TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024118326
公報種別
公開特許公報(A)
公開日
2024-08-30
出願番号
2023024687
出願日
2023-02-20
発明の名称
ロボットシステム、および、ロボットの制御方法
出願人
日立チャネルソリューションズ株式会社
代理人
弁理士法人磯野国際特許商標事務所
主分類
G01C
15/02 20060101AFI20240823BHJP(測定;試験)
要約
【課題】より正確にロボットの移動先の墨出しの位置を計測する。
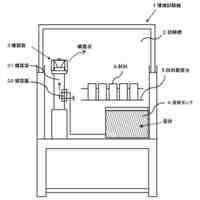
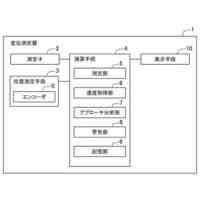
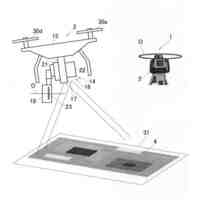
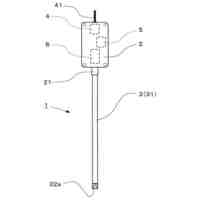
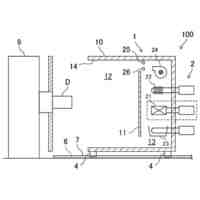
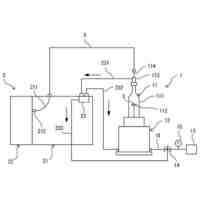
【解決手段】墨出しロボットシステム1は、作業現場の基準芯または/および既知点、ならびに、墨出しロボット2の位置を計測する追尾型三次元計測器4と、基準芯または/および既知点を用いて、CAD図面の座標における追尾型三次元計測器4の位置を確定する位置確定部と、基準芯または/および既知点のうち2つの組み合わせを用いて、CAD図面の座標系を追尾型三次元計測器4の座標系に変換する変換部と、CAD図面の座標系にて、墨出しロボット2の移動先として指定された目標位置に応じて、基準芯および既知点のうち2つ以上を特定し、変換部を用いて、CAD図面の座標系における目標位置を、追尾型三次元計測器4の座標系に変換する座標計算部とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
作業現場の基準芯または/および既知点、ならびに、ロボットの位置を計測する測量機と、
前記基準芯または/および前記既知点を用いて、作業現場図面の座標における前記測量機の位置を確定する位置確定部と、
前記基準芯または/および前記既知点のうち2つ以上の組み合わせを用いて、前記作業現場図面の座標系を前記測量機の座標系に変換する変換部と、
前記作業現場図面の座標系にて、前記ロボットの移動先として指定された目標位置に応じて、前記基準芯および前記既知点のうち2つ以上を特定し、前記変換部を用いて、前記作業現場図面の座標系における前記目標位置を、前記測量機の座標系に変換する座標計算部と、
前記ロボットを移動させる走行駆動部と、
前記走行駆動部を制御して、前記目標位置に、前記ロボットを移動させる制御部と、
を有することを特徴とするロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記座標計算部は、前記基準芯および前記既知点のうち前記目標位置から最も距離が近い2つ以上を特定し、前記変換部を用いて、前記作業現場図面の座標系における前記目標位置を、前記測量機の座標系に変換する、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項3】
前記座標計算部は、前記基準芯のうち前記目標位置から最も距離が近い縦横2本を特定し、前記変換部を用いて、前記作業現場図面の座標系における前記目標位置を、前記測量機の座標系に変換する、
ことを特徴とする請求項2に記載のロボットシステム。
【請求項4】
前記作業現場における目標位置と、各基準芯または/および各既知点との距離を計算する距離計算部、
を有することを特徴とする請求項1に記載のロボットシステム。
【請求項5】
前記距離計算部は、前記作業現場における目標位置から基準芯への垂線により、基準芯までの距離を計算する、
ことを特徴とする請求項4に記載のロボットシステム。
【請求項6】
前記座標計算部は、墨出しデータに含まれている任意の墨点に対して前記ロボットが墨出しする際に、前記作業現場図面の座標における墨点の位置を前記目標位置として、前記測量機の座標における墨点の位置を計算して、墨出し位置を調整する、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項7】
前記墨出しデータに含まれる墨点に対して前記ロボットの走行順路を設定する順路設定部、
を有することを特徴とする請求項5に記載のロボットシステム。
【請求項8】
測量機により、作業現場の基準芯または/および既知点、ならびに、ロボットの位置を計測するステップと、
位置確定部により、前記基準芯または/および前記既知点を用いて、作業現場図面の座標における前記測量機の位置を確定するステップと、
変換部により、前前記基準芯または/および前記既知点のうち2つ以上の組み合わせを用いて、前記作業現場図面の座標系を前記測量機の座標系に変換するステップと、
座標計算部により、前記作業現場図面の座標系にて、前記ロボットの移動先として指定された目標位置に応じて、前記基準芯および前記既知点のうち2つ以上を特定し、前記変換部を用いて、前記作業現場図面の座標系における前記目標位置を、前記測量機の座標系に変換するステップと、
制御部が、前記ロボットを移動させる走行駆動部を制御して、前記目標位置に、前記ロボットを移動させるステップと、
を有することを特徴とするロボットの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステム、および、ロボットの制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
設備工事では、墨出し作業が行われる。「墨出し」とは、設置する機器のアンカ位置や、天吊り機器のアンカ位置、付帯機器の架台位置等の、工事の基準となる基準芯や墨出し点を建築物の床面や壁面等に印すことをいう。設備工事では、作業者が基準芯や墨出し点に沿って様々な機器を設置するため、基準芯や墨出し点を正確に印すことは重要である。
