TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024134652
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023044953
出願日
2023-03-22
発明の名称
車両制御装置および車両管理システム
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
B60L
50/53 20190101AFI20240927BHJP(車両一般)
要約
【課題】本開示は、作業車両が走行する予定経路の全体で作業車両の電欠状態を防止するとともに、作業効率の低下を抑制可能な車両制御装置を提供する。
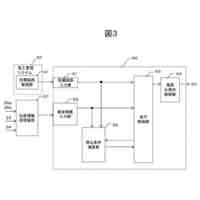
【解決手段】車両制御装置110は、区間情報取得部111と、走行制御部112と、を備える。区間情報取得部111は、作業車両の予定経路の全体で給電装置40が設置されている一つ以上の充電区間の情報と給電装置40が設置されていない一つ以上の非充電区間の情報を含む区間情報を取得する。走行制御部112は、各々の充電区間の終点における蓄電装置17の充電電力量が当該終点を始点とする非充電区間における走行装置18の消費電力量よりも多くなるように走行装置18を制御する。
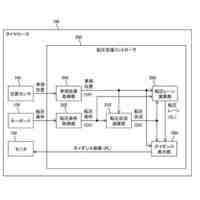
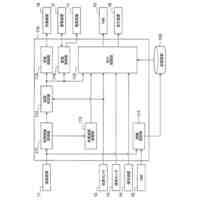
【選択図】図3
特許請求の範囲
【請求項1】
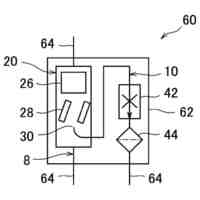
外部の給電装置から電力の供給を受ける受電装置と、該受電装置から供給される電力により充電される蓄電装置と、該蓄電装置または前記受電装置から供給される電力により駆動力を発生させる走行装置と、を備えた作業車両に搭載される車両制御装置であって、
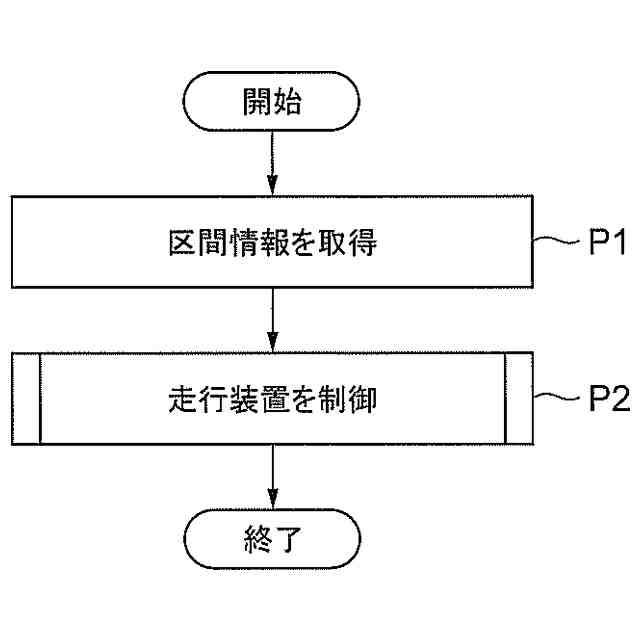
前記作業車両の予定経路内で前記給電装置が設置されている一つ以上の充電区間の情報と前記給電装置が設置されていない一つ以上の非充電区間の情報を含む区間情報を取得する区間情報取得部と、
前記充電区間の終点における前記蓄電装置の充電電力量が当該終点を始点とする前記非充電区間で消費する前記走行装置の消費電力量よりも多くなるように前記走行装置を制御する走行制御部と、を備えることを特徴とする車両制御装置。
続きを表示(約 2,200 文字)
【請求項2】
前記区間情報取得部から取得する前記区間情報に基づいて前記充電電力量が前記消費電力量よりも多くなるように前記充電区間と前記非充電区間における前記作業車両の目標速度を算出する目標速度演算部と、
前記作業車両に搭載された位置センサから入力される前記作業車両の位置情報と、前記区間情報取得部から入力される前記区間情報とに基づいて、前記作業車両が走行中の区間が一つ以上の前記充電区間と一つ以上の前記非充電区間のうちのいずれであるかを判定する区間判定部と、をさらに備え、
