TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024127468
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023036639
出願日
2023-03-09
発明の名称
自己位置推定装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G01C
21/30 20060101AFI20240912BHJP(測定;試験)
要約
【課題】自己位置推定精度を向上させること。
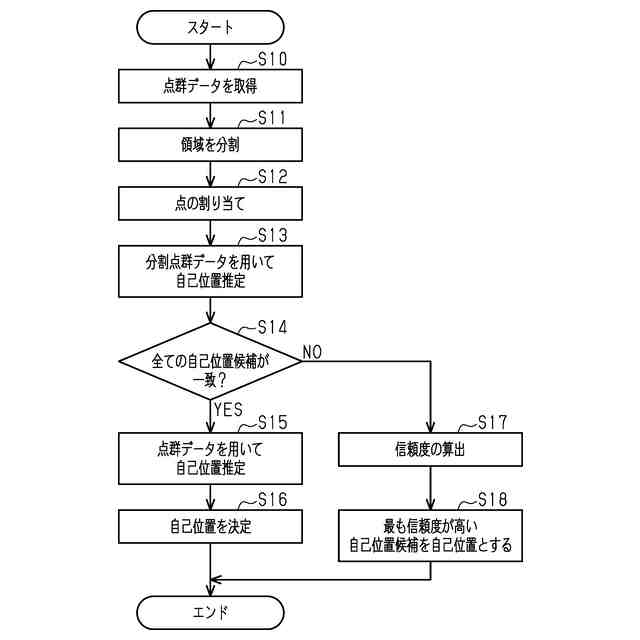
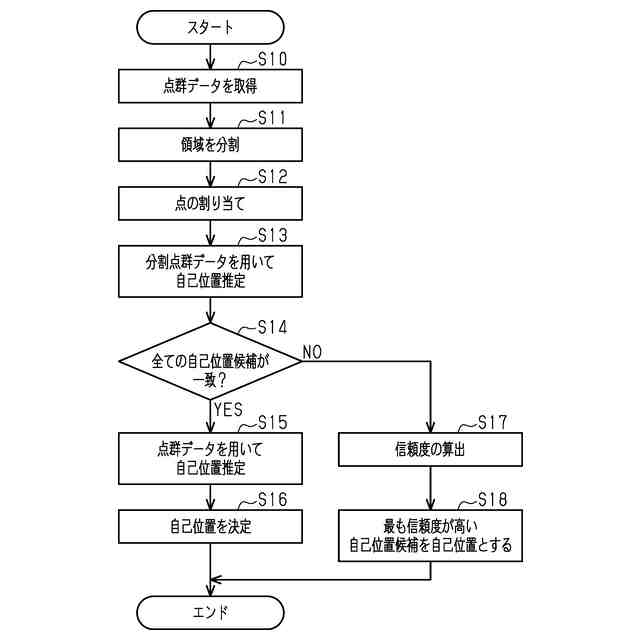
【解決手段】制御装置は、センサから点群データを取得する。制御装置は、ローカル座標系で表される領域を分割する。制御装置は、分割点群データと地図データとの照合によって自己位置候補を推定する。制御装置は、分割点群データ毎に推定された全ての自己位置候補が互いに一致するか否かを判定する。判定の結果、全ての自己位置候補が一致する場合、制御装置は、当該自己位置候補に基づいて自己位置を決定する。判定の結果、少なくとも1つの自己位置候補が一致しない場合、制御装置は、自己位置候補毎に点群データと地図データとの照合によって信頼度を算出し、信頼度が最も高い自己位置候補を自己位置とする。
【選択図】図3
特許請求の範囲
【請求項1】
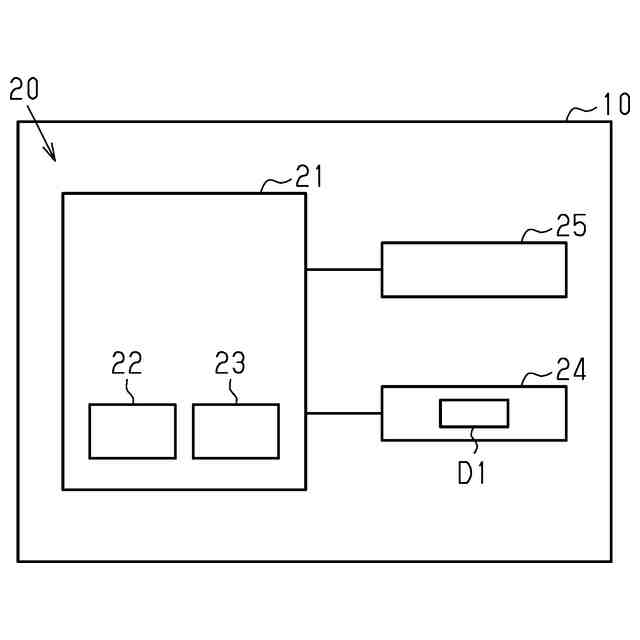
移動体の自己位置を推定する自己位置推定装置であって、
前記移動体が用いられる環境をグローバル座標系での座標で表した地図データを記憶する記憶装置と、
前記移動体の周辺環境をローカル座標系での座標を表す点として検出するセンサと、
制御装置と、を備え、
前記制御装置は、
前記センサから前記点の集合である点群データを取得し、
前記ローカル座標系で表される領域を複数の分割領域に分割し、
前記分割領域のそれぞれに当該分割領域に含まれる前記点を割り当て、
