TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024130288
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023039929
出願日
2023-03-14
発明の名称
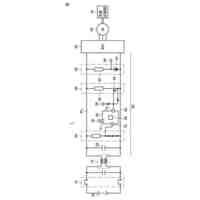
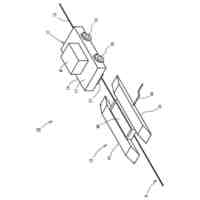
スタッカークレーン式自動倉庫
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B65G
1/04 20060101AFI20240920BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】入出庫の効率を向上することができるスタッカークレーン式自動倉庫を提供する。
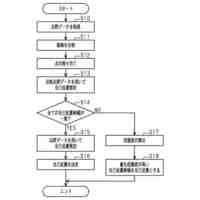
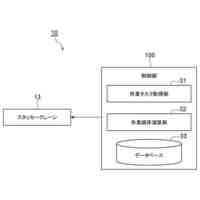
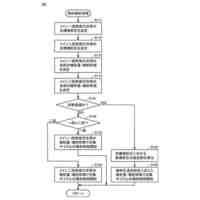
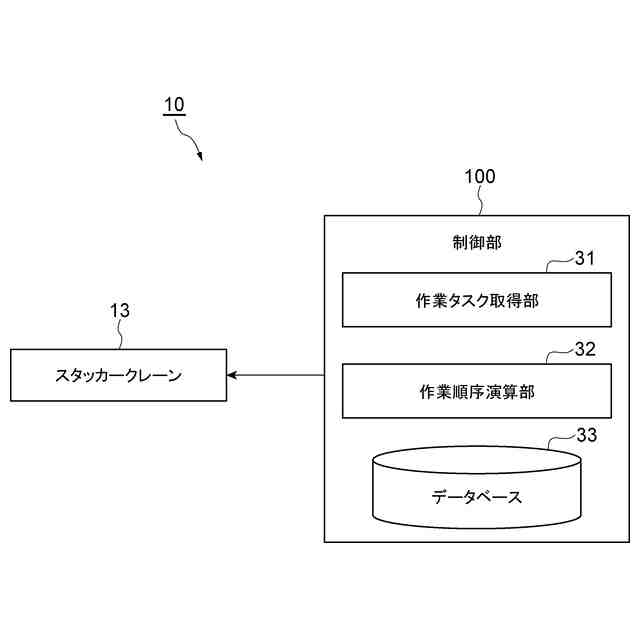
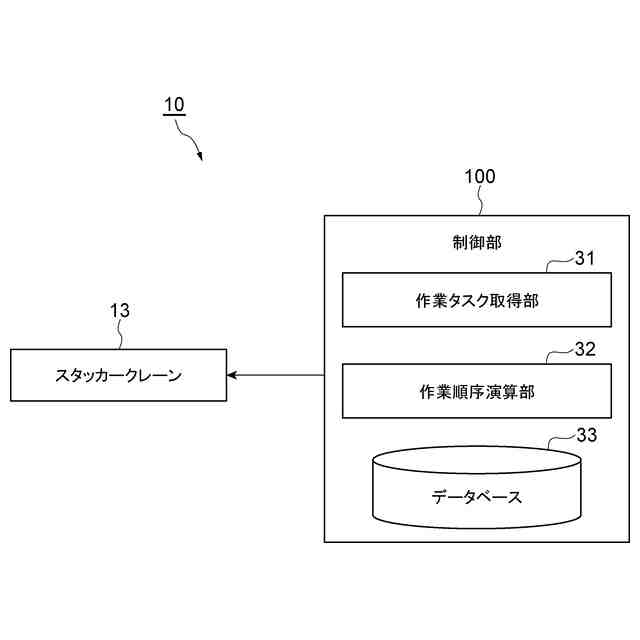
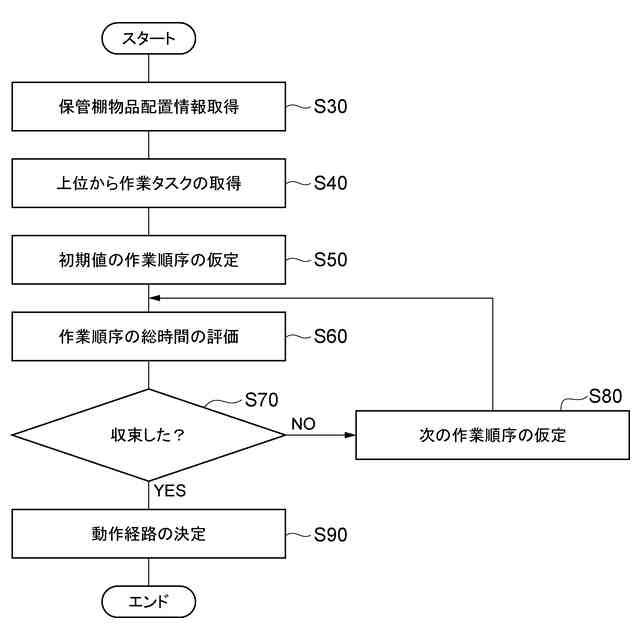
【解決手段】作業順序演算部32は、初期値として仮定した作業順序について、データベースを参照することで、当該作業順序においてスタッカークレーン13が移動する経路の移動時間を把握することができる。これによって、作業順序演算部32は、仮定した作業順序の総時間を評価することができる。作業順序演算部32は、次に仮定した作業順序についての評価を行い、評価結果が良くなれば、更に作業順序を仮定することで、更に搬送効率を向上できる。このように、作業順序演算部32は、評価結果が収束して、それ以上評価が改善しなくなるまで作業順序の仮定を繰り返すことで、移動時間の総時間を低減できるような評価の高い作業順序を探索することができる。
【選択図】図3
特許請求の範囲
【請求項1】
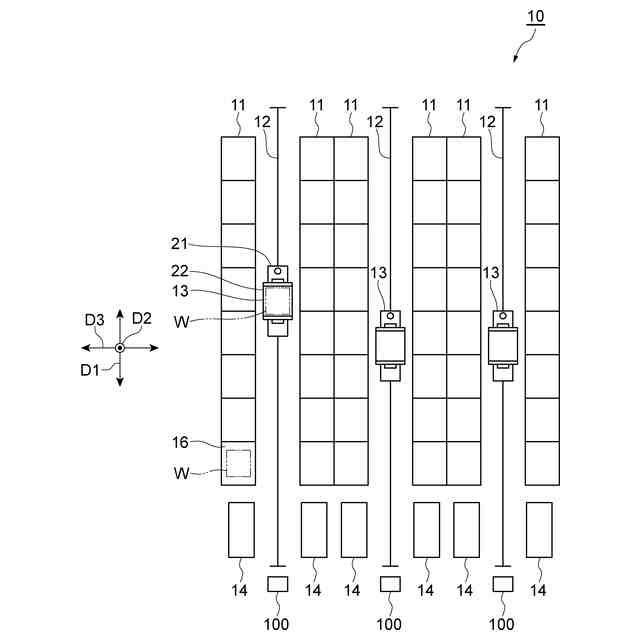
保管される物品の保管位置が区画された保管棚と、