前記走行制御部は、前記作業車両に搭載された速度センサから前記作業車両の速度を取得し、前記目標速度演算部によって算出された前記目標速度のうち前記区間判定部によって判定された前記充電区間または前記非充電区間に応じた前記目標速度で前記作業車両を走行させるように前記走行装置を制御することを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記目標速度演算部は、前記予定経路を走行する前記作業車両の走行時間が最短になる前記目標速度を算出することを特徴とする請求項2に記載の車両制御装置。
【請求項4】
前記目標速度演算部は、前記充電区間における前記給電装置から前記蓄電装置への充電速度に基づいて前記充電区間における前記目標速度を算出することを特徴とする請求項2に記載の車両制御装置。
【請求項5】
前記走行制御部は、前記充電区間における前記作業車両の速度の上限を前記充電区間における前記目標速度に制限することを特徴とする請求項2に記載の車両制御装置。
【請求項6】
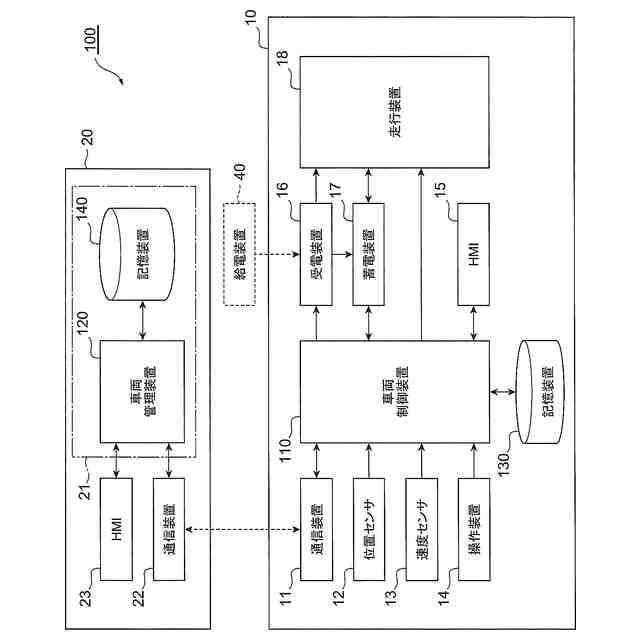
複数の前記作業車両の各々に搭載された請求項1に記載の車両制御装置と、複数の前記作業車両の外部に設置されて複数の前記車両制御装置と通信可能に構成された車両管理装置と、を備えた車両管理システムであって、
前記車両管理装置は、前記車両制御装置へ前記区間情報を送信する区間情報送信部と、前記区間情報に基づいて前記充電電力量が前記消費電力量よりも多くなるように前記充電区間と前記非充電区間における前記作業車両の目標速度を算出して前記車両制御装置へ送信する目標速度演算部と、を備え、
前記車両制御装置は、前記作業車両に搭載された位置センサから入力される前記作業車両の位置情報と、前記区間情報取得部によって取得される前記区間情報とに基づいて、前記作業車両が走行中の区間が一つ以上の前記充電区間と一つ以上の前記非充電区間のうちのいずれであるかを判定する区間判定部をさらに備え、
前記車両制御装置の前記走行制御部は、前記作業車両に搭載された速度センサから前記作業車両の速度を取得し、前記車両管理装置から受信した前記目標速度のうち前記区間判定部によって判定された前記充電区間または前記非充電区間に応じた前記目標速度で前記作業車両を走行させるように前記走行装置を制御することを特徴とする車両管理システム。
【請求項7】
前記車両制御装置は、前記蓄電装置の前記充電電力量を前記車両管理装置へ送信する蓄電制御部をさらに備え、
前記車両管理装置は、前記作業車両が前記非充電区間の始点と終点を通過したときに前記車両制御装置から受信した前記充電電力量に基づいて前記非充電区間における前記作業車両の前記消費電力量を算出する消費電力算出部をさらに備えることを特徴とする請求項6に記載の車両管理システム。
【請求項8】
