TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024127882
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2024065175,2023545932
出願日
2024-04-15,2023-03-08
発明の名称
ロボット装置、制御システム、制御方法、及びプログラム
出願人
三菱電機株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20240912BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】顔認証を精度良く行うことができるロボット装置を提供すること。
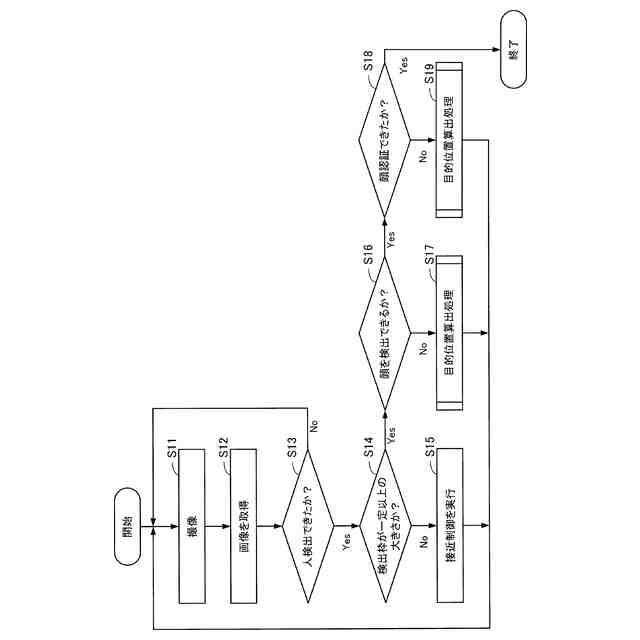
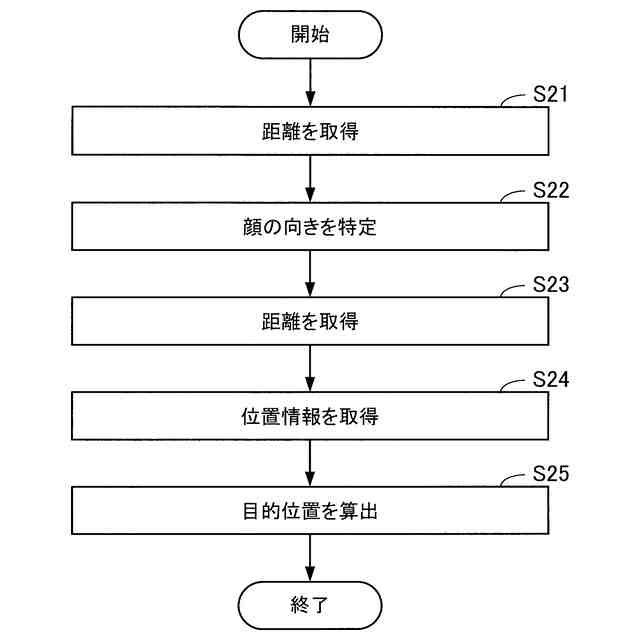
【解決手段】ロボット装置100は、人を含む画像を取得するカメラ104と、ロボット装置100を移動させる駆動部105と、画像から人又は当該人の顔を検出する検出部140と、人の顔認証を実行できるかを判定する判定部150と、人の向き、又は当該人の顔の向きを示す向き情報、ロボット装置100の位置情報、ロボット装置100と人との間の距離である第1の距離、及び人を所望の大きさで撮影するための距離である第2の距離を取得する取得部130と、向き情報、位置情報、第1の距離、及び第2の距離に基づいて、人の顔認証が可能な位置又は経路を算出する算出部160と、顔認証を実行できないと判定した場合、顔認証が可能な位置にロボット装置が移動する、又は経路に沿ってロボット装置が移動するように駆動部105を制御する制御部170とを備える。
【選択図】図3
特許請求の範囲
【請求項1】
ロボット装置であって、
人を含む画像を取得するカメラと、
前記ロボット装置を移動させる駆動部と、
前記カメラが取得した画像から人又は当該人の顔を検出する検出部と、
前記検出部で検出した人の顔認証を実行できるかを判定する判定部と、
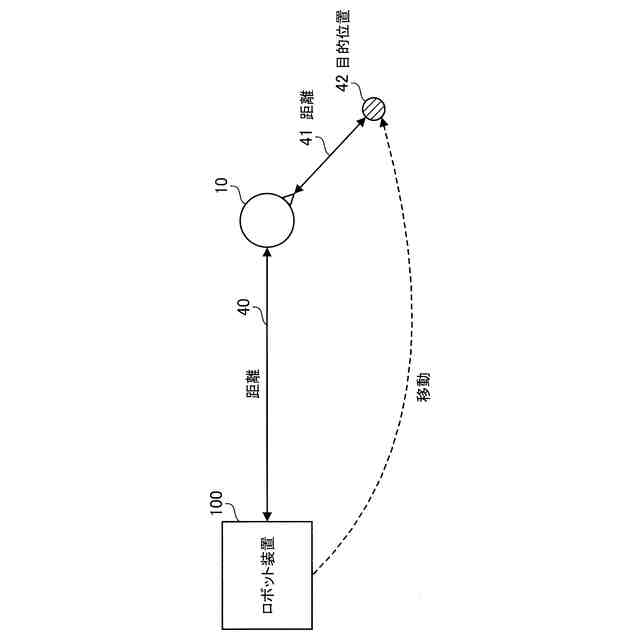
