TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024126421
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023034786
出願日
2023-03-07
発明の名称
圧入装置、圧入方法、エンコーダの製造方法、学習装置および推論装置
出願人
三菱電機株式会社
代理人
個人
主分類
B23P
19/02 20060101AFI20240912BHJP(工作機械;他に分類されない金属加工)
要約
【課題】圧入部品を被圧入部品に精度良く圧入することができる圧入装置を得ること。
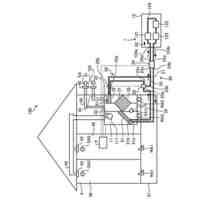
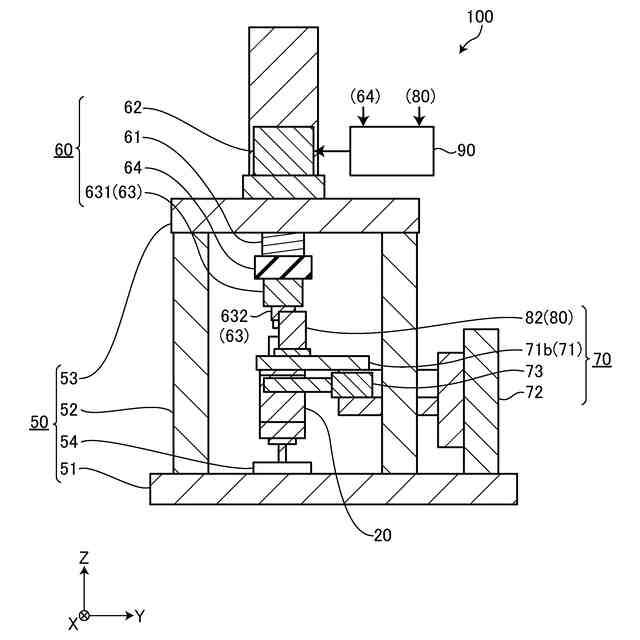
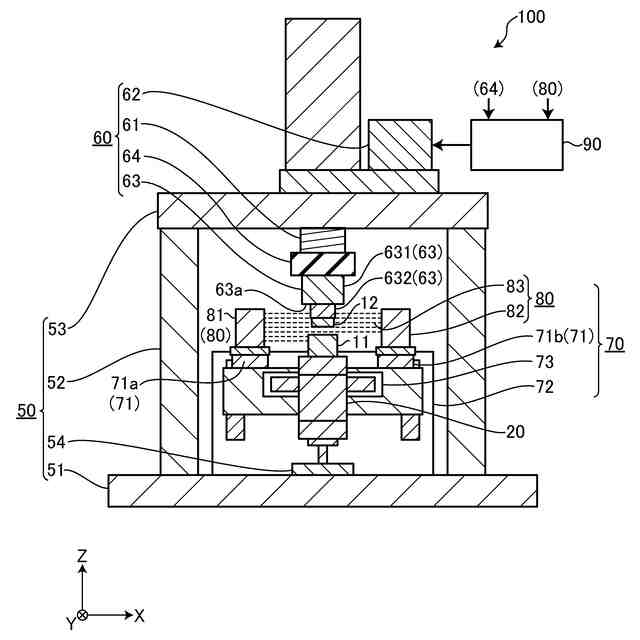
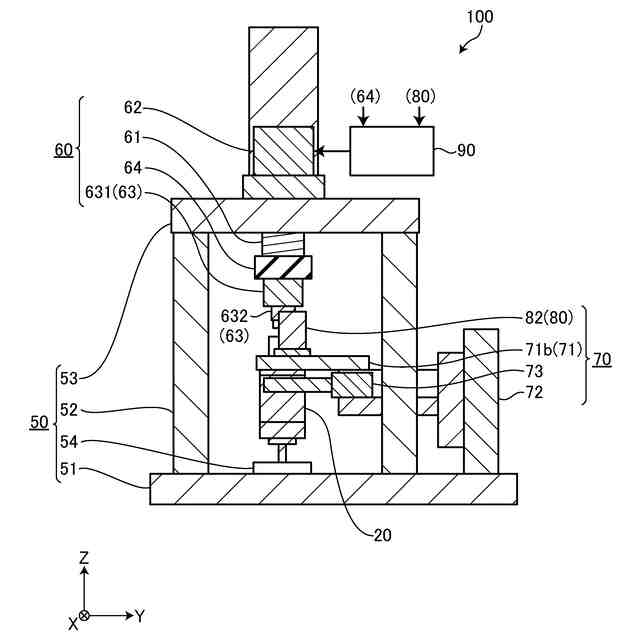
【解決手段】圧入装置100は、被圧入部品と一体とされて圧入部品と被圧入部品との外周側に配置された外周側部品における、圧入方向と反対側を向く反圧入方向側の端面の圧入方向に沿った方向における位置と、圧入に際して圧入ヘッド63において外周側部品の反圧入方向側の端面よりも反圧入方向側に位置する圧入ヘッド基準位置の圧入方向に沿った方向における位置と、の相対距離を測定する位置測定部と、圧入ヘッド63に掛かる荷重を検知するロードセル64と、を有する測定部70を備える。制御部90は、相対距離に基づいて決定した、目標圧入量よりも少ない第1ストローク量で圧入部品を圧入する1回目の圧入を制御し、1回目の圧入について測定部70から取得される情報に基づいて決定した第2ストローク量で圧入部品を圧入する2回目の圧入を制御する。
【選択図】図4
特許請求の範囲
【請求項1】
目標圧入量で圧入部品を被圧入部品に圧入する圧入装置であって、
前記圧入部品を前記被圧入部品に圧入する方向である圧入方向を向く圧入方向側の端面に前記圧入部品を保持する圧入ヘッドと、
前記圧入ヘッドを前記圧入方向に駆動させて前記圧入部品を前記被圧入部品に押圧する駆動部と、
を有する圧入駆動部と、
