TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024130721
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023040604
出願日
2023-03-15
発明の名称
無人走行体の走行制御システム
出願人
株式会社豊田自動織機
代理人
主分類
H02J
50/90 20160101AFI20240920BHJP(電力の発電,変換,配電)
要約
【課題】無人走行体が給電コイルの磁界を検出するためのセンサを必要とせず、しかも、走行経路を変更し易い無人走行体の走行制御システムの提供にある。
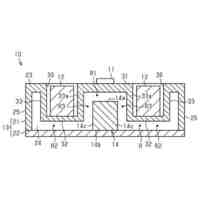
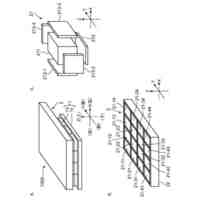
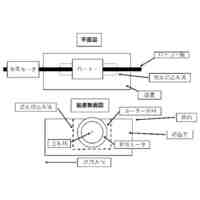
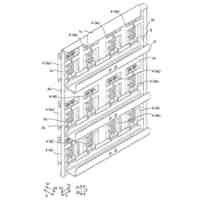
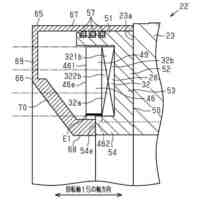
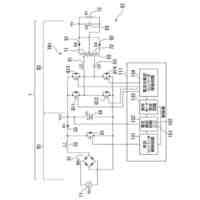
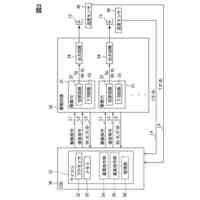
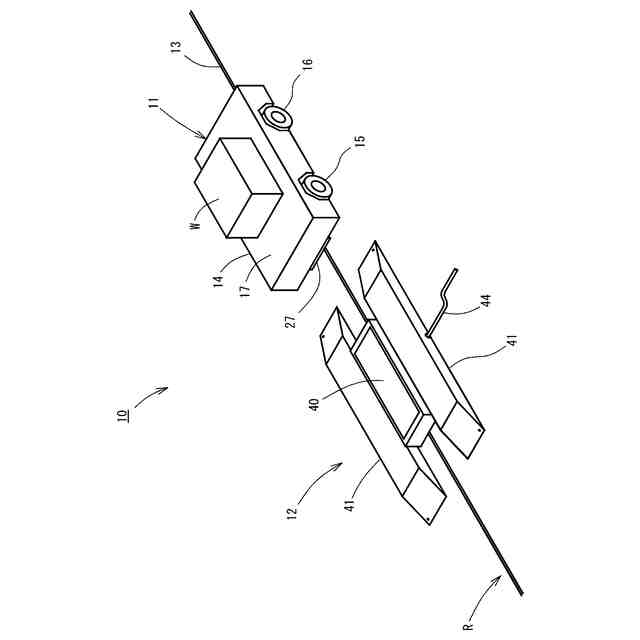
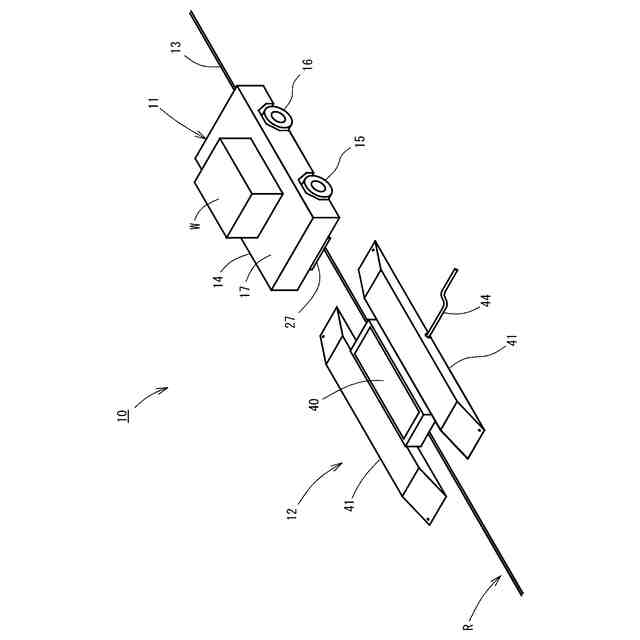
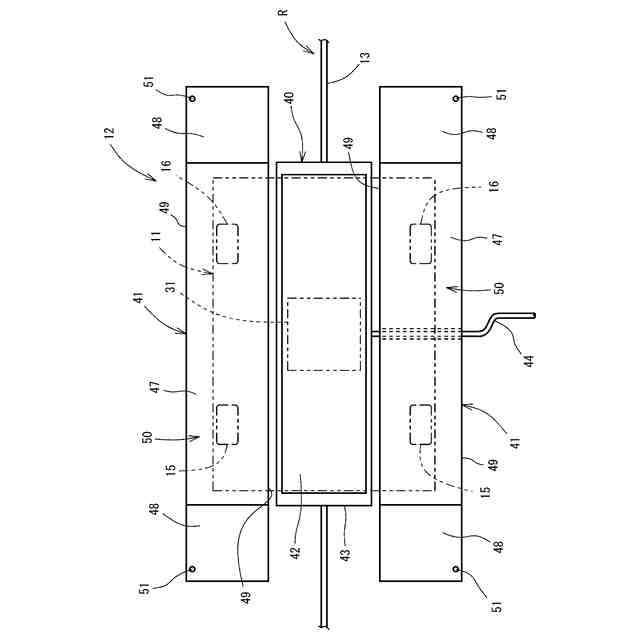
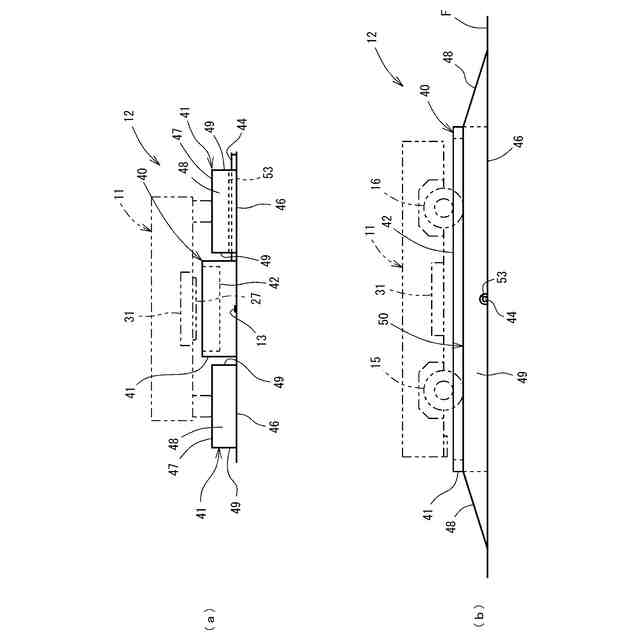
【解決手段】受電コイルを有する無人搬送車11と、給電コイル42を備え、給電コイル42から受電コイルへ非接触で給電を行う非接触給電装置12と、を有する無人搬送車11の非接触給電システム10において、非接触給電装置は、給電コイル42を保持し、路面に設置可能な給電モジュール40と、給電モジュール40を挟んで路面に並設され、無人搬送車11を案内する一対のガイドモジュール41と、を有し、給電モジュール40は、一方のガイドモジュール41を通過して外部電源と接続される給電ケーブル44を備えた。