前記カメラが撮影した人の向き、又は当該人の顔の向きを示す向き情報、前記ロボット装置の位置情報、前記ロボット装置と前記カメラが撮影した人との間の距離である第1の距離、及び前記カメラが撮影した人を所望の大きさで撮影するための距離である第2の距離を取得する取得部と、
前記向き情報、前記位置情報、前記第1の距離、及び前記第2の距離に基づいて、前記人の顔認証が可能な位置又は経路を算出する算出部と、
前記判定部が顔認証を実行できないと判定した場合、顔認証が可能な前記位置に前記ロボット装置が移動する、又は前記経路に沿って前記ロボット装置が移動するように前記駆動部を制御する制御部と
を備える、
ロボット装置。
続きを表示(約 1,700 文字)
【請求項2】
前記制御部は、
前記検出部での検出結果により、検出枠が予め定められた枠の基準よりも小さい場合、前記カメラで撮影した人に接近するように前記駆動部を制御する、
請求項1に記載のロボット装置。
【請求項3】
前記制御部は、
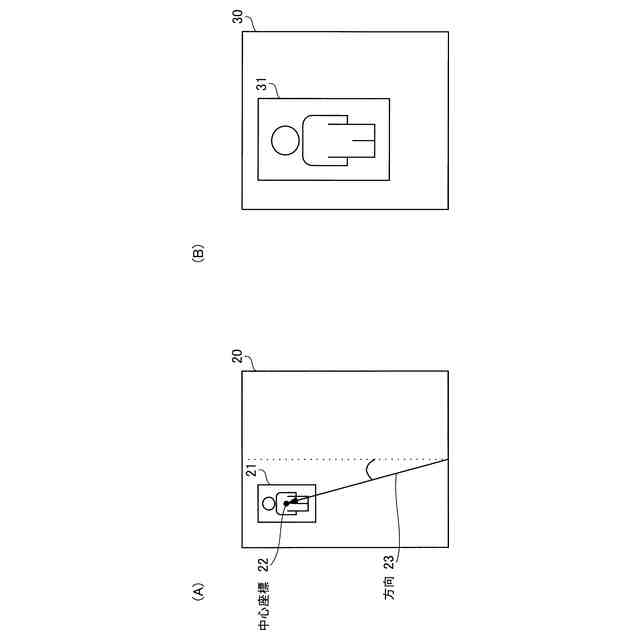
前記カメラで撮影した画像の幅方向の中央位置と、前記カメラで撮影した人の検出枠、又は当該人の顔の検出枠の中心位置とを合わせるように前記駆動部を制御する、
請求項2に記載のロボット装置。
【請求項4】
前記算出部は、
前記カメラで撮影した画像の明度を統計処理した値が予め定められた値以下である場合、前記第2の距離に値を減算し、減算された前記第2の距離を用いて、前記位置を算出する、
請求項1に記載のロボット装置。
【請求項5】
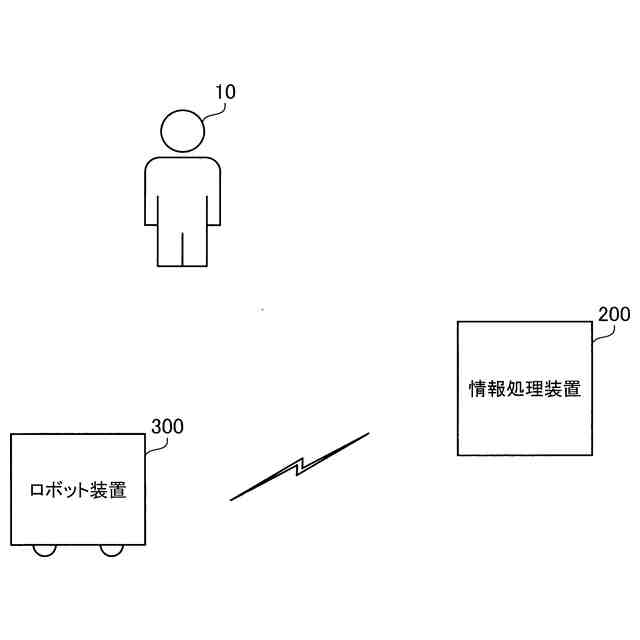
人を含む画像を取得するカメラと駆動部とを有するロボット装置と、情報処理装置と、を含む制御システムであって、
前記カメラが取得した画像から人又は当該人の顔を検出する検出部と、
前記検出部で検出した人の顔認証を実行できるかを判定する判定部と、
前記カメラが撮影した人の向き、又は当該人の顔の向きを示す向き情報、前記ロボット装置の位置情報、前記ロボット装置と前記カメラが撮影した人との間の距離である第1の距離、及び前記カメラが撮影した人を所望の大きさで撮影するための距離である第2の距離を取得する取得部と、