前記被圧入部品と一体とされて圧入時において前記圧入部品と前記被圧入部品との外周側に配置された外周側部品における、前記圧入方向と反対側を向く反圧入方向側の端面の前記圧入方向に沿った方向における位置と、前記圧入部品の前記被圧入部品への圧入に際して前記圧入ヘッドにおいて前記外周側部品の反圧入方向側の端面よりも反圧入方向側に位置する圧入ヘッド基準位置の前記圧入方向に沿った方向における位置と、の相対距離を測定する位置測定部と、
前記圧入ヘッドに掛かる荷重を検知する荷重検知部と、
を有する測定部と、
前記測定部で取得される情報に基づいて前記圧入駆動部を制御して前記圧入ヘッドの前記圧入方向における移動を制御する制御部と、
を備え、
前記制御部は、
前記相対距離に基づいて決定した、前記目標圧入量よりも少ない第1ストローク量で前記圧入部品を圧入する1回目の圧入を制御し、
前記1回目の圧入について前記測定部から取得される情報に基づいて決定した第2ストローク量で前記圧入部品を圧入する2回目の圧入を制御すること、
を特徴とする圧入装置。
続きを表示(約 2,700 文字)
【請求項2】
位置測定部が、
前記圧入方向に沿った方向に平行なシート状のレーザ光を前記圧入ヘッドと前記外周側部品とに照射する投光器と、
前記レーザ光の光量を検知することで前記外周側部品の反圧入方向側の端面の前記圧入方向に沿った方向における位置と、前記圧入ヘッド基準位置の前記圧入方向に沿った方向における位置とを測定する受光器と、
を備えること、
を特徴とする請求項1に記載の圧入装置。
【請求項3】
前記投光器と前記受光器とを前記圧入方向に垂直な方向に移送する移送部を備え、
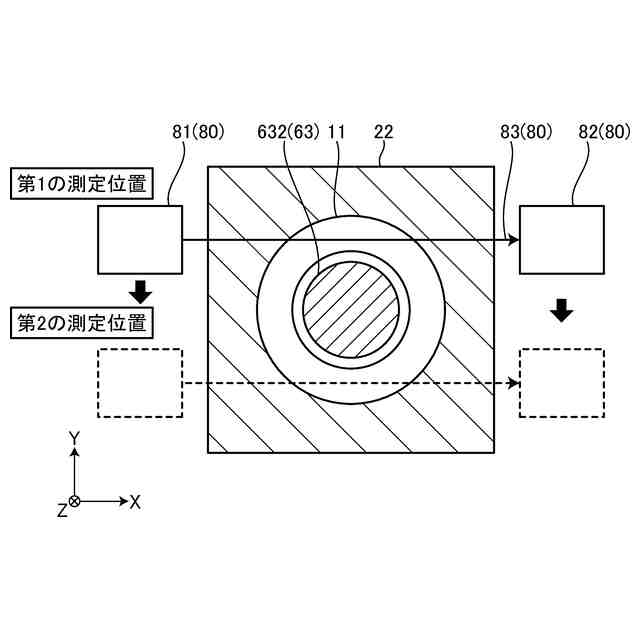
前記位置測定部は、前記圧入方向に垂直な方向において、前記圧入方向に垂直な面内方向における前記被圧入部品の中心位置に対して対称な2か所で測定すること、
を特徴とする請求項2に記載の圧入装置。
【請求項4】
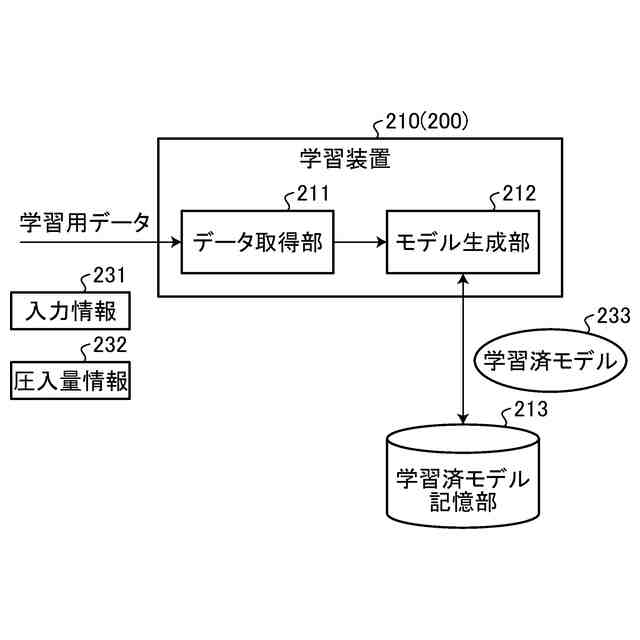
