TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024111676
公報種別
公開特許公報(A)
公開日
2024-08-19
出願番号
2023016314
出願日
2023-02-06
発明の名称
搬送装置、走行制御方法および走行制御プログラム
出願人
日本製鉄株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G05D
1/43 20240101AFI20240809BHJP(制御;調整)
要約
【課題】搬送装置等が周辺環境の変化が少ない狭い領域を走行する際等の自己位置推定をより正確に行うことができる。
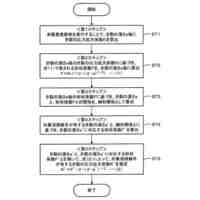
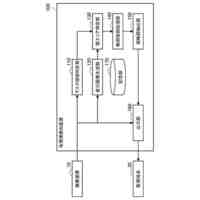
【解決手段】第1の3次元座標系で、搬送装置の位置と搬送装置の回転角とを推定する位置角度推定部と、位置角度推定部の推定結果に基づいて、角筒領域内の走行のための駆動信号を生成する駆動信号生成部と備え、位置角度推定部は、第2の3次元座標系で、角筒領域を含む搬送装置の周囲の物体に対応する点群を取得する点群取得部と、点群に基づいて、対となる柱によって規定される角筒領域の幅方向と平行な平面を検出する平面検出部と、平面を通過した回数と平面までの距離とに基づいて、第1の3次元座標系で、搬送装置の角筒領域の奥行方向における位置を算出し、平面に含まれる点群に基づいて、第1の3次元座標系で、搬送装置の角筒領域の幅方向における位置と、角筒領域の奥行方向に対する搬送装置の回転角とを算出する算出部とを備える。
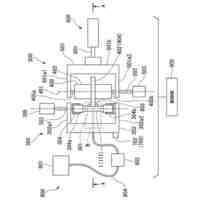
【選択図】図5
特許請求の範囲
【請求項1】
地面上を走行して角筒形の領域である角筒領域に進入する搬送装置であって、
前記角筒領域内には、前記搬送装置が進入する前記角筒領域の奥行方向に既知の間隔で、前記角筒領域の幅方向の両側で対となる柱が配置され、
前記角筒領域を基準とした座標系である第1の3次元座標系で、前記搬送装置の位置と前記搬送装置の回転角とを推定する位置角度推定部と、
前記位置角度推定部の推定結果に基づいて、前記角筒領域内の走行のための駆動信号を生成する駆動信号生成部と、
を備え、
前記位置角度推定部は、
前記搬送装置に取り付けられたセンサを用い、前記搬送装置を基準とした座標系である第2の3次元座標系で、前記角筒領域を含む前記搬送装置の周囲の物体に対応する点群を取得する点群取得部と、
前記点群に基づいて、前記対となる柱によって規定される前記角筒領域の幅方向と平行な平面を検出する平面検出部と、
前記平面を通過した回数と前記平面までの距離とに基づいて、前記第1の3次元座標系で、前記搬送装置の前記角筒領域の奥行方向における位置を算出し、前記平面に含まれる点群に基づいて、前記第1の3次元座標系で、前記搬送装置の前記角筒領域の幅方向における位置と、前記角筒領域の奥行方向に対する前記搬送装置の回転角とを算出する算出部と、
を備える、搬送装置。
続きを表示(約 1,300 文字)
【請求項2】
前記位置角度推定部は、前記平面検出部での処理の前に、
前記点群取得部で取得した前記点群から、所定の範囲外に位置する点群をフィルタリングする第1のフィルタリング処理を行う第1フィルタリング処理部と、
前記第1のフィルタリング処理を経て得られた点群をクラスタリングしてクラスタを生成するクラスタリング処理部と、
前記クラスタを、第2の3次元座標系におけるy軸上の位置に基づいてフィルタリングする第2のフィルタリング処理を行う第2フィルタリング処理部と、
を備える、請求項1に記載の搬送装置。
【請求項3】
前記算出部は、
前記点群の中で、高さ方向の座標の値が予め定められた範囲内の値であって、前記第2の3次元座標系で、前記幅方向の座標の値が0に最も近い負の値である第1の値を有する点と、前記幅方向の値が0に最も近い正の値である第2の値を有する点とを特定し、
前記角筒領域の幅と、前記第1の値と、前記第2の値とを用いて前記第1の3次元座標系における前記搬送装置の前記幅方向の位置を算出する、請求項1に記載の搬送装置。