前記保管位置に対して前記物品を搬送する搬送部と、
前記搬送部を制御する制御部と、を備え、
前記制御部は、
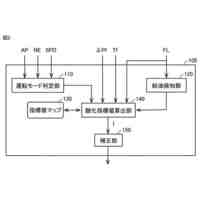
作業タスクを取得する作業タスク取得部と、
前記作業タスクに基づき、前記搬送部の作業順序を演算する作業順序演算部と、
物品の搬送に関わる前記搬送部の移動時間を含むデータベースと、を備え、
前記作業タスク取得部は、前記作業タスクを取得し、
前記作業順序演算部は、
前記作業タスクに基づいて、初期値としての前記搬送部の作業順序を仮定し、
前記データベースを参照することで、仮定した前記作業順序の総時間を評価し、
前記作業順序の仮定を評価結果が収束するまで繰り返し行い、
繰り返しの仮定によって取得された前記作業順序に基づいて、前記搬送部の動作経路を決定する、スタッカークレーン式自動倉庫。
続きを表示(約 190 文字)
【請求項2】
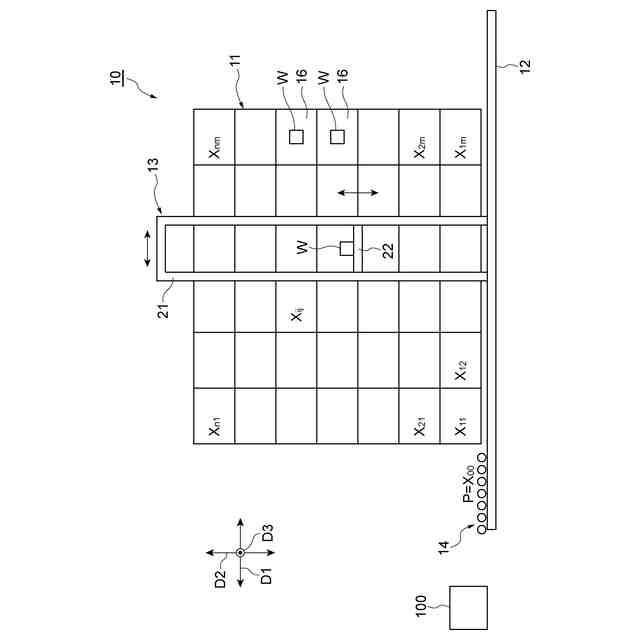
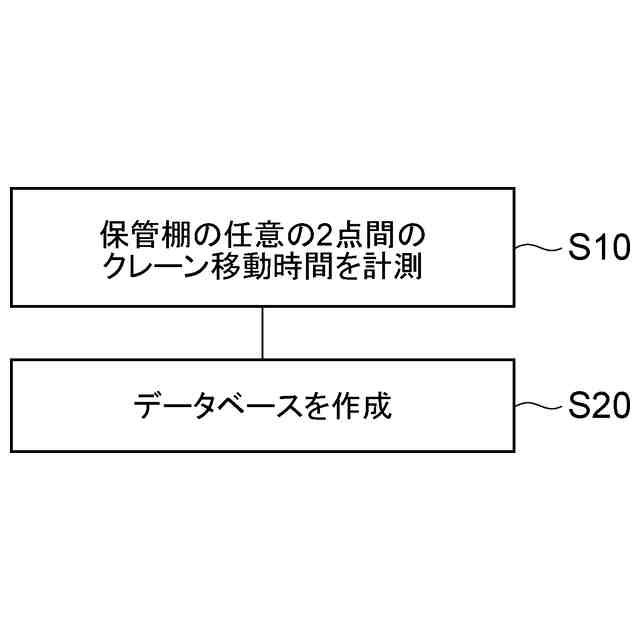
前記データベースは、前記保管棚における任意の二点間の前記搬送部の移動時間を含む、請求項1に記載のスタッカークレーン式自動倉庫。
【請求項3】
前記作業順序演算部は、繰り返しの作業情報を仮定するときにおいて、入庫動作の後は出庫動作を、または出庫動作の後は入庫動作を優先的に仮定する、請求項1又は2に記載のスタッカークレーン式自動倉庫。
発明の詳細な説明
【技術分野】
【0001】
本発明は、スタッカークレーン式自動倉庫に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、スタッカークレーンを用いて物品を保管棚に保管するスタッカークレーン式自動倉庫として、例えば特許文献1に記載されたものが知られている。このスタッカークレーン式自動倉庫は、スタカークレーンの動作経路の候補を複数選定し、それぞれの候補を評価することによって、動作経路を決定している。
【先行技術文献】
【特許文献】
【0003】
特開2001-354308号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上述のようなスタッカークレーン式自動倉庫よりも、入出庫の効率を向上することが求められていた。
【0005】