前記1回目の圧入において前記測定部で取得される1回目の圧入における前記圧入部品の圧入状態の情報と、前記第2ストローク量の情報と、前記1回目の圧入において前記測定部で取得される1回目の圧入における前記圧入部品の圧入状態の情報と前記第2ストローク量の情報とに対応する状態の2回目の圧入後の前記圧入部品の圧入量の情報と、を含む学習用データを取得する第1データ取得部と、
前記学習用データを用いて、前記1回目の圧入において前記測定部で取得される1回目の圧入における前記圧入部品の圧入状態の情報から前記2回目の圧入後の前記圧入部品の圧入量である圧入量推論値を推論するための学習済モデルを生成するモデル生成部と、
を有する学習装置を備えること、
を特徴とする請求項1に記載の圧入装置。
【請求項5】
前記1回目の圧入において前記測定部で取得される1回目の圧入における前記圧入部品の圧入状態の情報が、圧入量の時系列データと、圧入荷重の時系列データとを含むこと、
を特徴とする請求項4に記載の圧入装置。
【請求項6】
前記1回目の圧入において前記測定部で取得される1回目の圧入における前記圧入部品の圧入状態の情報を取得する第2データ取得部と、
前記1回目の圧入において前記測定部で取得される1回目の圧入における前記圧入部品の圧入状態の情報から前記2回目の圧入後の前記圧入部品の圧入量である圧入量推論値を推論するための学習済モデルを用いて、前記第2データ取得部が取得した前記1回目の圧入における前記圧入部品の圧入状態の情報から前記圧入量推論値を推論する推論部と、
を有する推論装置を備えること、
を特徴とする請求項1に記載の圧入装置。
【請求項7】
前記第2ストローク量は、前記1回目の圧入後の前記圧入部品の圧入量に対して、前記目標圧入量で前記圧入部品の圧入を行うために前記圧入部品の圧入量を補正する2回目の圧入を行うためのストローク量の補正値であること、
を特徴とする請求項1に記載の圧入装置。
【請求項8】
圧入装置において目標圧入量で圧入部品を被圧入部品に圧入する圧入方法であって、
圧入ヘッドにおける、前記圧入部品を前記被圧入部品に圧入する方向である圧入方向を向く圧入方向側の端面に前記圧入部品を保持する保持工程と、
圧入前に、前記被圧入部品と一体とされて圧入時において前記圧入部品と前記被圧入部品との外周側に配置された外周側部品における、前記圧入方向と反対側を向く反圧入方向側の端面の前記圧入方向に沿った方向における位置と、前記圧入部品の前記被圧入部品への圧入に際して前記圧入ヘッドにおいて前記外周側部品の反圧入方向側の端面よりも反圧入方向側に位置する圧入ヘッド基準位置の前記圧入方向に沿った方向における位置と、の相対距離を測定する圧入前測定工程と、
