿入位置に眼鏡レンズを挿入させる制御ステップを、前記制御装置に実行させることを特徴とする眼鏡レンズ加工システムの制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、眼鏡レンズの周縁を眼鏡レンズ加工装置によって加工する眼鏡レンズ加工システム及びその制御プログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
眼鏡レンズの周縁加工を自動化する上で、眼鏡レンズを保持して眼鏡レンズ加工装置に搬送する搬送ロボットを使用することが提案されている(例えば、特許文献1参照)。また、眼鏡レンズ加工装置においては、一般に、一対のレンズ保持軸の隙間にレンズが挿入にされた後、レンズ押さえ側にレンズ保持軸が移動されることで、眼鏡レンズがレンズ保持軸に保持され、レンズ保持軸に保持された眼鏡レンズの周縁が加工具によって加工される(例えば、特許文献2参照)
【先行技術文献】
【特許文献】
【0003】
特開2021―58948号公報
特開2016-190287号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、搬送ロボットによって眼鏡レンズを搬送し、眼鏡レンズ加工装置が持つ一対のレンズ保持軸に眼鏡レンズを保持させるために、一対のレンズ保持軸の隙間に眼鏡レンズを挿入する場合、眼鏡レンズの形状によっては、レンズ保持軸に眼鏡レンズが干渉してしまうことが分かった。
【0005】
本開示は、搬送ロボットによってレンズ保持軸の隙間に眼鏡レンズを搬送する際に、レンズ保持軸にて眼鏡レンズを適切に保持させることができる眼鏡レンズ加工システム及び制御プログラムを提供することを技術課題とする。
【課題を解決するための手段】
【0006】
(1) 本開示の第1態様に係る眼鏡レンズ加工システムは、眼鏡レンズを保持部に保持して搬送する搬送ロボットと、一対のレンズ保持軸の間に眼鏡レンズを保持して加工する眼鏡レンズ加工装置と、眼鏡レンズの屈折面形状の情報を取得する形状情報取得手段と、前記搬送ロボットの保持部に保持された眼鏡レンズと前記一対のレンズ保持軸との相対的な位置関係を変える相対移動手段であって、取得された前記屈折面形状に基づいて眼鏡レンズの相対的な移動を少なくとも二次元的に変化させることで、前記一対のレンズ保持軸の隙間の所定の挿入位置に眼鏡レンズを挿入させる相対移動手段と、を備えることを特徴とする。