前記予定経路を走行する複数の前記作業車両の平均速度よりも各々の前記作業車両の速度が低くなる低速区間、または、前記予定経路を走行する複数の前記作業車両の平均消費電力量よりも各々の前記作業車両の消費電力量が小さくなる低消費電力区間に設置された前記給電装置をさらに備えることを特徴とする請求項6に記載の車両管理システム。
【請求項9】
前記予定経路は、前記作業車両が停車して作業を行う作業地点を含み、
前記車両制御装置は、前記蓄電装置の前記充電電力量を前記車両管理装置へ送信する蓄電制御部をさらに備え、
前記車両管理装置の前記目標速度演算部は、前後を走行する2台の前記作業車両のうち先行する前記作業車両が前記作業地点に到達してから後続の前記作業車両が前記作業地点に到達するまでの時間間隔を予測し、該時間間隔と前記後続の前記作業車両の前記車両制御装置から受信した前記充電電力量とに基づいて前記後続の前記作業車両の前記目標速度を修正することを特徴とする請求項6に記載の車両管理システム。
【請求項10】
前記予定経路は、前記作業車両が停車して作業を行う作業地点を含み、
前記車両管理装置の前記目標速度演算部は、前後を走行する2台の前記作業車両のうち先行する前記作業車両が前記作業地点での作業を終えてから後続の前記作業車両が前記作業地点に到達するまでの遅延時間の発生が予測された場合に、前記遅延時間を減少させるように先行する前記作業車両または後続の前記作業車両の前記目標速度を修正することを特徴とする請求項6に記載の車両管理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置および車両管理システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来から電動車両の制御装置に関する発明が知られている(下記特許文献1を参照)。この従来の電動車両の制御装置において、電動車両は、非接触給電が可能な走路である給電レーンを走行しながら、供給された電力を蓄電池に蓄えるように構成されている。この従来の電動車両の制御装置は、電動車両が給電レーンの出口に到達した時点における、蓄電池の蓄電量についての目標値である出口目標蓄電量を予め設定する目標設定部と、電動車両の車速を制御する車速制御部と、を備える。この車速制御部は、電動車両が給電レーンの出口に到達した時点における蓄電量が出口目標蓄電量となるように車速を制御する(特許文献1、第0008段落、請求項1、要約、図4)。
【0003】
このような制御装置では、電動車両が給電レーンの出口に到達した時点における蓄電量、すなわち非接触給電が完了した時点における蓄電量が、目標設定部によって予め設定された出口目標蓄電量に一致するように、給電レーンを走行する電動車両の車速を車速部が制御する。出口目標蓄電量としては、たとえば次の充電可能場所(給電レーンや充電スタンド等)まで走行可能となるような蓄電量や、蓄電装置が満充電となるような蓄電量が設定される。上記のような制御により、電動車両への充電を適切に行うことが可能となる(特許文献1、第0009段落)。