前記圧入前測定工程において取得された前記相対距離に基づいて決定される1回目の圧入において目標とする圧入量であって前記目標圧入量よりも少ない第1ストローク量で前記圧入部品を圧入する1回目の圧入工程と、
前記1回目の圧入後に、前記相対距離と、前記被圧入部品に掛かる荷重と、を測定する1回目の圧入後測定工程と、
前記1回目の圧入後測定工程において取得された前記相対距離に基づいて決定される圧入量に、前記圧入前測定工程において取得された情報と、前記1回目の圧入後測定工程において取得された情報とに基づいて決定される、前記被圧入部品に掛かる荷重による前記被圧入部品の変形量を加算した第2ストローク量を計算する計算工程と、
前記第2ストローク量で前記圧入部品を圧入する2回目の圧入工程と、
を含むことを特徴とする圧入方法。
【請求項9】
前記2回目の圧入工程後に、前記外周側部品の反圧入方向側の端面の前記圧入方向に沿った方向における位置と、前記圧入ヘッドの前記圧入ヘッド基準位置の前記圧入方向に沿った方向における位置と、前記相対距離と、前記被圧入部品に掛かる荷重と、を測定する2回目の圧入後測定工程と、
前記1回目の圧入工程において取得される1回目の圧入における前記圧入部品の圧入状態の情報と、前記第2ストローク量の情報と、前記1回目の圧入において取得される1回目の圧入における前記圧入部品の圧入状態の情報と前記第2ストローク量の情報とに対応する状態の2回目の圧入後の前記圧入部品の圧入量の情報と、を含む学習用データを取得し、前記学習用データを用いて、前記1回目の圧入工程において取得された1回目の圧入における前記圧入部品の圧入状態の情報から前記2回目の圧入工程後の前記圧入部品の圧入量である圧入量推論値を推論するための学習済モデルを生成する学習工程と、
を含み、
前記計算工程では、前記学習済モデルに前記1回目の圧入工程において取得された1回目の圧入における前記圧入部品の圧入状態の情報を入力して得られた前記圧入量推論値を取得すること、
を特徴とする請求項8に記載の圧入方法。
【請求項10】