従って、本発明は、入出庫の効率を向上することができるスタッカークレーン式自動倉庫を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係るスタッカークレーン式自動倉庫は、保管される物品の保管位置が区画された保管棚と、保管位置に対して物品を搬送する搬送部と、搬送部を制御する制御部と、を備え、制御部は、作業タスクを取得する作業タスク取得部と、作業タスクに基づき、搬送部の作業順序を演算する作業順序演算部と、物品の搬送に関わる搬送部の移動時間を含むデータベースと、を備え、作業タスク取得部は、作業タスクを取得し、作業順序演算部は、作業タスクに基づいて、初期値としての搬送部の作業順序を仮定し、データベースを参照することで、仮定した作業順序の総時間を評価し、作業順序の仮定を評価結果が収束するまで繰り返し行い、繰り返しの仮定によって取得された作業順序に基づいて、搬送部の動作経路を決定する。
【0007】
制御部の作業タスク取得部は、作業タスクを取得し、作業順序演算部は、作業タスクに基づいて、初期値としての搬送部の作業順序を仮定する。まず、作業順序演算部は、初期値として仮定した作業順序について、データベースを参照することで、当該作業順序において搬送部が移動する経路の移動時間を把握することができる。これによって、作業順序演算部は、仮定した作業順序の総時間を評価することができる。作業順序演算部は、次に仮定した作業順序についての評価を行い、評価結果が良くなれば、更に次の作業順序を仮定してゆくことで、搬送効率を向上できる。このように、作業順序演算部は、評価結果が収束して、それ以上評価が改善しなくなるまで作業順序の仮定を繰り返すことで、移動時間の総時間を低減できるような評価の高い作業順序を探索することができる。以上より、搬送効率を向上することができる。
【0008】
データベースは、保管棚における任意の二点間の搬送部の移動時間を含んでよい。子の場合、作業順序演算部は、仮定した作業順序の中で、二点間の移動経路を設定すれば、データベースを照会することで、設定した移動経路の移動時間を速やかに取得することができる。これより、作業順序演算部は、仮定した作業順序を容易に評価することができる。
【0009】