【選択図】 図1
特許請求の範囲
【請求項1】
受電コイルを有する無人走行体と、
給電コイルを備え、前記給電コイルから前記受電コイルへ非接触で給電を行う非接触給電装置と、を有する無人走行体の走行制御システムにおいて、
前記非接触給電装置は、
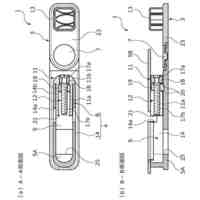
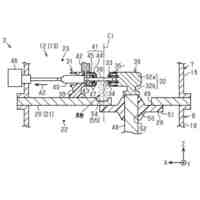
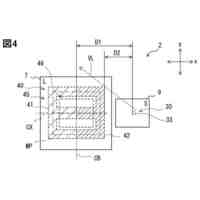
前記給電コイルを保持し、路面に設置可能な給電モジュールと、
前記給電モジュールを挟んで前記路面に並設され、前記無人走行体を案内する一対のガイドモジュールと、を有し、
前記給電モジュールは、一方の前記ガイドモジュールを通過して外部電源と接続される給電ケーブルを備えることを特徴とする無人走行体の走行制御システム。
続きを表示(約 670 文字)
【請求項2】
前記無人走行体は、
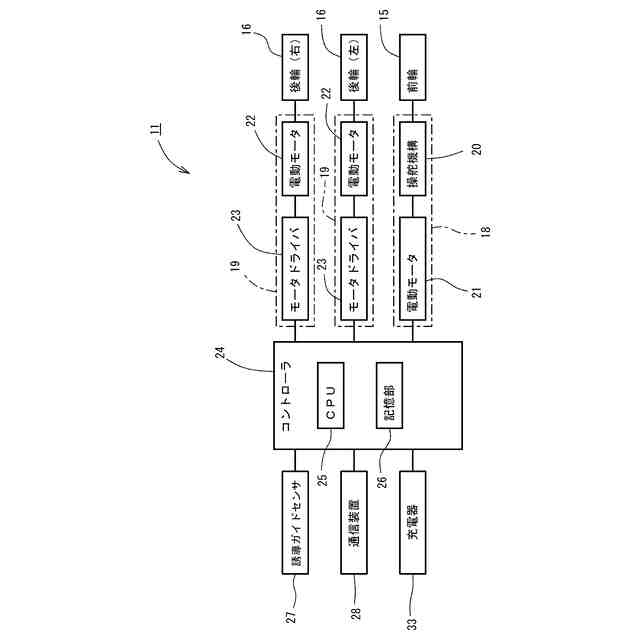
駆動輪と、
前記駆動輪を駆動する走行駆動部と、
前記走行駆動部を制御するコントローラと、を有し、
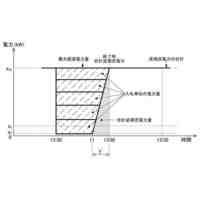
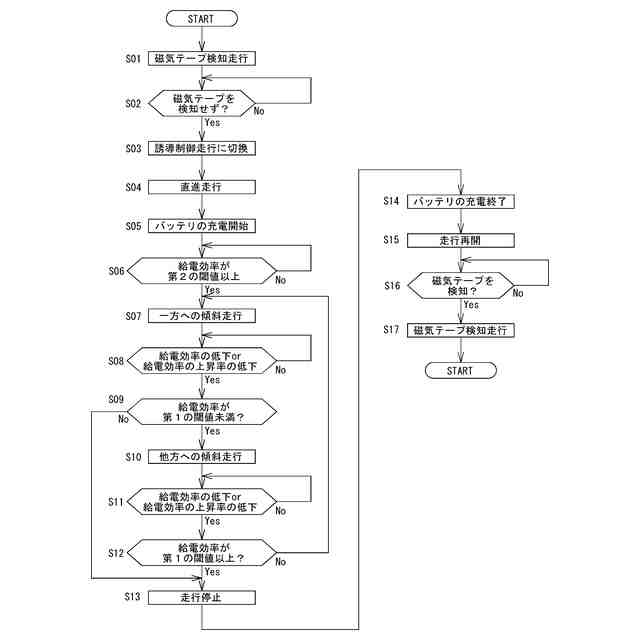
前記コントローラは、前記給電コイルによる前記受電コイルに対する非接触給電が開始され、非接触給電の給電効率が第1の閾値を超えるとき、前記無人走行体を停車するように前記走行駆動部を制御することを特徴とする請求項1記載の無人走行体の走行制御システム。
【請求項3】
前記無人走行体は、
操舵輪と、
前記コントローラにより制御され、前記操舵輪を制御する操舵部と、を有し、
前記コントローラは、前記給電コイルによる前記受電コイルに対する非接触給電が開始され、前記給電効率が前記第1の閾値よりも小さく設定されている第2の閾値以上のとき、前記無人走行体の進路が走行経路に対して一方へ向けて傾斜するように前記操舵部を制御し、
