TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024135469
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023046166
出願日
2023-03-23
発明の名称
対象物追跡プログラム、対象物追跡装置及びその方法
出願人
日本精機株式会社
代理人
主分類
G06T
7/20 20170101AFI20240927BHJP(計算;計数)
要約
【課題】対象物を好適に追跡できる対象物追跡プログラム、対象物追跡装置及びその方法を提供する。
【解決手段】本実施形態における対象物追跡プログラムは、コンピュータに、撮影画像を取得する画像取得手段と、撮影画像に含まれる検出対象物を検出可能な第一検出方法を用いて、撮影画像から検出対象物を検出する検出手段と、撮影画像に含まれる検出対象物を検出可能な第一検出方法とは異なる第二検出方法を用いて、検出手段が検出した検出対象物を追跡対象物として撮影画像から繰り返し検出することで、撮影画像内で追跡対象物を追跡する追跡手段と、を実行させる。
【選択図】 図2
特許請求の範囲
【請求項1】
コンピュータに、
撮影画像を取得する画像取得手段と、
前記撮影画像に含まれる検出対象物を検出可能な第一検出方法を用いて、前記撮影画像から前記検出対象物を検出する検出手段と、
前記撮影画像に含まれる前記検出対象物を検出可能な前記第一検出方法とは異なる第二検出方法を用いて、前記検出手段が検出した前記検出対象物を追跡対象物として前記撮影画像から繰り返し検出することで、前記撮影画像内で前記追跡対象物を追跡する追跡手段と、
を実行させるための対象物追跡プログラム。
続きを表示(約 1,200 文字)
【請求項2】
前記検出手段は、前記検出対象物が含まれる前記撮影画像内の領域であるバウンディングボックスを検出し、
前記追跡手段は、前記バウンディングボックス内又は前記バウンディングボックスに対して所定量拡張された領域内を検出範囲として前記追跡対象物を検出する、請求項1記載の対象物追跡プログラム。
【請求項3】
前記追跡手段は、前記検出範囲で前記追跡対象物が検出された後、前記追跡手段が検出した前記追跡対象物が含まれる前記撮影画像内の領域である新規バウンディングボックスを検出し、前記新規バウンディングボックス内又は前記新規バウンディングボックスに対して所定量拡張された領域内を新規検出範囲として前記追跡対象物を検出する、請求項2記載の対象物追跡プログラム。
【請求項4】
前記第二検出方法は、パターンマッチングであり、
前記追跡手段は、前記検出手段が検出した前記検出対象物の画像と、前記追跡手段が検出した前記追跡対象物の画像と、から検出の確度を算出し、
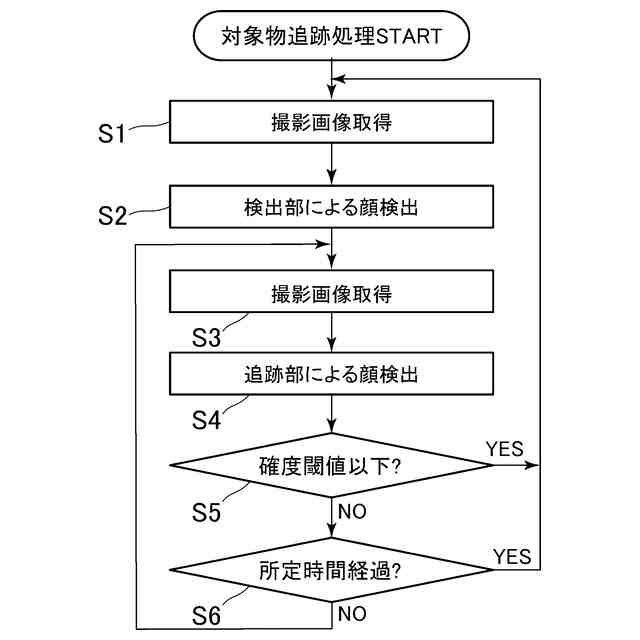
前記検出手段は、前記確度が閾値以下となった場合、前記撮影画像から前記検出対象物を再検出し、
前記追跡手段は、前記検出手段が再検出した前記検出対象物を新規追跡対象物として前記撮影画像から繰り返し検出する、請求項1記載の対象物追跡プログラム。
【請求項5】
前記第二検出方法は、パターンマッチングであり、
前記検出手段は、前記検出対象物を検出してから所定時間が経過した場合、前記撮影画像から前記検出対象物を再検出し、
前記追跡手段は、前記検出手段が再検出した前記検出対象物を新規追跡対象物として前記撮影画像から繰り返し検出する、請求項1記載の対象物追跡プログラム。
【請求項6】
撮影画像を取得する画像取得部と、
前記撮影画像に含まれる検出対象物を検出可能な第一検出方法を用いて、前記撮影画像から前記検出対象物を検出する検出部と、
前記撮影画像に含まれる前記検出対象物を検出可能な前記第一検出方法とは異なる第二検出方法を用いて、前記検出部が検出した前記検出対象物を追跡対象物として前記撮影画像から繰り返し検出することで、前記撮影画像内で前記追跡対象物を追跡する追跡部と、を備える対象物追跡装置。
【請求項7】
撮影画像を取得する画像取得ステップと、
前記撮影画像に含まれる検出対象物を検出可能な第一検出方法を用いて、前記撮影画像から前記検出対象物を検出する検出ステップと、
前記撮影画像に含まれる前記検出対象物を検出可能な前記第一検出方法とは異なる第二検出方法を用いて、前記検出ステップで検出された前記検出対象物を追跡対象物として前記撮影画像から繰り返し検出することで、前記撮影画像内で前記追跡対象物を追跡する追跡ステップと、を備える対象物追跡方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、画像から対象物を検出し追跡する対象物追跡システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
画像中から人間の顔をはじめとする物体を検出する技術に、ニューラルネットワークが用いられている。ニューラルネットワークを用いた検出技術は、画像データを学習することで、物体の認識処理を高精度に行うことができる。
【先行技術文献】
【特許文献】
【0003】
