TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024124186
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2023032184
出願日
2023-03-02
発明の名称
電子部品の搬送装置
出願人
株式会社村田製作所
代理人
個人
,
個人
主分類
B65G
47/18 20060101AFI20240905BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】搬送されるワークの供給量を正確に検出し、生産性を向上させることができる、電子部品の搬送装置を提供すること。
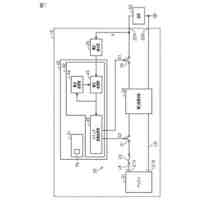
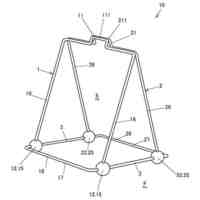
【解決手段】電子部品の搬送装置1は、容器10と、搬送機構20と、センサー30と、容器傾け機構50と、ノック機構40と、制御部100と、を有し、容器10は、収容部11と、排出口12と、を有し、搬送機構20は、複数の電子部品22を搬送する搬送部21を有し、センサー30は、複数の電子部品22の総断面積32を検出する断面積センサーであり、容器傾け機構50は、容器10を傾ける機構であり、ノック機構40は、容器10を叩く機構であり、制御部100は、排出口12から排出された複数の電子部品22を搬送部21で搬送する際に、センサー30で検出された複数の電子部品22の総断面積32の検出結果に基づいて、容器傾け機構50を制御して、容器10の傾倒角度を調整する。
【選択図】図1
特許請求の範囲
【請求項1】
容器と、搬送機構と、センサーと、容器傾け機構と、ノック機構と、制御部と、を有する電子部品の搬送装置であって、
前記容器は、
内部に複数の電子部品を収容する収容部と、
前記複数の電子部品を排出する排出口と、を有し、
前記搬送機構は、
前記排出口から排出された前記複数の電子部品を搬送する搬送部を有し、
前記センサーは、
前記搬送部において搬送される前記複数の電子部品の総断面積を検出する断面積センサーであり、
前記容器傾け機構は、
前記容器を傾ける機構であり、
前記ノック機構は、
前記排出口より前記複数の電子部品を排出するために前記容器を叩く機構であり、
前記制御部は、
前記排出口から排出された前記複数の電子部品を前記搬送部で搬送する際に、前記センサーで検出された前記複数の電子部品の総断面積の検出結果に基づいて、前記容器傾け機構を制御して、前記容器の傾倒角度を調整する、電子部品の搬送装置。
続きを表示(約 880 文字)
【請求項2】
前記容器の傾倒角度は、
前記排出口を備える面と、重力方向に対し直交する水平面との間の角度が90°以上135°以下である、請求項1に記載の電子部品の搬送装置。
【請求項3】
前記容器の傾倒角度は、
前記排出口を備える面と、重力方向に対し直交する水平面との間の角度が90°以上125°以下である、請求項1に記載の電子部品の搬送装置。
【請求項4】
前記ノック機構が前記容器を叩く頻度は、1回/秒以上10回/秒以下である、請求項1又は請求項2に記載の電子部品の搬送装置。
【請求項5】
前記ノック機構が前記容器を叩く頻度は、2回/秒以上3回/秒以下である、請求項1又は請求項2に記載の電子部品の搬送装置。
【請求項6】
前記ノック機構が前記容器を叩く頻度は、前記センサーで検出された前記複数の電子部品の総断面積の値に基づいて制御される、請求項1又は請求項2に記載の電子部品の搬送装置。
【請求項7】
前記容器は、蓋をさらに有し、
前記蓋は、前記蓋の下部に前記排出口を配置しており、
前記搬送機構は、
前記排出口よりも低い位置に配置されている、請求項1又は請求項2に記載の電子部品の搬送装置。
【請求項8】
前記制御部は、
前記排出口から排出された前記複数の電子部品を前記搬送部で搬送する際に、前記センサーで検出された前記複数の電子部品の総断面積の検出結果に基づいて、前記容器傾け機構をフィードバック制御して、前記容器の傾倒角度を調整する、請求項1又は請求項2に記載の電子部品の搬送装置。
【請求項9】
前記制御部は、
前記排出口から排出された前記複数の電子部品を前記搬送部で搬送する際に、前記センサーで検出された前記複数の電子部品の総断面積の検出結果に基づいて、前記容器傾け機構をPID制御して、前記容器の傾倒角度を調整する、請求項1又は請求項2に記載の電子部品の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電子部品の搬送装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、電子部品の搬送装置が知られている。
特許文献1には、2つのセンサーで、ゲート付近にたまったワークの量を2点で検出して電子部品を搬送する、電子部品の搬送装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平10-218334号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されるような電子部品の搬送装置においては、2つのセンサーで、ゲート付近にたまったワークの量を2点でしか検出していないため、任意の供給量にするためには、都度センサー位置を手動で変更する必要があり、生産性に課題があった。
【0005】