【請求項4】
前記算出部は、
前記平面検出部により検出された平面に含まれる点群の前記第2の3次元座標系における座標から、前記平面を表す式の係数を算出し、前記係数を用いて前記角筒領域の奥行方向に対する前記搬送装置の回転角を算出する、請求項1に記載の搬送装置。
【請求項5】
地面上を走行して角筒形の領域である角筒領域に進入する搬送装置の走行制御方法であって、
前記角筒領域内には、前記搬送装置が進入する前記角筒領域の奥行方向に既知の間隔で、前記角筒領域の幅方向の両側で対となる柱が配置され、
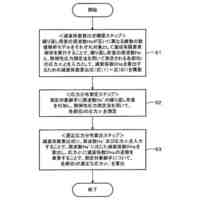
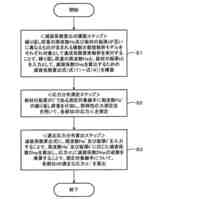
前記角筒領域を基準とした座標系である第1の3次元座標系で、前記搬送装置の位置と前記搬送装置の回転角とを推定する位置角度推定ステップと、
前記位置角度推定ステップの推定結果に基づいて、前記角筒領域内の走行のための駆動信号を生成する駆動信号生成ステップと、
を備え、
前記位置角度推定ステップは、
前記搬送装置に取り付けられたセンサを用い、前記搬送装置を基準とした座標系である第2の3次元座標系で、前記角筒領域を含む前記搬送装置の周囲の物体に対応する点群を取得する点群取得ステップと、
前記点群に基づいて、前記対となる柱によって規定される前記角筒領域の幅方向と平行な平面を検出する平面検出ステップと、
前記平面を通過した回数と前記平面までの距離とに基づいて、前記第1の3次元座標系で、前記搬送装置の前記角筒領域の奥行方向における位置を算出し、前記平面に含まれる点群に基づいて、前記第1の3次元座標系で、前記搬送装置の前記角筒領域の幅方向における位置と、前記角筒領域の奥行方向に対する前記搬送装置の回転角とを算出する算出ステップと、
を備える、搬送装置の走行制御方法。
【請求項6】
コンピュータに、請求項5に記載の走行制御方法を実行させる
ことを特徴とする走行制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送装置、走行制御方法および走行制御プログラムに関し、周辺環境の変化が少ない狭い領域を走行する際等の自己位置推定をより正確に行うことができる搬送装置、走行制御方法および走行制御プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
LiDAR(Light Detection And Ranging)を用い、搬送装置の周囲にある物体に対応する点群からなる点群情報を取得して、自己位置推定を行う技術が活用されている。LiDARは、搬送装置の周囲にある物体にレーザを照射し、レーザが当たった部分から反射された反射光を受光することで、周囲にある物体の存在や、当該物体までの距離等の周辺環境を認識可能な装置である。移動体が、移動しながら自己位置推定を行う際には、周辺環境の変化を認識することで自分の位置を推定することができる。
【0003】
例えば、特許文献1では、樹木が生い茂る環境で走行するトラクター等の移動体におけるLiDARを用いた自己位置推定手法が提案されている。
【0004】
また、特許文献2では、取得された点群情報を基に、機械学習を用いて低消費電力で自己位置推定を行うシステムが提案されている。特許文献1および特許文献2では地図情報も作成しながら自己位置を同時に推定するSLAM(Simultaneous Localization and Mapping)を行っており、作成された地図情報を基に自己位置を推定している。
【先行技術文献】
【特許文献】
【0005】
WO2022/107587
WO2021/205276
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、移動中に同じ景色が続く状況下では、周辺環境に変化が少なくなる。例えば、周辺環境に、所定の間隔で配置された同じ形状の構造物以外に特徴的な物体が存在しない場合には、周辺環境の変化が少なくなる。
【0007】