前記向き情報、前記位置情報、前記第1の距離、及び前記第2の距離に基づいて、前記人の顔認証が可能な位置又は経路を算出する算出部と、
前記判定部が顔認証を実行できないと判定した場合、顔認証が可能な前記位置に前記ロボット装置が移動する、又は前記経路に沿って前記ロボット装置が移動するように前記駆動部を制御する制御部と
を備える、
制御システム。
【請求項6】
人を含む画像を取得するカメラと駆動部とを有するロボット装置の制御方法であって、
前記カメラが取得した画像から人又は当該人の顔を検出するステップと、
検出された人の顔認証を実行できるかを判定するステップと、
前記カメラが撮影した人の向き、又は当該人の顔の向きを示す向き情報、前記ロボット装置の位置情報、前記ロボット装置と前記カメラが撮影した人との間の距離である第1の距離、及び前記カメラが撮影した人を所望の大きさで撮影するための距離である第2の距離を取得するステップと、
前記向き情報、前記位置情報、前記第1の距離、及び前記第2の距離に基づいて、前記人の顔認証が可能な位置又は経路を算出するステップと、
顔認証を実行できないと判定した場合、顔認証が可能な前記位置に前記ロボット装置が移動する、又は前記経路に沿って前記ロボット装置が移動するように前記駆動部を制御するステップと、
を備える制御方法。
【請求項7】
人を含む画像を取得するカメラと駆動部とを有するロボット装置の動作を制御するためのプログラムであって、
前記カメラが取得した画像から人又は当該人の顔を検出するステップと、
検出された人の顔認証を実行できるかを判定するステップと、
前記カメラが撮影した人の向き、又は当該人の顔の向きを示す向き情報、前記ロボット装置の位置情報、前記ロボット装置と前記カメラが撮影した人との間の距離である第1の距離、及び前記カメラが撮影した人を所望の大きさで撮影するための距離である第2の距離を取得するステップと、
前記向き情報、前記位置情報、前記第1の距離、及び前記第2の距離に基づいて、前記人の顔認証が可能な位置又は経路を算出するステップと、
顔認証を実行できないと判定した場合、顔認証が可能な前記位置に前記ロボット装置が移動する、又は前記経路に沿って前記ロボット装置が移動するように前記駆動部を制御するステップ、