また、被処理物の供給量の検出に透過型光電センサーを用いているため、搬送されたワークの一部分しか検出できず、搬送されるワークの全ての供給量を正確に検出できない場合がある。
【0006】
本発明の目的は、搬送されるワークの供給量を正確に検出し、生産性を向上することができる、電子部品の搬送装置を提供することである。
【課題を解決するための手段】
【0007】
容器と、搬送機構と、センサーと、容器傾け機構と、ノック機構と、制御部と、を有する電子部品の搬送装置であって、前記容器は、内部に複数の電子部品を収容する収容部と、前記複数の電子部品を排出する排出口と、を有し、前記搬送機構は、前記排出口から排出された前記複数の電子部品を搬送する搬送部を有し、前記センサーは、前記搬送部において搬送される前記複数の電子部品の総断面積を検出する断面積センサーであり、前記容器傾け機構は、前記容器を傾ける機構であり、前記ノック機構は、前記排出口より前記複数の電子部品を排出するために前記容器を叩く機構であり、前記制御部は、前記排出口から排出された前記複数の電子部品を前記搬送部で搬送する際に、前記センサーで検出された前記複数の電子部品の総断面積の検出結果に基づいて、前記容器傾け機構を制御して、前記容器の傾倒角度を調整する、電子部品の搬送装置。
【発明の効果】
【0008】
本発明によれば、搬送されるワークの供給量を正確に検出し、生産性を向上することができる、電子部品の搬送装置を提供することができる。
【図面の簡単な説明】
【0009】
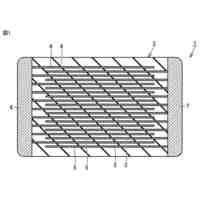
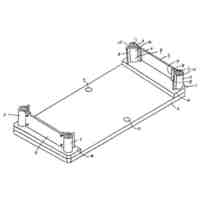
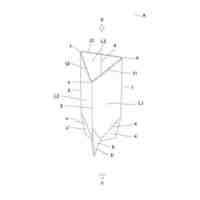
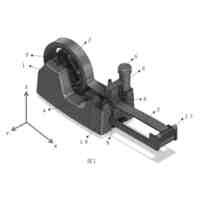
電子部品の搬送装置の概略斜視図である。
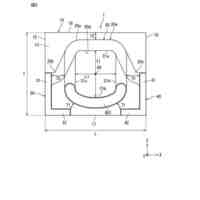
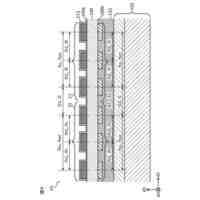
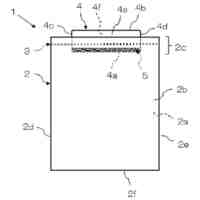
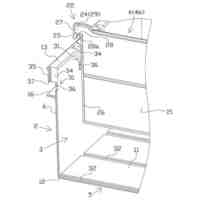
電子部品の搬送装置の側面図である。
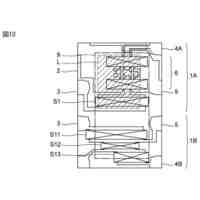
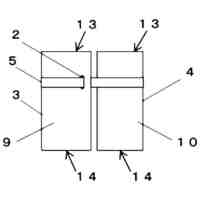
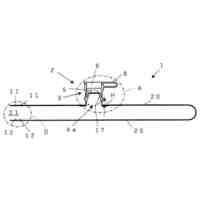
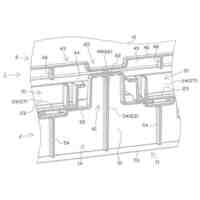
電子部品の搬送装置のA方向から見た矢視図である。
制御部の機能ブロックを示すブロック図である。
容器角度と電子部品の総断面積との関係を示すグラフである。
容器角度と電子部品重量との関係を示すグラフである。
電子部品の搬送装置の電子部品の搬送量の制御方法のフローチャートである。
電子部品の搬送量の制御方法のうち容器傾け工程の詳細の一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態に係る電子部品の搬送装置について説明する。図1は、電子部品の搬送装置の概略斜視図である。図2は、電子部品の搬送装置の側面図である。図3は、電子部品の搬送装置のA方向から見た矢視図である。なお、図1及び図2にはXYZ直交座標系が示されている。図1に示すように、X方向は、電子部品を搬送する方向に平行な方向である。Y方向は、電子部品の搬送装置の幅方向を指す。Z方向は、電子部品の搬送装置の高さ方向を指す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社村田製作所
外観選別装置
2日前
株式会社村田製作所
機能材料インク
1日前
株式会社村田製作所
インダクタ部品
1日前
株式会社村田製作所
複合フィルタ装置
1日前
株式会社村田製作所
熱拡散デバイス及び電子機器
1日前
株式会社村田製作所
高周波モジュール及び通信装置
1日前
株式会社村田製作所
高周波モジュール及び通信装置
1日前
株式会社村田製作所
電池パックおよびそのの制御方法
1日前
株式会社村田製作所
電源装置、電源回路の制御装置、及びプログラム
1日前
株式会社村田製作所
弾性波素子、弾性波フィルタ装置およびマルチプレクサ
1日前
株式会社村田製作所
アタッチメント、フォークリフト及びRFIDタグの読み取り方法
2日前
個人
箱
29日前
個人
包装体
1か月前
個人
ゴミ箱
22日前
個人
構造体
8か月前
個人
収納用具
4か月前
個人
物品収納具
4か月前
個人
半蓋半箱筒
10か月前
個人
折り畳み水槽
1か月前
個人
パウチ補助具
17日前
個人
ダンボール宝箱
1か月前
個人
掃除楽々ゴミ箱
5か月前
個人
開封用カッター
6か月前
個人
折りたたみコップ
7か月前
個人
チャック付き袋体
7か月前
個人
圧縮収納袋
1か月前
個人
パウチ容器
8か月前
株式会社イシダ
箱詰装置
3か月前
個人
粘着テープ切断装置
3か月前
個人
粘着テープ剥がし具
6か月前
積水樹脂株式会社
接着剤
15日前
個人
粘着テープ剥がし具
2か月前
三甲株式会社
容器
4か月前
三甲株式会社
容器
3か月前
株式会社イシダ
包装装置
29日前
株式会社イシダ
包装装置
10か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