前記1回目の圧入工程中に、前記外周側部品の反圧入方向側の端面の前記圧入方向に沿った方向における位置の時系列データと、前記圧入ヘッドの前記圧入ヘッド基準位置の前記圧入方向に沿った方向における位置の時系列データと、前記相対距離の時系列データと、前記被圧入部品に掛かる荷重の時系列データと、を取得すること、
を特徴とする請求項9に記載の圧入方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、圧入部品を被圧入部品に圧入する圧入装置、圧入方法、エンコーダの製造方法、学習装置および推論装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、圧入量と圧入荷重とを測定し、複数のステップに分けて圧入を行っており、圧入荷重に対する被圧入部品の変形量を導出するための圧入の後、導出した変形量を加味した圧入を行う圧入装置が記載されている。特許文献1の圧入装置では、圧入装置の基準面に対する圧入部品の端面の位置を測定している。
【先行技術文献】
【特許文献】
【0003】
特開2004-25378号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1の圧入装置では、被圧入部品の弾性変形量と圧入量の合計を位置センサで測定し、そこから弾性変形量を導出している。このように、特許文献1の圧入装置では、弾性変形量は直接測定できず、予測値となる。すなわち、特許文献1の圧入装置では、予測値に基づいて圧入を行うため、圧入精度が低下するという問題点があった。
【0005】
本開示は、上記に鑑みてなされたものであって、圧入部品を被圧入部品に精度良く圧入することができる圧入装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本開示にかかる圧入装置は、目標圧入量で圧入部品を被圧入部品に圧入する圧入装置である。圧入装置は、圧入部品を被圧入部品に圧入する方向である圧入方向を向く圧入方向側の端面に圧入部品を保持する圧入ヘッドと、圧入ヘッドを圧入方向に駆動させて圧入部品を被圧入部品に押圧する駆動部と、を有する圧入駆動部を備える。