【0003】
従来の墨出し作業は、作業者が墨つぼから墨を含んだ糸を引き出し、墨出しを行うべき位置(墨出し位置)の近傍に糸を張り、糸を弾いて床面や壁面等に基準芯を付けることで行われていた。その際に、作業者は、基準となる複数個所同士を結ぶように糸を張ることで、墨出し位置を決定していた。このような従来の墨出し作業では、作業者は正確な墨出し位置に墨出しするための熟練を要し、更に手作業に伴う人為的なミスが発生する可能性があった。
【0004】
そこで、墨出しするに際して、作業者は、光学式の計測器を用いて正確な墨出し位置を計測し、その墨出し位置に墨出しするようになっている。これにより、作業者が墨出しに熟練していなくても、所定の精度が担保されるようになった。しかしながら、このような墨出し作業であっても作業者が手作業で墨出しすることには変わりないため、所定の工数が発生し、かつ、依然として人為的なミスが発生する可能性があった。
【0005】
そこで、近年では、自律的に走行して墨出し作業を行う墨出しロボットの使用が試みられつつある(例えば、特許文献1参照)。特許文献1に記載された墨出しロボットによれば、設備工事の墨出し作業を省力化することができ、墨出しに伴う人為的なミスの発生を抑止することができる。
【先行技術文献】
【特許文献】
【0006】
特開2021-042626号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に記載されている発明では、測量機の位置設定に用いた2本の基準芯(縦1本と横1本)を基に、墨出しする点の位置(XY座標)を計算する。しかし、この方法では、基準芯と墨点との距離が遠くなるほど、誤差が大きくなるという欠点がある。基準芯が斜めになっていても、それを基準にするためである。
【0008】
また、現場の職人は、たとえ図面と現場の基準芯とのずれがあっても、最寄りの基準芯からの距離が正しくなるように墨打ちする。つまり、ロボットの動作と職人の運用とにギャップがある。
そこで、本発明は、より正確にロボットの移動先の墨出しの位置を計測することを課題とする。
【課題を解決するための手段】
【0009】
前記した課題を解決するため、本発明のロボットシステムは、作業現場の基準芯または/および既知点、ならびに、ロボットの位置を計測する測量機と、前記基準芯または/および前記既知点を用いて、作業現場図面の座標における前記測量機の位置を確定する位置確定部と、前記基準芯または/および前記既知点のうち2つの組み合わせを用いて、前記作業現場図面の座標系を前記測量機の座標系に変換する変換部と、前記作業現場図面の座標系にて、前記ロボットの移動先として指定された目標位置に応じて、前記基準芯および前記既知点のうち2つ以上を特定し、前記変換部を用いて、前記作業現場図面の座標系における前記目標位置を、前記測量機の座標系に変換する座標計算部と、前記ロボットを移動させる走行駆動部と、前記走行駆動部を制御して、前記目標位置に、前記ロボットを移動させる制御部と、を有する。
【0010】
本発明のロボットの制御方法は、測量機により、作業現場の基準芯または/および既知点、ならびに、ロボットの位置を計測するステップと、位置確定部により、前記基準芯または/および前記既知点を用いて、作業現場図面の座標における前記測量機の位置を確定するステップと、変換部により、前前記基準芯または/および前記既知点のうち2つの組み合わせを用いて、前記作業現場図面の座標系を前記測量機の座標系に変換するステップと、座標計算部により、前記作業現場図面の座標系にて、前記ロボットの移動先として指定された目標位置に応じて、前記基準芯および前記既知点のうち2つ以上を特定し、前記変換部を用いて、前記作業現場図面の座標系における前記目標位置を、前記測量機の座標系に変換するステップと、制御部が、前記ロボットを移動させる走行駆動部を制御して、前記目標位置に、前記ロボットを移動させるステップと、を有する。
その他の手段については、発明を実施するための形態のなかで説明する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
差圧計
26日前
スガ試験機株式会社
環境試験機
6日前
アズビル株式会社
差圧計
25日前
株式会社高橋型精
採尿具
4日前
株式会社チノー
気体流量調整機構
20日前
株式会社トプコン
測量装置
10日前
株式会社チノー
気体流量調整機構
20日前
株式会社アトラス
計量容器
17日前
株式会社トプコン
測量装置
18日前
大和製衡株式会社
組合せ秤
25日前
アズビル株式会社
圧力センサ
25日前
株式会社ミツトヨ
変位測定器
25日前
アズビル株式会社
圧力センサ
20日前
アズビル株式会社
圧力センサ
20日前
株式会社島津製作所
分光光度計
20日前
株式会社トプコン
測量システム
11日前
株式会社関電工
内径測定装置。
4日前
東レ株式会社
選択結合性物質固定化担体
25日前
日本特殊陶業株式会社
ガスセンサ
6日前
日本碍子株式会社
ガスセンサ素子
26日前
積水樹脂株式会社
建築物用浸水測定装置
10日前
エスペック株式会社
環境形成装置
25日前
個人
レーザ距離計の計測用フォルダ
19日前
倉敷紡績株式会社
フィルム測定装置
4日前
日本碍子株式会社
センサ素子
26日前
上海海事大学
河川水位監視システム
18日前
日本碍子株式会社
センサ素子
26日前
株式会社島津製作所
熱分析システム
20日前
トヨタ自動車株式会社
校正システム
11日前
セコム株式会社
適応装置
26日前
ミツミ電機株式会社
流体センサ
4日前
三菱電機株式会社
絶縁検査装置
10日前
パイロットインキ株式会社
温度管理システム
24日前
マレリ株式会社
推定装置
24日前
ローム株式会社
半導体集積回路
24日前
株式会社XMAT
測定装置および方法
4日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