傾斜して走行したときの前記給電効率の上昇率が鈍化するか、傾斜して走行したときの前記給電効率が低下するとき、他方へ向けて傾斜するように前記操舵部を制御することを特徴とする請求項2記載の無人走行体の走行制御システム。
【請求項4】
前記無人走行体は、前記路面に設置された誘導線を検出する誘導線検出センサを有し、
前記コントローラは、前記誘導線検出センサによる前記誘導線の検出により前記給電モジュールへ向けて前記無人走行体を誘導することを特徴とする請求項2又は3記載の無人走行体の走行制御システム。
発明の詳細な説明
【技術分野】
【0001】
この発明は、無人走行体の走行制御システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
無人走行体の走行制御システムに関係する従来技術として、例えば、特許文献1に開示された非接触充電用送電装置および電動車両の走行制御システムが知られている。特許文献1に開示された電動車両の走行制御システムは、非接触充電用送電装置と、電動車両に搭載され、送電コイルの磁界を検出するセンサと、制御装置と、を備える。送電コイルが埋め込まれた床材は、走行路に沿って複数設けられ、制御装置は、センサにより検出された磁界に基づき電動車両を走行路に沿って自動走行させる。非接触充電用送電装置は、受電コイルを搭載した電動車両の走行路に配置される送電コイルと、送電コイルに電力を供給するための給電線とを備える。
【先行技術文献】
【特許文献】
【0003】
特開2014-236539号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された電動車両の走行制御システムは、床材に送電コイルを埋め込む必要があるという問題がある。このため、送電コイルが埋め込まれた床材を施工すると、電動車両の走行路を容易に変更することができない。また、電動車両は、送電コイルに沿って電動車両を誘導するために送電コイルの磁界を検出する磁界検出センサを必要とする。
【0005】