圧入装置は、被圧入部品と一体とされて圧入時において圧入部品と被圧入部品との外周側に配置された外周側部品における、圧入方向と反対側を向く反圧入方向側の端面の圧入方向に沿った方向における位置と、圧入部品の被圧入部品への圧入に際して圧入ヘッドにおいて外周側部品の反圧入方向側の端面よりも反圧入方向側に位置する圧入ヘッド基準位置の圧入方向に沿った方向における位置と、の相対距離を測定する位置測定部と、圧入ヘッドに掛かる荷重を検知する荷重検知部と、を有する測定部を備える。圧入装置は、測定部で取得される情報に基づいて圧入駆動部を制御して圧入ヘッドの圧入方向における移動を制御する制御部を備える。制御部は、相対距離に基づいて決定した、目標圧入量よりも少ない第1ストローク量で圧入部品を圧入する1回目の圧入を制御し、1回目の圧入について測定部から取得される情報に基づいて決定した第2ストローク量で圧入部品を圧入する2回目の圧入を制御する。
【発明の効果】
【0007】
本開示にかかる圧入装置によれば、圧入部品を被圧入部品に精度良く圧入することができる、という効果を奏する。
【図面の簡単な説明】
【0008】
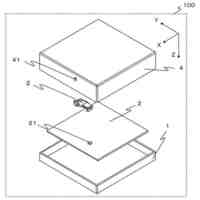
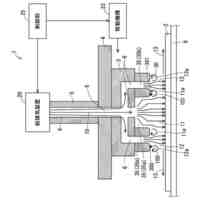
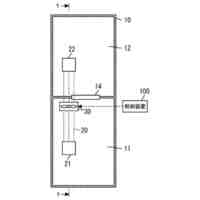
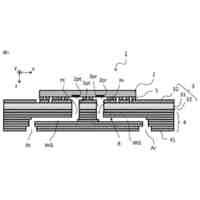
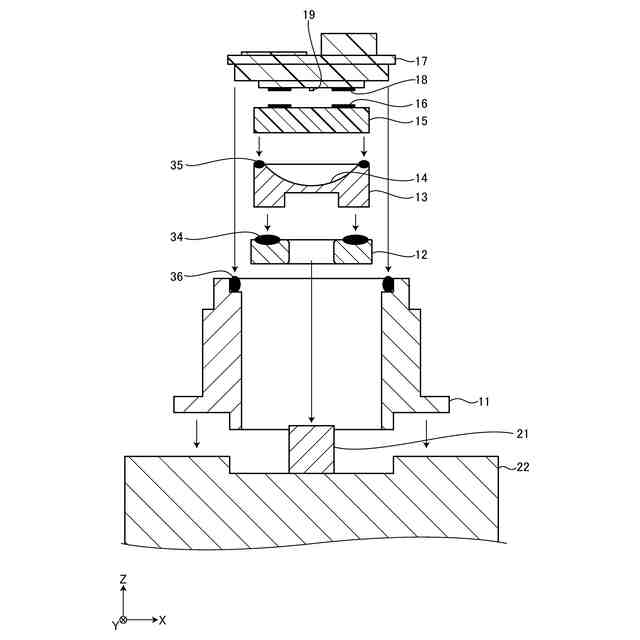
実施の形態1にかかる光学式エンコーダの概略構造を示す縦断面図
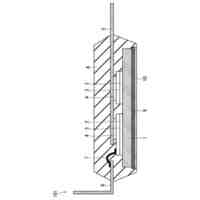
実施の形態1にかかる光学式エンコーダの組立構造の概略を示す縦断面図
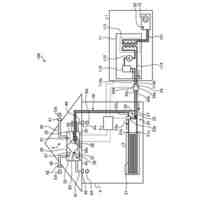
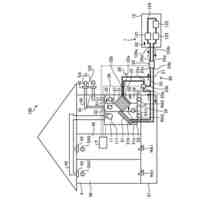
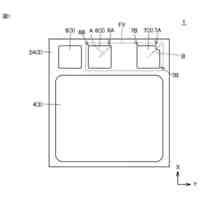
実施の形態1にかかる圧入装置の正面図
実施の形態1にかかる圧入装置の側面図
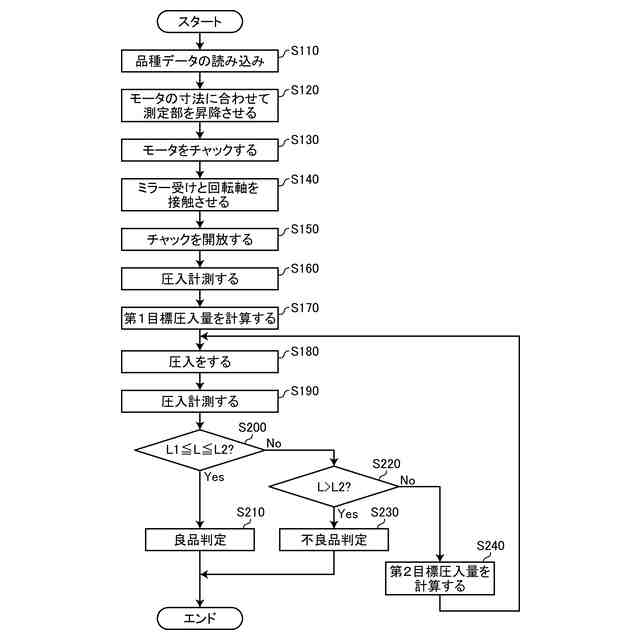