特開平6-255388号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ニューラルネットワークの一例としての畳み込みニューラルネットワーク(CNN、Convolutional Neural Network)、ディープニューラルネットワーク(DNN、Deep Neural Network)等が用いられた物体の検出技術は、上述の通り高精度な検出が可能である。しかしながら、計算量が多く、検出までに時間を要する。このため、検出精度及び検出速度が両立できる技術が求められている。特に、物体を継続的に検出することで追跡することが求められる場合には、これらの両立が肝要となる。
【0005】
本開示はこのような事情を考慮してなされたもので、対象物を好適に追跡できる対象物追跡プログラム、対象物追跡装置及びその方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の対象物追跡プログラムは、上述した課題を解決するために、コンピュータに、撮影画像を取得する画像取得手段と、前記撮影画像に含まれる検出対象物を検出可能な第一検出方法を用いて、前記撮影画像から前記検出対象物を検出する検出手段と、前記撮影画像に含まれる前記検出対象物を検出可能な前記第一検出方法とは異なる第二検出方法を用いて、前記検出手段が検出した前記検出対象物を追跡対象物として前記撮影画像から繰り返し検出することで、前記撮影画像内で前記追跡対象物を追跡する追跡手段と、を実行させる。
【0007】
また、本開示の対象物追跡装置は、撮影画像を取得する画像取得部と、前記撮影画像に含まれる検出対象物を検出可能な第一検出方法を用いて、前記撮影画像から前記検出対象物を検出する検出部と、前記撮影画像に含まれる前記検出対象物を検出可能な前記第一検出方法とは異なる第二検出方法を用いて、前記検出部が検出した前記検出対象物を追跡対象物として前記撮影画像から繰り返し検出することで、前記撮影画像内で前記追跡対象物を追跡する追跡部と、を備える。
【0008】
また、本開示の対象物追跡方法は、撮影画像を取得する画像取得ステップと、前記撮影画像に含まれる検出対象物を検出可能な第一検出方法を用いて、前記撮影画像から前記検出対象物を検出する検出ステップと、前記撮影画像に含まれる前記検出対象物を検出可能な前記第一検出方法とは異なる第二検出方法を用いて、前記検出ステップで検出された前記検出対象物を追跡対象物として前記撮影画像から繰り返し検出することで、前記撮影画像内で前記追跡対象物を追跡する追跡ステップと、を備える。
【発明の効果】
【0009】
本開示の対象物追跡プログラム、対象物追跡装置及びその方法においては、対象物を好適に追跡することができる。
【図面の簡単な説明】
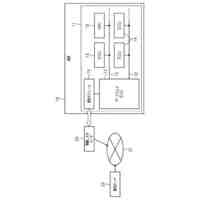
【0010】
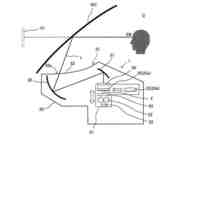
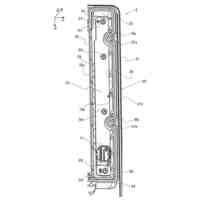
本実施形態における対象物追跡プログラムを実行するHUDを示す図。
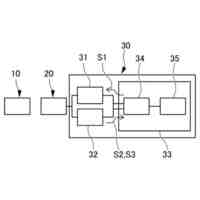
制御部により実行される対象物追跡処理を説明するフローチャート。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
表示装置
7日前
日本精機株式会社
表示装置
22日前
日本精機株式会社
波検出装置
4日前
日本精機株式会社
車載表示機器の電源装置
21日前
日本精機株式会社
ヘッドアップディスプレイ装置
今日
日本精機株式会社
ヘッドアップディスプレイ装置
今日
日本精機株式会社
ヘッドアップディスプレイ装置
1日前
日本精機株式会社
基板収容装置及びその製造方法
1日前
日本精機株式会社
センサユニット及び車載表示装置
1日前
日本精機株式会社
作業支援システム及びプログラム
1日前
日本精機株式会社
信号電源分離回路、信号伝送回路及び車両
今日
日本精機株式会社
表示制御装置、表示システム、及び表示制御方法
今日
日本精機株式会社
表示制御装置、表示システム、及び表示制御方法
今日
日本精機株式会社
対象物追跡プログラム、対象物追跡装置及びその方法
今日
個人
GPSロガー
9日前
個人
情報処理システム
29日前
個人
防災情報システム
1か月前
個人
デトろぐシステム
8日前
個人
管理装置
1日前
日本精機株式会社
表示装置
22日前
個人
指先受の付いたマウス。
25日前
個人
介護者指名システム
1か月前
個人
都市経営シミュレーション
14日前
個人
契約管理サーバ
今日
個人
特徴検討支援システム
1日前
個人
管理装置
3日前
有限会社マイコム
制御盤のAI見積
1か月前
株式会社テクロス
情報処理装置
7日前
個人
支援システム及び支援方法
16日前
キヤノン株式会社
情報処理装置
1か月前
株式会社Haul
採用支援方法
1か月前
國立臺灣大學
操作補助システム
15日前
エムケー精工株式会社
洗車場システム
1か月前
個人
すべて大吉となるおみくじ制作装置
21日前
株式会社野村総合研究所
検証装置
7日前
トヨタ自動車株式会社
車両
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