本発明は上記の問題点に鑑みてなされたもので、本発明の目的は、無人走行体が給電コイルの磁界を検出するためのセンサを必要とせず、しかも、走行経路を変更し易い無人走行体の走行制御システムの提供にある。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明は、受電コイルを有する無人走行体と、給電コイルを備え、前記給電コイルから前記受電コイルへ非接触で給電を行う非接触給電装置と、を有する無人走行体の走行制御システムにおいて、前記非接触給電装置は、前記給電コイルを保持し、路面に設置可能な給電モジュールと、前記給電モジュールを挟んで前記路面に並設され、前記無人走行体を案内する一対のガイドモジュールと、を有し、前記給電モジュールは、一方の前記ガイドモジュールを通過して外部電源と接続される給電ケーブルを備えることを特徴とする。
【0007】
本発明では、給電モジュールが路面に設置され、一対のガイドモジュールが給電モジュールを間にして並設されている。給電モジュールの給電ケーブルは、一対のガイドモジュールの一方のガイドモジュールを通過して外部電源と接続される。このため、無人走行体は、非接触給電を行う場合、ガイドモジュール上を走行して給電モジュールと接近することで非接触給電を開始する。路面に設置される給電モジュールは、路面に埋め込む必要がなく、設置位置を簡単に移動できるので走行経路を変更し易い。
【0008】
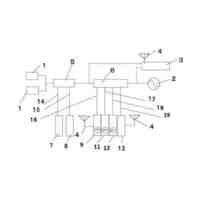
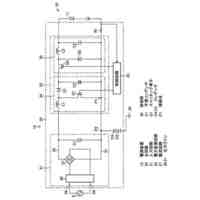
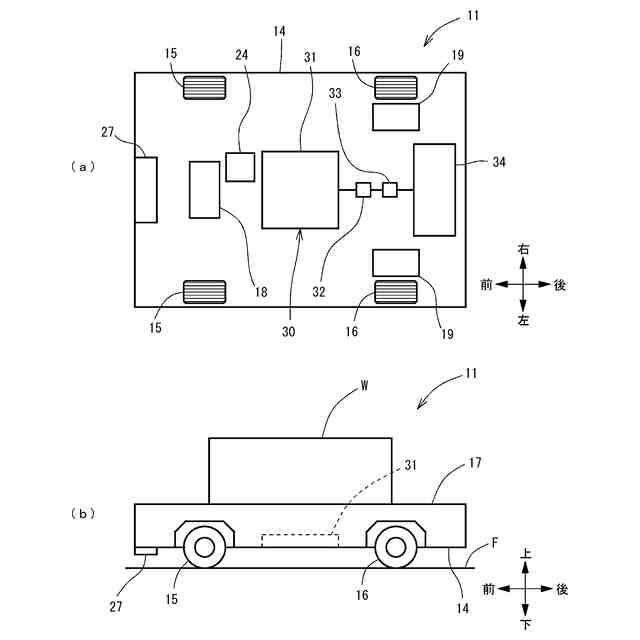
また、上記の無人走行体の走行制御システムにおいて、前記無人走行体は、駆動輪と、前記駆動輪を駆動する走行駆動部と、前記走行駆動部を制御するコントローラと、を有し、前記コントローラは、前記給電コイルによる前記受電コイルに対する非接触給電が開始され、非接触給電の給電効率が第1の閾値を超えるとき、前記無人走行体を停車するように前記走行駆動部を制御することを特徴とする構成としてもよい。