【先行技術文献】
【特許文献】
【0004】
特開2019-068500号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来の電動車両の制御装置は、電動車両を次の充電可能場所まで走行させることは可能である。しかしながら、このような電動車両の制御装置を、たとえば、鉱山や建設現場などの作業現場において積み込み、運搬、および荷降ろしなどの一連の作業を繰り返し行う作業車両に適用した場合には、条件によって作業車両が電欠状態に陥り、作業現場全体の作業効率が低下するおそれがある。
【0006】
本開示は、作業車両が走行する予定経路の全体で作業車両の電欠状態を防止するとともに、作業効率の低下を抑制可能な車両制御装置および車両管理システムを提供する。
【課題を解決するための手段】
【0007】
本開示の一態様は、外部の給電装置から電力の供給を受ける受電装置と、該受電装置から供給される電力により充電される蓄電装置と、該蓄電装置または前記受電装置から供給される電力により駆動力を発生させる走行装置と、を備えた作業車両に搭載される車両制御装置であって、前記作業車両の予定経路の全体で前記給電装置が設置されている一つ以上の充電区間の情報と前記給電装置が設置されていない一つ以上の非充電区間の情報を含む区間情報を取得する区間情報取得部と、各々の前記充電区間の終点における前記蓄電装置の充電電力量が当該終点を始点とする前記非充電区間における前記走行装置の消費電力量よりも多くなるように前記走行装置を制御する走行制御部と、を備えることを特徴とする車両制御装置である。
【発明の効果】
【0008】
本開示の上記一態様によれば、作業車両が走行する予定経路の全体で作業車両の電欠状態を防止するとともに、作業効率の低下を抑制可能な車両制御装置を提供することができる。
【図面の簡単な説明】
【0009】
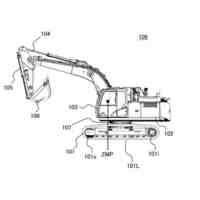
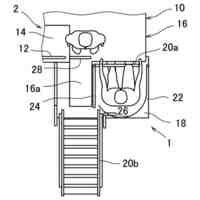
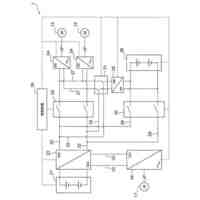
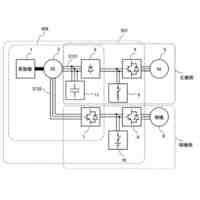
本開示に係る車両管理システムの実施形態1を示す作業現場の概略図。
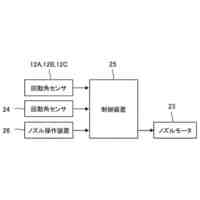
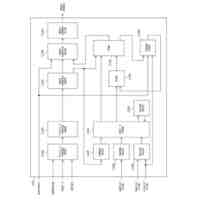
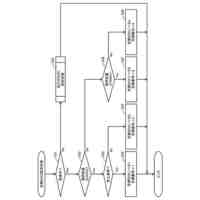
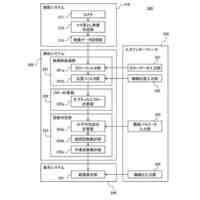
本開示に係る車両管理システムの実施形態1を示すブロック図。
本開示に係る車両制御装置の実施形態1を示す機能ブロック図。
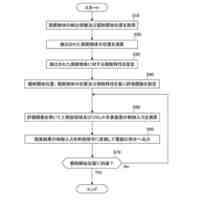
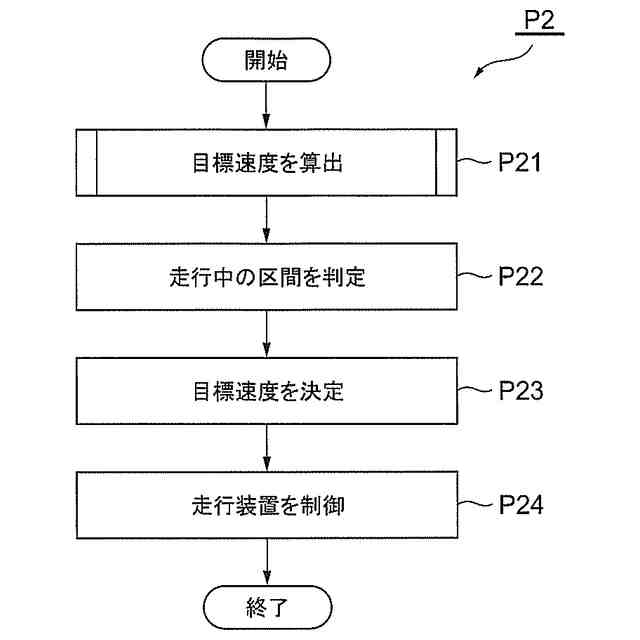