作業順序演算部は、繰り返しの作業情報を仮定するときにおいて、入庫動作の後は出庫動作を、または出庫動作の後は入庫動作を優先的に仮定してよい。入庫動作の後は搬送部は保管棚側において空になるため、そのまま他の保管位置へ移動して物品の出庫動作を行うことで、効率よく出庫動作を行うことができる。出庫動作の後は搬送部は入出庫位置側において空になるため、そのまま入庫用の物品を移載して、入庫動作を行うことで、効率よく入庫動作を行うことができる。
【発明の効果】
【0010】
本発明によれば、入出庫の効率を向上することができるスタッカークレーン式自動倉庫を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
ロータ
今日
株式会社豊田自動織機
圧縮機
今日
株式会社豊田自動織機
圧縮機
今日
株式会社豊田自動織機
圧縮機
今日
株式会社豊田自動織機
圧縮機
今日
株式会社豊田自動織機
圧縮機
今日
株式会社豊田自動織機
電動圧縮機
今日
株式会社豊田自動織機
電動圧縮機
1日前
株式会社豊田自動織機
無人走行体
1日前
株式会社豊田自動織機
電動圧縮機
今日
株式会社豊田自動織機
自己位置推定装置
11日前
株式会社豊田自動織機
車両用デッキ装置
1日前
株式会社豊田自動織機
内燃機関の制御装置
1日前
株式会社豊田自動織機
ウェザーストリップ
11日前
株式会社豊田自動織機
車載用電力変換装置
今日
株式会社豊田自動織機
産業車両の制動制御装置
1日前
株式会社豊田自動織機
スタッカークレーン式自動倉庫
1日前
株式会社豊田自動織機
放電装置及び電動コンプレッサ
7日前
株式会社豊田自動織機
無人走行体の走行制御システム
1日前
株式会社豊田自動織機
内燃機関の制御装置および制御方法
1日前
トヨタ自動車株式会社
電池モジュール
4日前
株式会社豊田自動織機
内燃機関の制御装置および内燃機関の制御方法
7日前
株式会社オティックス
ターボチャージャ用のコンプレッサ
11日前
株式会社豊田中央研究所
二酸化炭素回収システム、二酸化炭素循環システム、および、二酸化炭素回収方法
1日前
個人
包装体
1日前
個人
構造体
6か月前
個人
収納用具
3か月前
個人
物品収納具
3か月前
個人
折り畳み水槽
今日
個人
ダンボール宝箱
7日前
個人
掃除楽々ゴミ箱
4か月前
個人
開封用カッター
5か月前
個人
チャック付き袋体
6か月前
個人
パウチ容器
6か月前
個人
圧縮収納袋
11日前
個人
折りたたみコップ
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