(2) 本開示の第2態様に係る眼鏡レンズ加工システムの制御プログラムは、眼鏡レンズを保持部に保持して搬送する搬送ロボットと、一対のレンズ保持軸の間に眼鏡レンズを保持して加工する眼鏡レンズ加工装置と、眼鏡レンズの屈折面形状の情報を取得する形状情報取得手段と、前記搬送ロボットの保持部に保持された眼鏡レンズと前記一対のレンズ保持軸との相対的な位置関係を変える相対移動手段と、制御装置と、を備える眼鏡レンズ加工システムの制御プログラムであって、前記相対移動手段を制御する制御ステップであって、取得された前記屈折面形状に基づいて眼鏡レンズの移動を少なくとも二次元的に変化させることで、前記一対のレンズ保持軸の隙間の所定の挿入位置に眼鏡レンズを挿入させる制御ステップを、前記制御装置に実行させることを特徴とする。
【図面の簡単な説明】
【0007】
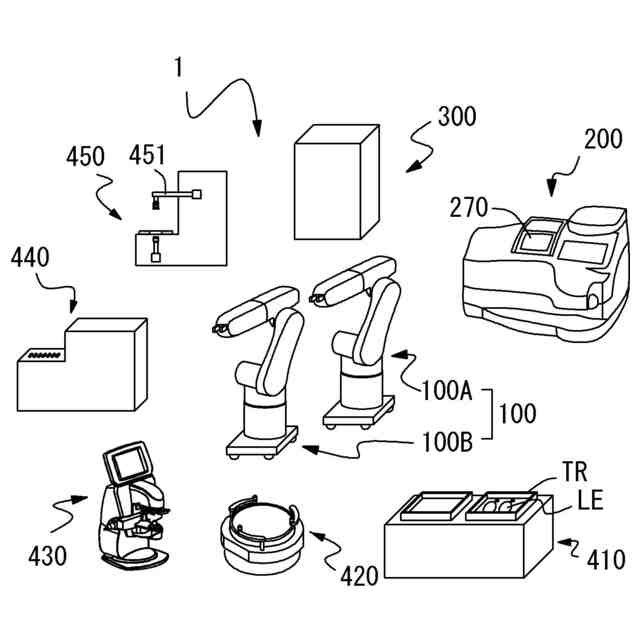
実施例に係る眼鏡レンズ加工システムを示す図である。
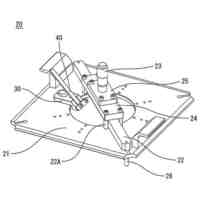
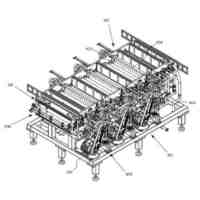
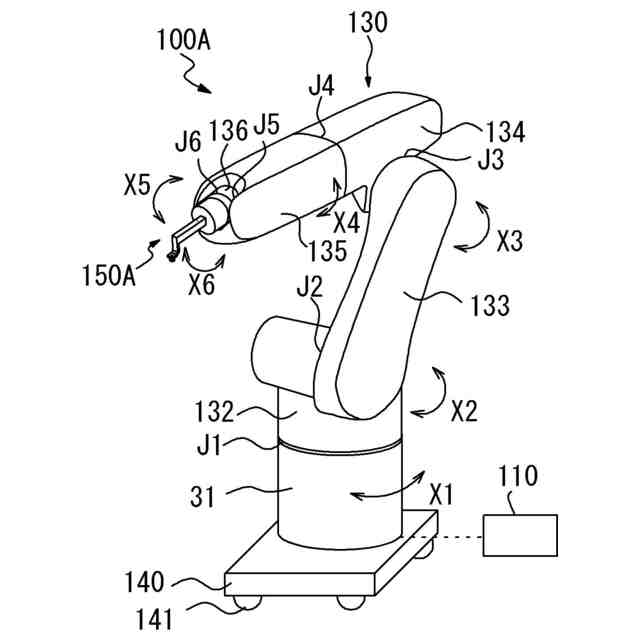
搬送ロボットの例を説明する図である。
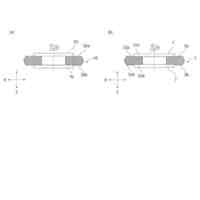
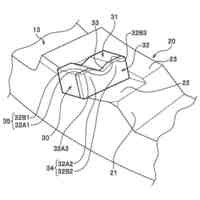
搬送ロボットが有する保持部の例を説明する図である。
搬送ロボットが有する保持部の別の例を説明する図である。
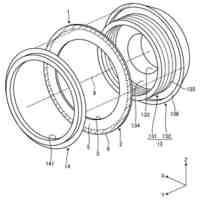
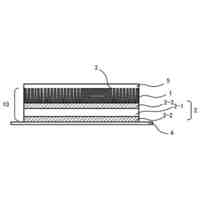
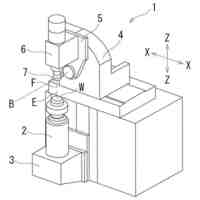
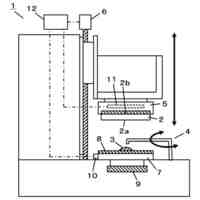
レンズ形状測定装置が備えるレンズ形状測定機構を説明する図である。
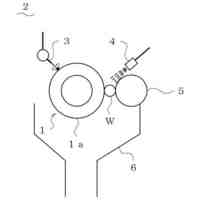
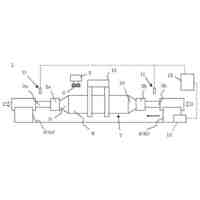
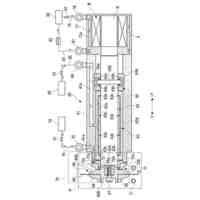
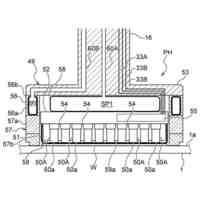
眼鏡レンズ加工装置の概略構成を説明する図である。
眼鏡レンズ加工システムの全体の制御系の構成を示す図である。
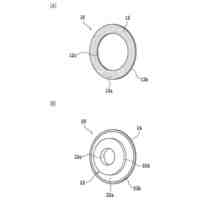