実施の形態1にかかる圧入装置の圧入動作の手順を示すフローチャート
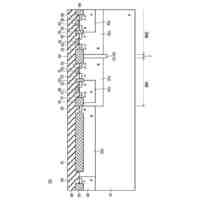
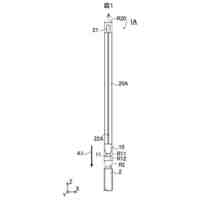
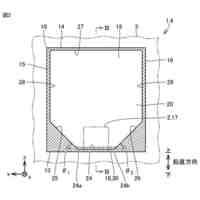
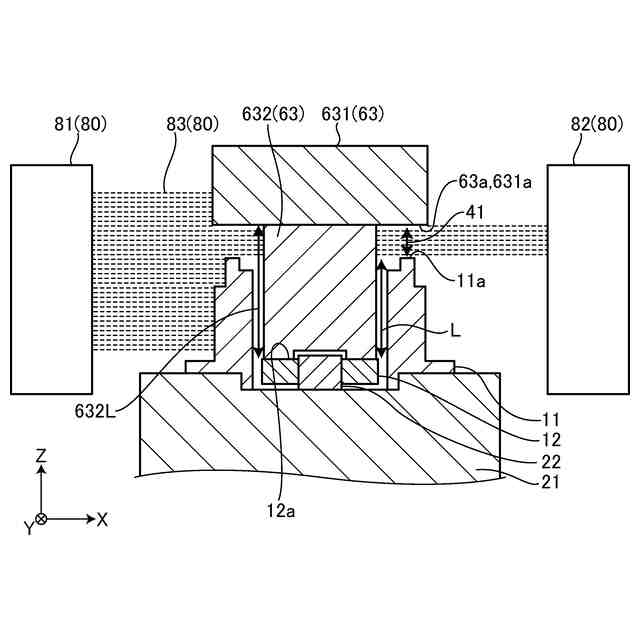
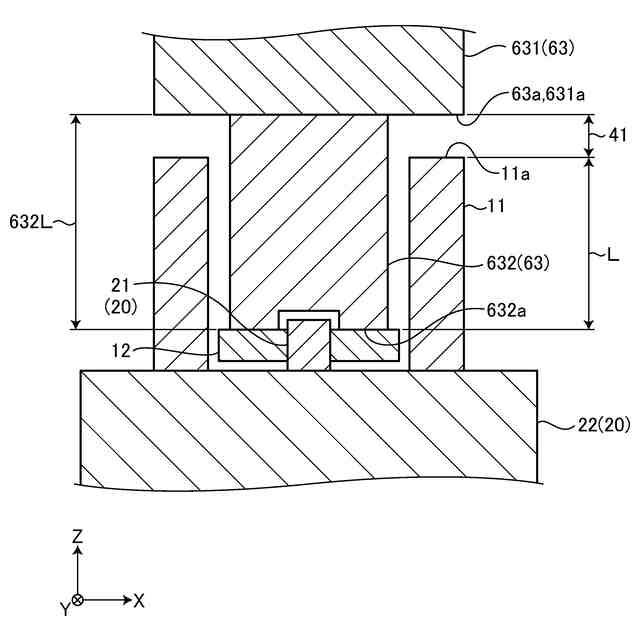
実施の形態1にかかる圧入装置における測定箇所を拡大した縦断面図
実施の形態1にかかる圧入装置における測定箇所を拡大した横断面図
実施の形態1にかかる圧入装置において管理される寸法を説明する概念図
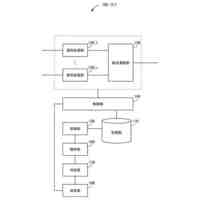
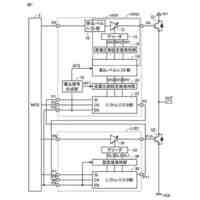
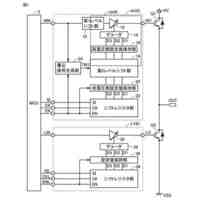
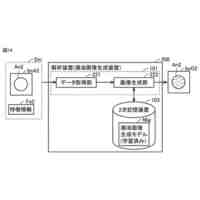
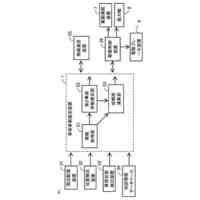
実施の形態2にかかる学習装置の構成を示す図
実施の形態2にかかる学習装置による学習処理の処理手順を示すフローチャート
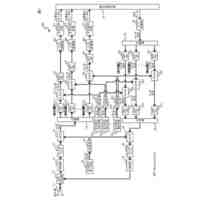
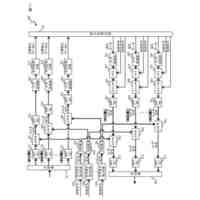
実施の形態2にかかる学習装置が用いるニューラルネットワークの構成を示す図
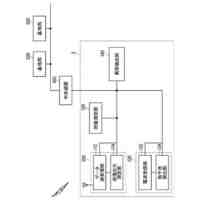
実施の形態2にかかる推論装置の構成を示す図
実施の形態2にかかる推論装置による推論処理の処理手順を示すフローチャート
実施の形態1,2にかかる制御部の機能をハードウェアで実現した構成を示す図
実施の形態1,2にかかる制御部の機能をソフトウェアで実現した構成を示す図
【発明を実施するための形態】
【0009】
以下に、実施の形態にかかる圧入装置、圧入方法、エンコーダの製造方法、学習装置および推論装置を図面に基づいて詳細に説明する。
【0010】
実施の形態1.