を含む処理を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット装置、制御システム、制御方法、及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
労働人口の減少により、業務の省人化が求められている。業務の省人化の一例として、監視業務において、例えば、監視システムが提案されている(特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-68974号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、監視業務では、顔認証が行われることがある。顔認証は、あらかじめ登録しておいた人の顔の特徴と、カメラで撮影した画像に含まれる人の顔の特徴とを比較して行われる。しかしながら、画像に含まれている人が背を向けているために顔が映っていない場合や、映ったとしても顔の向きによっては、顔認証の精度が低下してしまう可能性がある。
【0005】
本開示は、顔認証を精度良く行うことができるロボット装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
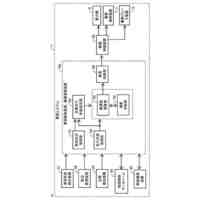
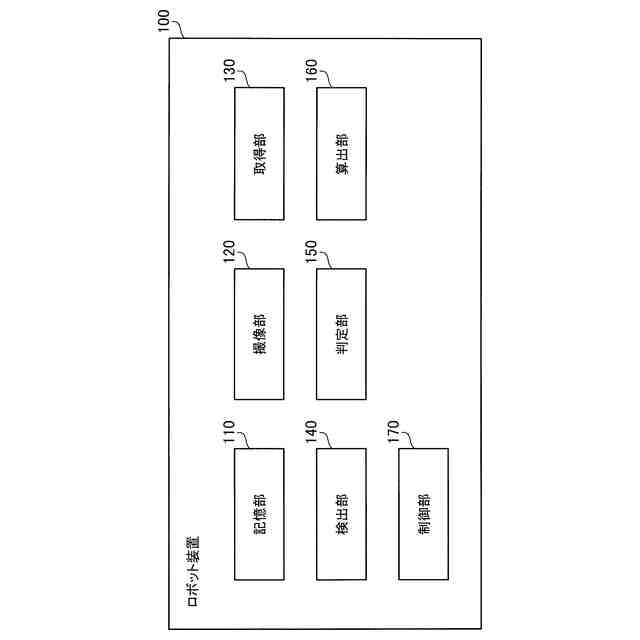
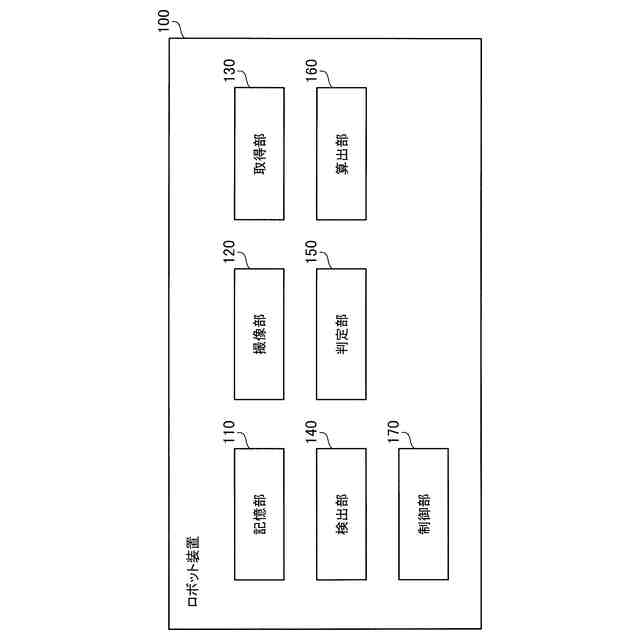
本開示の一態様に係るロボット装置が提供される。ロボット装置は、人を含む画像を取得するカメラと、前記ロボット装置を移動させる駆動部と、前記カメラが取得した画像から人又は当該人の顔を検出する検出部と、前記検出部で検出した人の顔認証を実行できるかを判定する判定部と、前記カメラが撮影した人の向き、又は当該人の顔の向きを示す向き情報、前記ロボット装置の位置情報、前記ロボット装置と前記カメラが撮影した人との間の距離である第1の距離、及び前記カメラが撮影した人を所望の大きさで撮影するための距離である第2の距離を取得する取得部と、前記向き情報、前記位置情報、前記第1の距離、及び前記第2の距離に基づいて、前記人の顔認証が可能な位置又は経路を算出する算出部と、前記判定部が顔認証を実行できないと判定した場合、顔認証が可能な前記位置に前記ロボット装置が移動する、又は前記経路に沿って前記ロボット装置が移動するように前記駆動部を制御する制御部とを備える。