この場合、受電コイルに対する非接触給電が開始され、非接触給電の給電効率が第1の閾値を超えるとき、無人走行体は停車される。このため、停車した無人走行体に対して給電効率が第1の閾値を超える状態で非接触給電を行うことができる。
【0009】
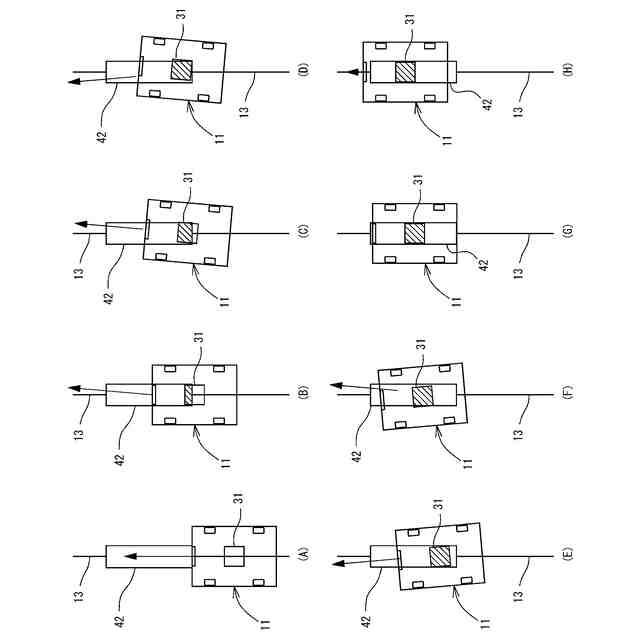
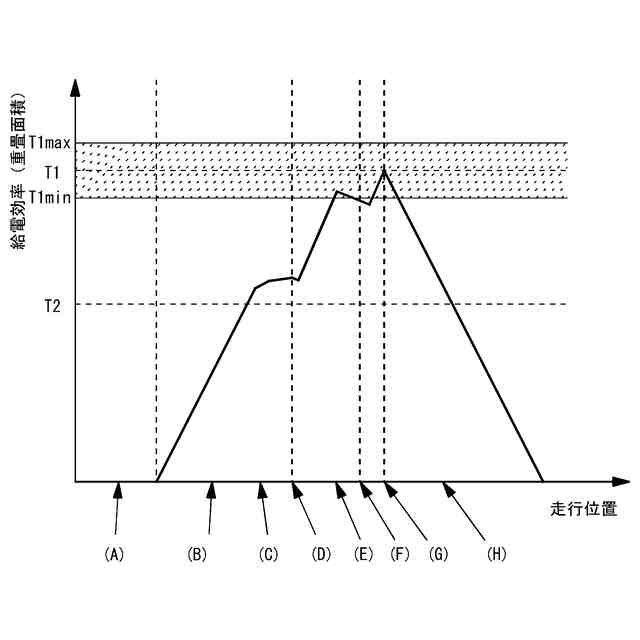
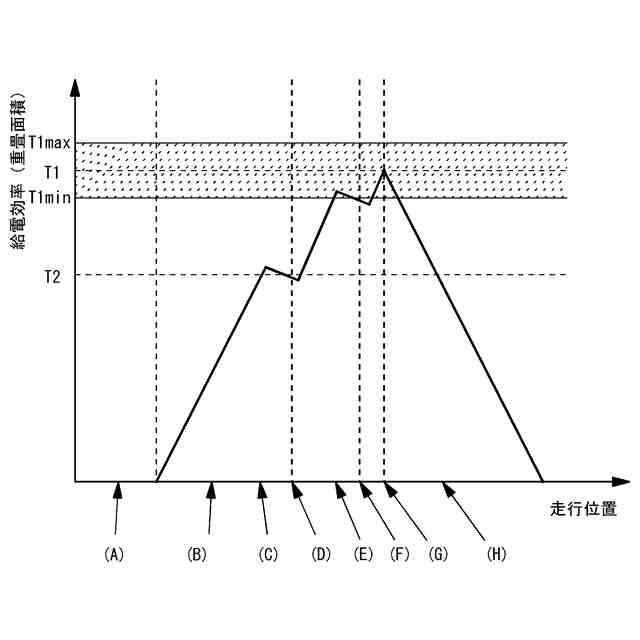
また、上記の無人走行体の走行制御システムにおいて、前記無人走行体は、操舵輪と、前記コントローラにより制御され、前記操舵輪を制御する操舵部と、を有し、前記コントローラは、前記給電コイルによる前記受電コイルに対する非接触給電が開始され、前記給電効率が前記第1の閾値よりも小さく設定されている第2の閾値以上のとき、前記無人走行体の進路が走行経路に対して一方へ向けて傾斜するように前記操舵部を制御し、傾斜して走行したときの前記給電効率の上昇率が鈍化するか、傾斜して走行したときの前記給電効率が低下するとき、他方へ向けて傾斜するように前記操舵部を制御する構成としてもよい。
この場合、給電コイルによる受電コイルに対する非接触給電が開始され、給電効率が第2の閾値を超えるとき、無人走行体は走行経路に対して一方へ向けて傾斜して走行するので、給電効率の上昇率が低下するか、あるいは給電効率が低下する。傾斜して走行したときの給電効率の上昇率が閾値以下であるか、傾斜して走行したときの給電効率が第1の閾値以下であるとき、無人搬送車は他方へ向けて傾斜して走行する。このため、一方および他方へ傾斜する走行を行うことで、給電コイルの磁界を検出するセンサを必要とすることなく、給電効率の変動に基づいてより給電効率の高い給電位置へ無人搬送車を誘導することができる。
【0010】
また、上記の無人走行体の走行制御システムにおいて、前記無人走行体は、前記路面に設置された誘導線を検出する誘導線検出センサを有し、前記コントローラは、前記誘導線検出センサによる前記誘導線の検出により前記給電モジュールへ向けて前記無人走行体を誘導する構成としてもよい。