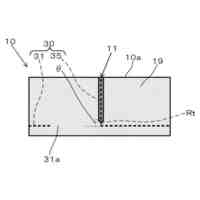
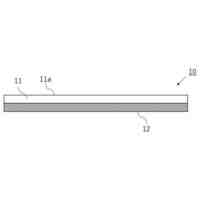
カップに対する粘着テープの貼付けを説明する図である。
搬送ロボットによる、レンズ保持軸に対する眼鏡レンズの進入方向を示す図である。
レンズ保持軸に対する、通常のレンズ移動を説明する図である。
眼鏡レンズ側の最大レンズ距離と、一対のレンズ保持軸の隙間間隔と、の関係を示す図である。
レンズ前面基準の場合におけるレンズ移動を説明する図である。
レンズ前面基準における移動軌跡の演算の一例を説明する図である。
レンズ後面基準の場合におけるレンズ移動を説明する図である。
る眼鏡レンズの前屈折面情報及び後屈折面情報の両方に基づいたレンズ移動を説明する図である。
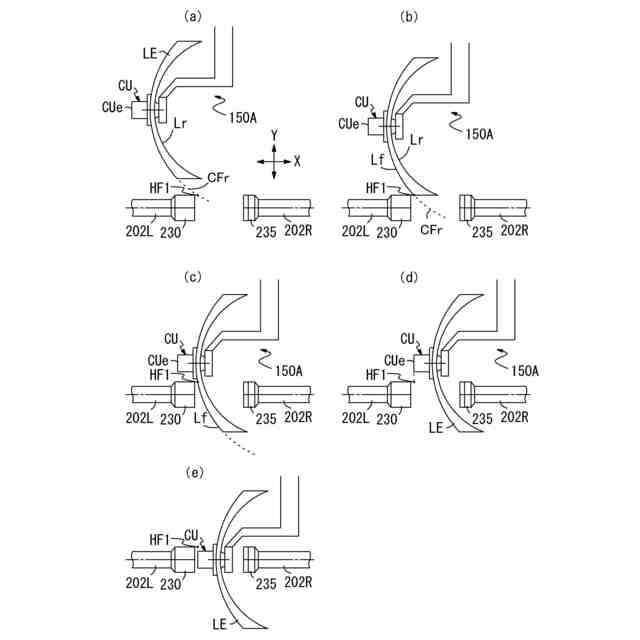
る眼鏡レンズの屈折面形状に基づくレンズ移動の変容例を説明する図である。
る眼鏡レンズの屈折面形状に基づくレンズ移動の他の変容例を説明する図である。
【発明を実施するための形態】
【0008】
[概要]
以下、典型的な実施形態の1つについて、図面を参照して説明する。なお、以下の<>にて分類された項目は、独立又は関連して利用されうる。
【0009】
例えば、眼鏡レンズ加工システム(例えば、眼鏡レンズ加工システム1)は、搬送ロボット(例えば、搬送ロボット100)と、眼鏡レンズ加工装置(例えば、眼鏡レンズ加工装置200)と、形状情報取得手段(例えば、レンズ形状測定装置300、制御装置50、制御部110)と、相対移動手段(例えば、搬送ロボット100、移動ユニット250、制御部110、制御部210、制御装置50)と、を備える。例えば、眼鏡レンズ加工システムは、制御手段(例えば、制御部110、制御部210、制御装置50)を備えていてもよい。例えば、眼鏡レンズ加工システムは、制御プログラムを実行する制御装置(例えば、制御部110、制御部210、制御装置50)を備えていてもよい。
【0010】
<搬送ロボット>
例えば、搬送ロボットは、眼鏡レンズを保持部(例えば、保持部150A、保持部150B)に保持する。例えば、搬送ロボットは、保持部に保持した眼鏡レンズを移動する。例えば、搬送ロボットは、アーム部(例えば、アーム部130)を備える。例えば、アーム部は複数の関節部を有する。例えば、搬送ロボットは、関節部を介してアーム部を回転させることで、保持部にて保持された眼鏡レンズを移動させる。例えば、搬送ロボットは、必ずしも複数の関節部を備えなくてもよく、眼鏡レンズ加工装置への眼鏡レンズLEの場合、少なくとも二次元的に眼鏡レンズを移動できる構成であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社トクピ製作所