前記分割領域のそれぞれに割り当てられた前記点の集合である分割点群データ毎に前記地図データとの照合によって自己位置候補を推定し、
前記分割点群データ毎に推定された全ての前記自己位置候補が互いに一致するか否かを判定し、
前記判定の結果、全ての前記自己位置候補が一致する場合、当該自己位置候補に基づいて前記自己位置を決定し、
前記判定の結果、少なくとも1つの前記自己位置候補が一致しない場合、前記自己位置候補毎に前記点群データと前記地図データとの照合によって信頼度を算出し、前記信頼度が最も高い前記自己位置候補を前記自己位置とする、自己位置推定装置。
続きを表示(約 130 文字)
【請求項2】
前記制御装置は、前記判定の結果、全ての前記自己位置候補が一致する場合、当該自己位置候補に前記移動体が位置していると仮定して前記点群データと前記地図データとの照合を行うことによって前記自己位置を推定する、請求項1に記載の自己位置推定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自己位置推定装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1に開示の自己位置推定装置は、移動体の仮の自己位置を推定する。自己位置推定装置は、仮の自己位置からセンサが点群データを取得可能な範囲を算出する。そして、自己位置推定装置は、地図データのうちセンサが点群データを取得可能な範囲と点群データとの照合によって自己位置を推定する。これにより、自己位置推定精度を向上させている。
【先行技術文献】
【特許文献】
【0003】
特開2022-26832号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の自己位置推定装置であっても、推定した自己位置と移動体の実際の位置とに乖離が生じる場合がある。
【課題を解決するための手段】
【0005】