この場合、誘導線検出センサによる誘導線の検出により給電モジュールへ向けて無人走行体を誘導するが、誘導線の上に給電モジュールを設置することが可能である。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
電子機器
4日前
株式会社豊田自動織機
フォイル軸受
4日前
株式会社豊田自動織機
車両用衝撃吸収体
4日前
個人
モータ
18日前
個人
総反回転復動発電器
7日前
個人
回転装置のハルバッハ磁石配列
5日前
株式会社神戸製鋼所
電動機
19日前
株式会社神戸製鋼所
電動機
4日前
神保電器株式会社
配線器具取付枠
18日前
個人
太陽光発電電力活用プラットフォーム
18日前
住友電装株式会社
電気接続箱
18日前
個人
路面走行車両を利用した発電システム
19日前
矢崎総業株式会社
蓄電システム
19日前
株式会社ダイヘン
電力システム
18日前
株式会社ダイヘン
電力システム
4日前
富士電機株式会社
電力変換装置
18日前
東芝ライテック株式会社
電源装置
22日前
株式会社豊田自動織機
電動圧縮機
4日前
株式会社ミツバ
電動モータ
11日前
TDK株式会社
電力変換装置
4日前
システムカワバタ有限会社
コード収納装置
12日前
日新電機株式会社
ガス絶縁開閉装置
22日前
株式会社ダイヘン
無効電力補償装置
4日前
株式会社デンソー
電力制御装置
5日前
株式会社デンソー
電力変換装置
18日前
大阪瓦斯株式会社
電力調達装置
18日前
日立Astemo株式会社
電子制御装置
4日前
株式会社アイシン
車両用駆動装置
4日前
株式会社ミツバ
モータ
22日前
株式会社TMEIC
無効電力補償装置
4日前
テルモ株式会社
保護回路及び電子機器
5日前
大和ハウス工業株式会社
電力融通システム
18日前
富士電機機器制御株式会社
過負荷保護装置
18日前
株式会社ワィティー
アキシャルギャップ誘導モータ
4日前
トヨタ自動車株式会社
サーバ
4日前
株式会社デンソー
モータ
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