図1は、実施の形態1にかかる光学式エンコーダの概略構造を示す縦断面図である。図1は、光学式エンコーダ10がモータ20に固定された状態を示している。実施の形態1においては、図1における左右方向を、X軸方向とする。図1における紙面奥行方向を、Y軸方向とする。図1における上下方向を、Z軸方向とする。X軸方向は、Y軸方向とZ軸方向とに直交する方向である。Y軸方向は、X軸方向とZ軸方向とに直交する方向である。Z軸方向は、X軸方向とY軸方向とに直交する方向である。Z軸方向は、モータ20の回転軸21の軸方向に沿った方向である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
22日前
三菱電機株式会社
放電装置
2日前
三菱電機株式会社
発光装置
2日前
三菱電機株式会社
半導体装置
10日前
三菱電機株式会社
光通信装置
2日前
三菱電機株式会社
半導体装置
3日前
三菱電機株式会社
半導体装置
3日前
三菱電機株式会社
半導体装置
19日前
三菱電機株式会社
半導体装置
9日前
三菱電機株式会社
半導体製造装置
12日前
三菱電機株式会社
換気空調システム
18日前
三菱電機株式会社
換気空調システム
18日前
三菱電機株式会社
換気空調システム
18日前
三菱電機株式会社
半導体モジュール
9日前
三菱電機株式会社
半導体モジュール
22日前
三菱電機株式会社
保護リレーシステム
9日前
三菱電機株式会社
移載装置及び吸着方法
19日前
三菱電機株式会社
半導体チップ及び半導体装置
19日前
三菱電機株式会社
拡管工具および管の拡管方法
9日前
三菱電機株式会社
トルク締め個所検出システム
22日前
三菱電機株式会社
送風システム及び空調システム
3日前
三菱電機株式会社
送風システム及び空調システム
3日前
三菱電機株式会社
バーチャルオフィス支援システム
10日前
三菱電機株式会社
ベーパーチャンバー及び冷却装置
17日前
三菱電機株式会社
レーダ装置および物体位置検出方法
2日前
三菱電機株式会社
漏油画像生成装置および漏油検知装置
19日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
12日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
12日前
三菱電機株式会社
移動体制御装置および移動体制御方法
2日前
三菱電機株式会社
導波管アンテナおよびレーダシステム
2日前
三菱電機株式会社
車両挙動推定装置及び車両挙動推定方法
16日前
三菱電機株式会社
アンテナモジュールおよびアンテナ装置
19日前
三菱電機株式会社
半導体装置および半導体装置の製造方法
17日前
三菱電機株式会社
異常検出システム、および、異常検出方法
4日前
三菱電機株式会社
半導体装置、及び、半導体装置の製造方法
17日前
三菱電機株式会社
半導体製造装置および半導体装置の製造方法
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