【発明の効果】
【0007】
本開示によれば、顔認証を精度良く行うことができるロボット装置を提供できる。
【図面の簡単な説明】
【0008】
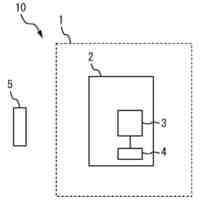
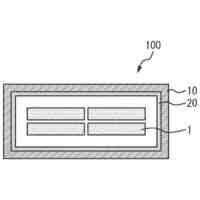
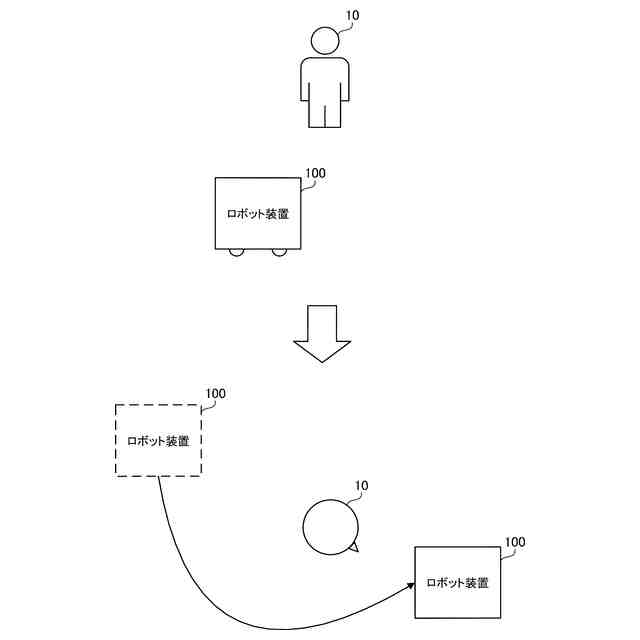
実施の形態1の概要を示す図である。
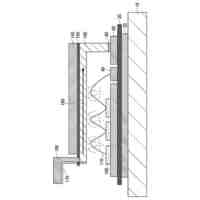
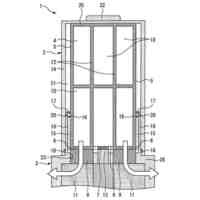
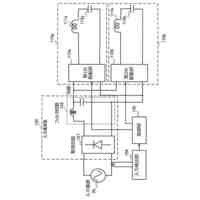
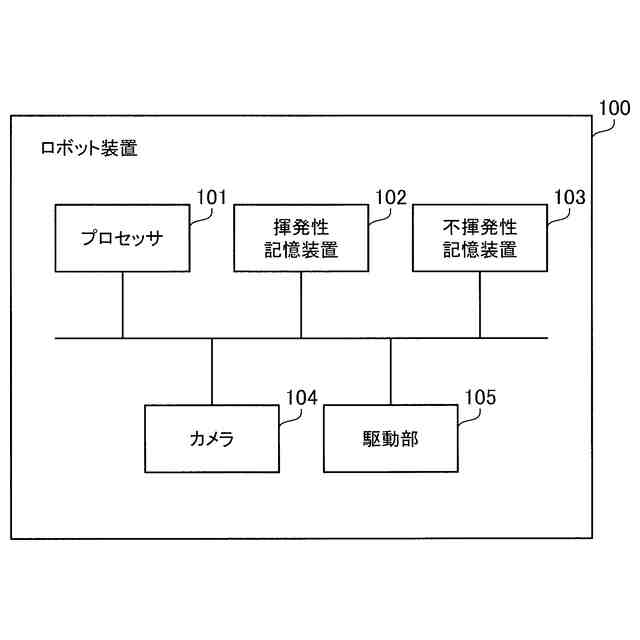
実施の形態1のロボット装置が有するハードウェアを示す図である。
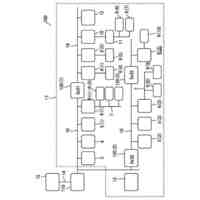
実施の形態1のロボット装置の機能を示すブロック図である。
(A),(B)は、実施の形態1の検出枠の例を示す図である。
実施の形態1の目的位置の算出方法の具体例を示す図である。
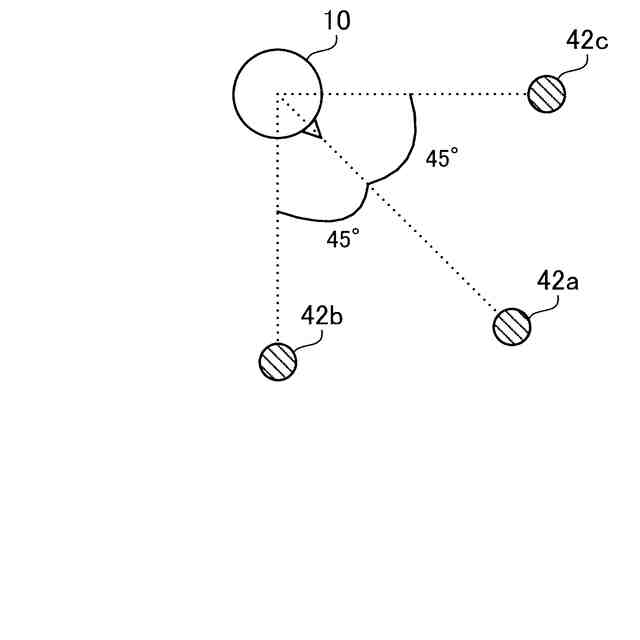
実施の形態1の目的位置を説明するための図である。
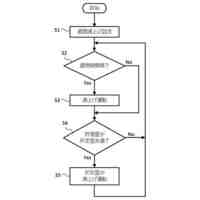
実施の形態1のロボット装置が実行する処理の例を示すフローチャートである。
実施の形態1の目的位置算出処理の例を示すフローチャートである。
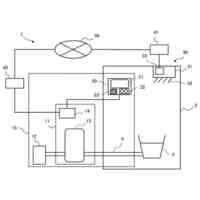
実施の形態2の制御システムを示す図である。
実施の形態2の情報処理装置が有するハードウェアを示す図である。
実施の形態2の情報処理装置の機能を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら実施の形態を説明する。以下の実施の形態は、例にすぎず、本開示の範囲内で種々の変更が可能である。