図3に示す車両制御装置の動作を説明するフロー図。
図4に示す走行装置を制御する処理の詳細を説明するフロー図。
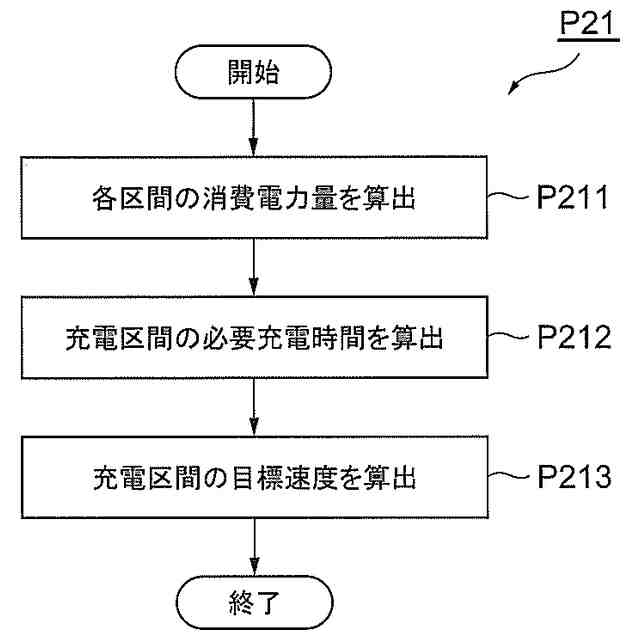
図5に示す目標速度を算出する処理の詳細を示すフロー図。
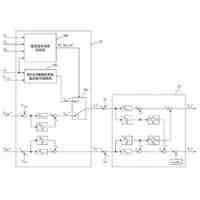
本開示に係る車両制御システムの実施形態2の車両管理装置のブロック図。
実施形態2の車両管理システムの給電装置を設置する場所の例を示す模式図。
本開示に係る車両制御システムの実施形態3の動作を説明するフロー図。
作業車両の予定経路における速度調整区間の一例を示す概略図。
【発明を実施するための形態】
【0010】
以下、図面を参照して本開示に係る車両制御装置および車両管理システムを説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
プラグ
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
6日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
運搬車両
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
建設機械
9日前
日立建機株式会社
作業機械
6日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
6日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
建設機械
2日前
日立建機株式会社
建設機械
6日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
建設機械
3日前
日立建機株式会社
作業車両
6日前
日立建機株式会社
深礎掘削機
1か月前
日立建機株式会社
ダンプトラック
24日前
日立建機株式会社
ダンプトラック
23日前
日立建機株式会社
ダンプトラック
24日前
日立建機株式会社
ダンプトラック
23日前
日立建機株式会社
自律走行システム
1か月前
日立建機株式会社
転圧支援システム
16日前
日立建機株式会社
電気駆動システム
6日前
日立建機株式会社
可変容量型液圧回転機
1か月前
日立建機株式会社
作業機械の周囲監視装置
6日前
日立建機株式会社
建設機械のモニタリングシステム
16日前
日立建機株式会社
誘導発電機を用いた発電システム
5日前
日立建機株式会社
車両制御装置および車両管理システム
2日前
日立建機株式会社
フィルタ装置及びそれを備えた作業機械
6日前
日立建機株式会社
遠隔操作型作業機械システム及び作業機械
1か月前
日立建機株式会社
車両制御システム及びそれを備える運搬車両
16日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