研削方法
19日前
東亜非破壊検査株式会社
タンク溶接線検査前処理装置
5日前
株式会社ディスコ
加工方法
19日前
株式会社ディスコ
砥石
14日前
NTN株式会社
異常検知システム
14日前
株式会社ディスコ
切削ブレード
13日前
ニッタ・デュポン株式会社
研磨布
19日前
株式会社ディスコ
ブレード着脱具
5日前
株式会社ディスコ
研削砥石
5日前
株式会社ナノテム
砥石及びその製造方法
12日前
株式会社ディスコ
被加工物の処理方法
7日前
信越半導体株式会社
円筒研削機および円筒研削方法
19日前
株式会社ディスコ
加工工具の管理方法
14日前
大協技研工業株式会社
シート状吸着・粘着部材
12日前
株式会社ディスコ
スピンドルユニット
5日前
共立精機株式会社
超半球形状の加工方法
12日前
株式会社ディスコ
切削ブレードの目立て方法
12日前
株式会社精工技研
光ファイバ研磨用ホルダーおよび光ファイバ研磨装置
12日前
株式会社荏原製作所
研磨ヘッドおよび研磨システム
19日前
株式会社アライドマテリアル
ロータリードレッサ
5日前
正嘉科技(広東)有限公司
全自動のレーザー厚さ測定の多軸研磨洗浄装置
12日前
株式会社呉英製作所
回転砥石及び回転砥石工具
12日前
株式会社牧野フライス製作所
シール面の加工方法および加工装置
19日前
信越半導体株式会社
ウェーハへの樹脂塗布方法及びウェーハの製造方法
12日前
株式会社ジェイテクトマシンシステム
センタレス研削方法及びセンタレス研削装置
13日前
株式会社ジェイテクトグラインディングツール
研削用砥石およびその製造方法
14日前
新東工業株式会社
管理システム及び管理方法
20日前
富士紡ホールディングス株式会社
研磨パッド及び研磨加工物の製造方法
18日前
富士紡ホールディングス株式会社
研磨パッド及び研磨加工物の製造方法
18日前
株式会社SUMCO
研磨パッドのドレッシング条件設定方法、ウェーハの片面研磨方法、ウェーハの製造方法、研磨パッドのドレッシング条件設定装置およびウェーハの片面研磨装置
6日前
アプライド マテリアルズ インコーポレイテッド
研磨液供給アームの洗浄システム
7日前
個人
核変換システム
19日前
株式会社アイシン
固体酸化物形セル用電解質の製造方法および酸化物膜の製造方法
20日前
他の特許を見る








 特許ウォッチ
特許ウォッチ