上記課題を解決する自己位置推定装置は、移動体の自己位置を推定する自己位置推定装置であって、前記移動体が用いられる環境をグローバル座標系での座標で表した地図データを記憶する記憶装置と、前記移動体の周辺環境をローカル座標系での座標を表す点として検出するセンサと、制御装置と、を備え、前記制御装置は、前記センサから前記点の集合である点群データを取得し、前記ローカル座標系で表される領域を複数の分割領域に分割し、前記分割領域のそれぞれに当該分割領域に含まれる前記点を割り当て、前記分割領域のそれぞれに割り当てられた前記点の集合である分割点群データ毎に前記地図データとの照合によって自己位置候補を推定し、前記分割点群データ毎に推定された全ての前記自己位置候補が互いに一致するか否かを判定し、前記判定の結果、全ての前記自己位置候補が一致する場合、当該自己位置候補に基づいて前記自己位置を決定し、前記判定の結果、少なくとも1つの前記自己位置候補が一致しない場合、前記自己位置候補毎に前記点群データと前記地図データとの照合によって信頼度を算出し、前記信頼度が最も高い前記自己位置候補を前記自己位置とする。
【0006】
制御装置は、分割点群データ毎に自己位置候補を推定する。全ての自己位置候補が一致する場合、当該自己位置候補の精度は高いとみなすことができる。従って、制御装置は、自己位置推定候補に基づいて自己位置を決定することができる。制御装置は、少なくとも1つの自己位置候補が一致しない場合、自己位置候補毎に点群データと地図データとの照合によって信頼度を算出する。制御装置は、信頼度が最も高い自己位置候補を自己位置とする。これにより、自己位置推定精度を向上させることができる。
【0007】
上記自己位置推定装置について、前記制御装置は、前記判定の結果、全ての前記自己位置候補が一致する場合、当該自己位置候補に前記移動体が位置していると仮定して前記点群データと前記地図データとの照合を行うことによって前記自己位置を推定してもよい。
【発明の効果】
【0008】
本発明によれば、自己位置推定精度を向上させることができる。
【図面の簡単な説明】
【0009】
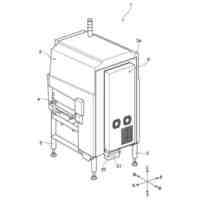
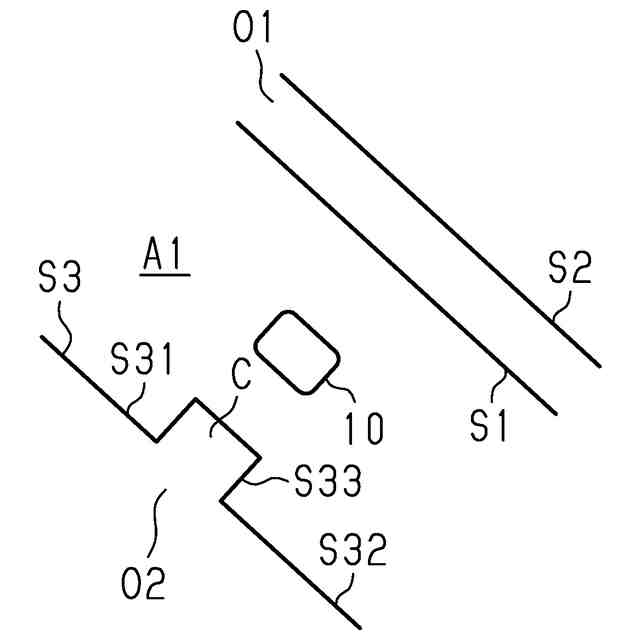