【0010】
実施の形態1.
図1は、実施の形態1の概要を示す図である。図1は、ロボット装置100を示している。ロボット装置100は、制御方法を実行する装置である。ロボット装置100は、自律型のロボットである。ロボット装置100は、監視業務を行う。ロボット装置100は、カメラを有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
換気扇
21日前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
給湯機
1か月前
三菱電機株式会社
照明器具
3日前
三菱電機株式会社
回転電機
4日前
三菱電機株式会社
給湯装置
1か月前
三菱電機株式会社
送風装置
17日前
三菱電機株式会社
送風装置
17日前
三菱電機株式会社
照明器具
3日前
三菱電機株式会社
送風装置
1か月前
三菱電機株式会社
給湯装置
20日前
三菱電機株式会社
給湯装置
14日前
三菱電機株式会社
給湯装置
21日前
三菱電機株式会社
照明器具
3日前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
加熱調理器
10日前
三菱電機株式会社
電気掃除機
25日前
三菱電機株式会社
電気掃除機
1か月前
三菱電機株式会社
食器洗浄機
4日前
三菱電機株式会社
電気掃除機
11日前
三菱電機株式会社
食器乾燥機
1か月前
三菱電機株式会社
電気掃除機
1か月前
三菱電機株式会社
電池パック
3日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
貯湯式給湯機
4日前
三菱電機株式会社
電池システム
1か月前
三菱電機株式会社
制御システム
17日前
三菱電機株式会社
通信システム
24日前
三菱電機株式会社
換気システム
1か月前
三菱電機株式会社
誘導加熱装置
11日前
三菱電機株式会社
貯湯式給湯機
1か月前
三菱電機株式会社
貯湯式給湯機
1か月前
三菱電機株式会社
最適演算装置
3日前
三菱電機株式会社
貯湯式給湯機
3日前
三菱電機株式会社
給湯システム
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