移動体が用いられる環境の模式図である。
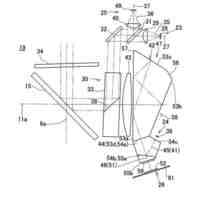
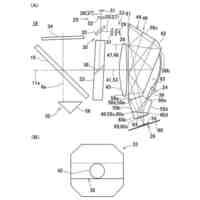
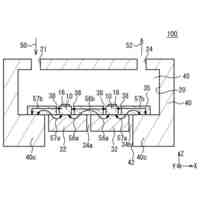
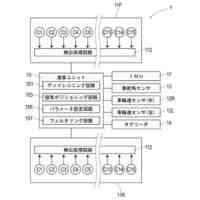
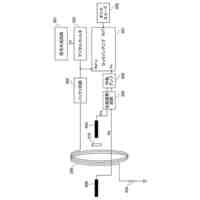
図1の移動体の概略構成図である。
図2の制御装置が実行する自己位置推定制御を示すフローチャートである。
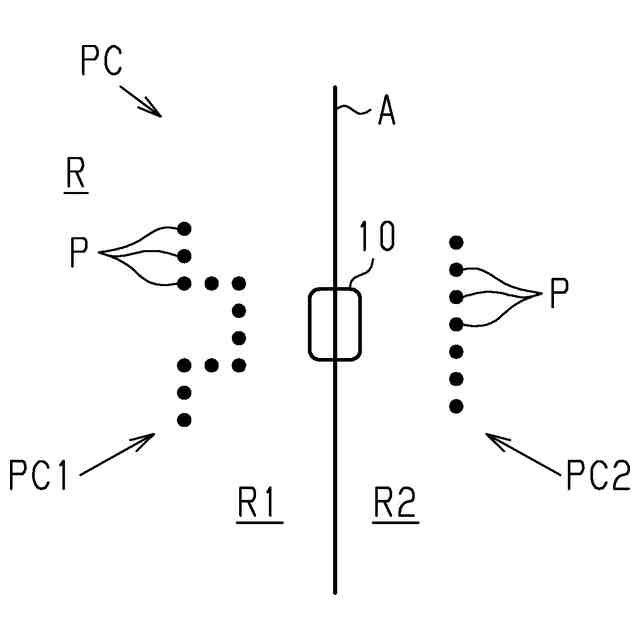
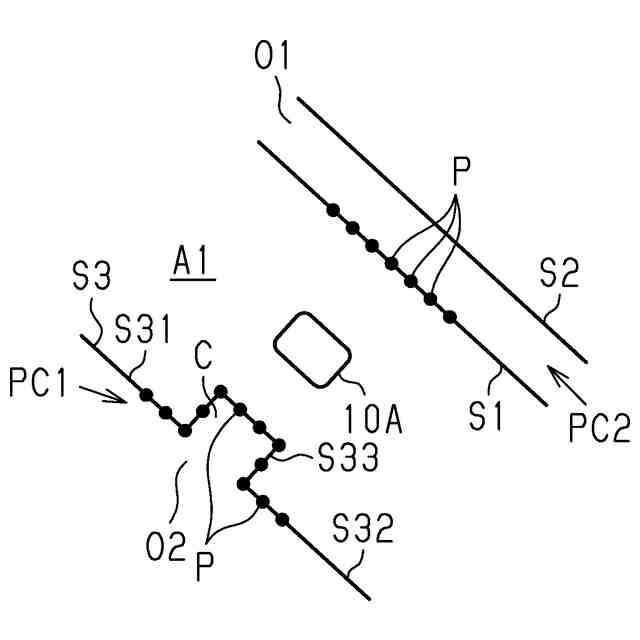
図3の自己位置推定制御で得られた分割点群データの一例を示す図である。
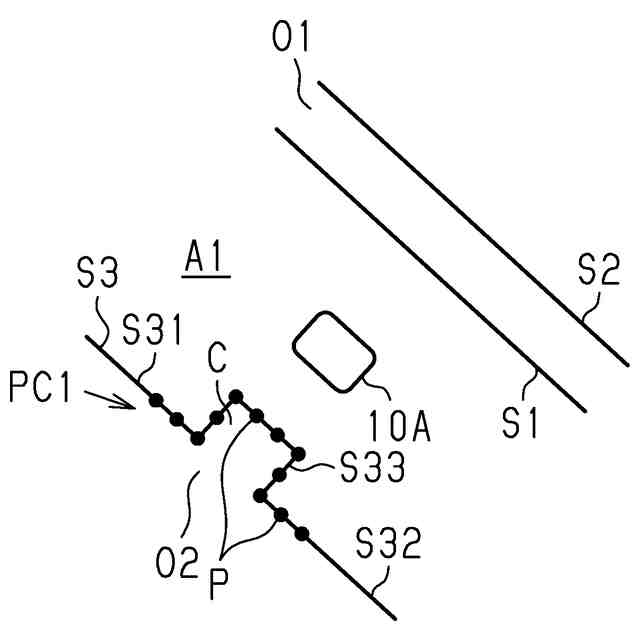
図3の自己位置推定制御で得られた第1自己位置候補の一例を示す図である。
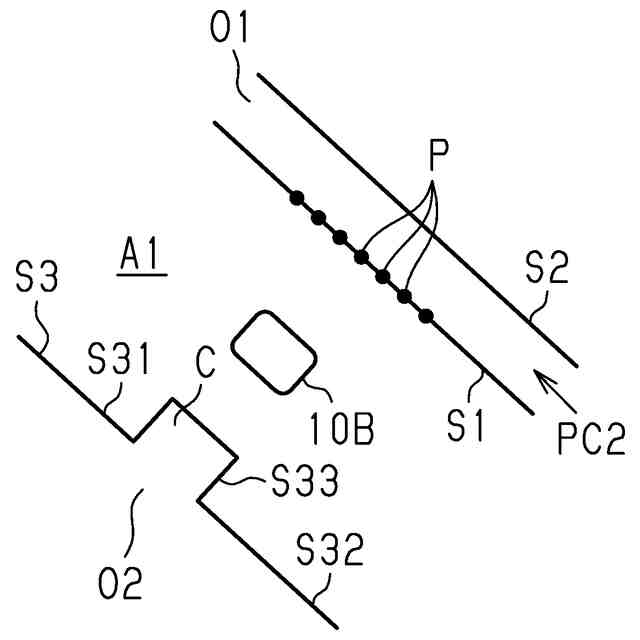
図3の自己位置推定制御で得られた第2自己位置候補の一例を示す図である。
図3の自己位置推定制御で得られた第2自己位置候補の一例を示す図である。
図5に示す第1自己位置候補に移動体が位置していると仮定して点群データと地図データとの照合を行った結果を示す図である。
図7に示す第2自己位置候補に移動体が位置していると仮定して点群データと地図データとの照合を行った結果を示す図である。
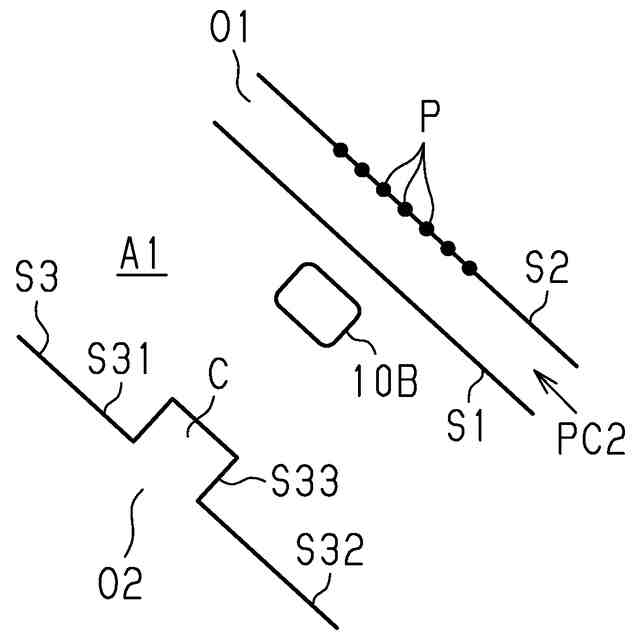
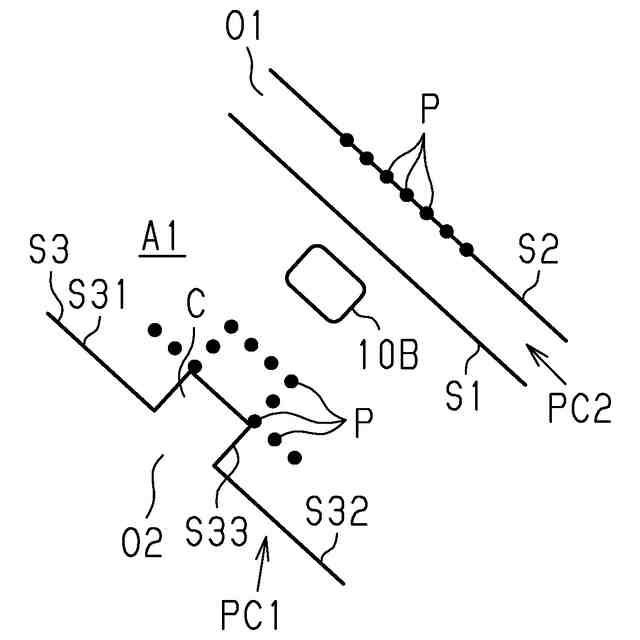
比較例の自己位置推定制御によって推定された仮の自己位置の一例を示す図である。
比較例の自己位置推定制御によって推定された仮の自己位置の一例を示す図である。
【発明を実施するための形態】
【0010】
自己位置推定装置の一実施形態について説明する。
図1に示すように、移動体10が用いられる環境A1には種々の構造物O1,O2が含まれる。構造物O1,O2は、例えば、壁、柱、及び屋根など、建物を構成する部材を含む。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社コロナ
石油ストーブ
3日前
個人
電気抵抗の測定方法
11日前
株式会社トプコン
測量装置
3日前
株式会社トプコン
測量装置
26日前
株式会社トプコン
測量装置
26日前
太陽誘電株式会社
検出装置
14日前
CKD株式会社
錠剤検査装置
18日前
日本碍子株式会社
ガスセンサ
24日前
北陽電機株式会社
光電センサ
10日前
株式会社キーエンス
超音波流量センサ
14日前
株式会社東芝
センサ
14日前
大和製衡株式会社
組合せ計量装置
4日前
大陽日酸株式会社
液面センサ
24日前
愛知製鋼株式会社
位置推定システム
17日前
株式会社チノー
放射光導光型温度計
14日前
ローム株式会社
磁気検出装置
4日前
株式会社ジークエスト
感温センサー
14日前
ニデック株式会社
測定用治具
11日前
ニデック株式会社
測定用治具
11日前
中央精機株式会社
変角平行光投光装置
24日前
株式会社トクヤマ
全固体型イオン選択性電極
24日前
東レ株式会社
センサー素子及びガスセンサー
17日前
株式会社 システムスクエア
検査装置
3日前
株式会社ヒロハマ
包装用容器の気密検査治具
20日前
TDK株式会社
磁気検出システム
20日前
TDK株式会社
センサモジュール
20日前
株式会社イシダ
X線検査装置
14日前
ホシデン株式会社
センサ装置
14日前
株式会社イシダ
計量装置
26日前
コムスキャンテクノ株式会社
X線CT装置
26日前
ローム株式会社
加速度センサ
3日前
三菱電機株式会社
腐食促進試験装置
20日前
個人
計量器具
10日前
エスペック株式会社
温度槽及び環境形成装置
20日前
大阪瓦斯株式会社
検知システム
27日前
横河電機株式会社
ガス分析装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