SLAMを用いた自己位置推定の場合、周辺環境の変化が少ないと、同じような点群情報が取得されるため、推定の精度が低下する。このため、例えば、周辺環境の変化が少ない狭い領域内を走行する移動体の走行制御には、SLAMだけでは不十分であり、さらに精度の高い自己位置推定が必要となる。
【0008】
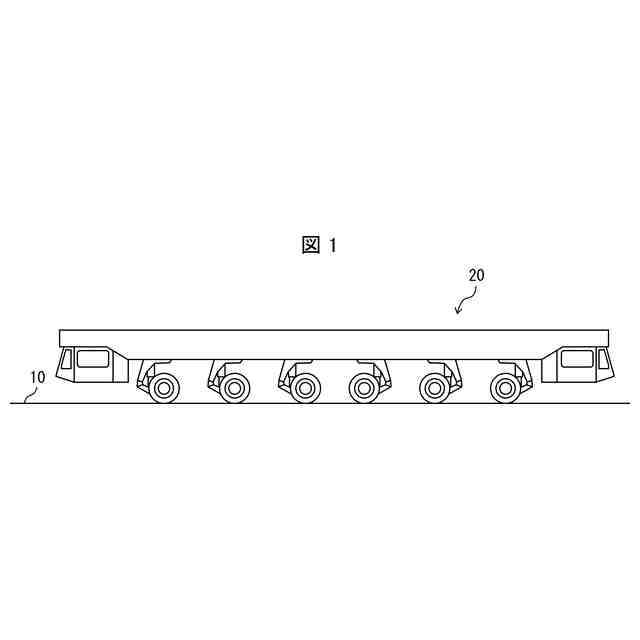
例えば、製鉄所のパレットヤードや、パレット内などでは、周辺環境の変化が少ないことから、自己位置推定が難しい状況になる。また、製鉄所内で鋼板などを搬送するキャリアは、パレット内に進入する必要があるが、パレット内には、キャリアの幅に対する空間的な余裕が少ないことから、精度の高い走行制御が必要となる。
【0009】
以上を踏まえ、本発明の一態様は、搬送装置等が周辺環境の変化が少ない狭い領域を走行する際等の自己位置推定をより正確に行うことができるようにする技術を実現することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決すべく、本発明の一態様に係る搬送装置は、地面上を走行して角筒形の領域である角筒領域に進入する搬送装置であって、前記角筒領域内には、前記搬送装置が進入する前記角筒領域の奥行方向に既知の間隔で、前記角筒領域の幅方向の両側で対となる柱が配置され、前記角筒領域を基準とした座標系である第1の3次元座標系で、前記搬送装置の位置と前記搬送装置の回転角とを推定する位置角度推定部と、前記位置角度推定部の推定結果に基づいて、前記角筒領域内の走行のための駆動信号を生成する駆動信号生成部と、を備え、前記位置角度推定部は、前記搬送装置に取り付けられたセンサを用い、前記搬送装置を基準とした座標系である第2の3次元座標系で、前記角筒領域を含む前記搬送装置の周囲の物体に対応する点群を取得する点群取得部と、前記点群に基づいて、前記対となる柱によって規定される前記角筒領域の幅方向と平行な平面を検出する平面検出部と、前記平面を通過した回数と前記平面までの距離とに基づいて、前記第1の3次元座標系で、前記搬送装置の前記角筒領域の奥行方向における位置を算出し、前記平面に含まれる点群に基づいて、前記第1の3次元座標系で、前記搬送装置の前記角筒領域の幅方向における位置と、前記角筒領域の奥行方向に対する前記搬送装置の回転角とを算出する算出部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本製鉄株式会社
鋼材
11日前
日本製鉄株式会社
鋼材
1か月前
日本製鉄株式会社
部品
3日前
日本製鉄株式会社
鋼材
17日前
日本製鉄株式会社
鋼材
11日前
日本製鉄株式会社
溶接継手
2日前
日本製鉄株式会社
構造部材
24日前
日本製鉄株式会社
熱間圧延鋼材
29日前
日本製鉄株式会社
転炉精錬方法
22日前
日本製鉄株式会社
捻回試験装置
3日前
日本製鉄株式会社
柱梁接合構造
12日前
日本製鉄株式会社
鋼の製造方法
11日前
日本製鉄株式会社
電車線柱構造
1か月前
日本製鉄株式会社
表面処理鋼材
3日前
日本製鉄株式会社
溶鉄の精錬方法
29日前
日本製鉄株式会社
多角形筒形構造
11日前
日本製鉄株式会社
コークスの製造方法
22日前
日本製鉄株式会社
コイルばねの製造方法
12日前
日本製鉄株式会社
素形材及びその製造方法
3日前
日本製鉄株式会社
ラインパイプ用電縫鋼管
12日前
日本製鉄株式会社
転がり疲労強度試験装置
24日前
日本製鉄株式会社
転がり疲労強度試験装置
24日前
日本製鉄株式会社
転がり疲労強度試験装置
24日前
日本製鉄株式会社
転がり疲労強度試験装置
24日前
日本製鉄株式会社
転がり疲労強度試験装置
24日前
日本製鉄株式会社
高力ボルト摩擦接合構造
11日前
日本製鉄株式会社
ハット形鋼矢板の製造方法
17日前
日本製鉄株式会社
試験システム及び試験方法
16日前
日本製鉄株式会社
Al脱酸鋼の連続鋳造方法
4日前
日本製鉄株式会社
転炉の吹錬終了温度設定方法
12日前
日本製鉄株式会社
鉄鉱石の還元気化脱リン方法
17日前
日本製鉄株式会社
鉄鉱石の還元気化脱リン方法
17日前
日本製鉄株式会社
溶接継手の応力拡大係数推定方法
9日前
日本製鉄株式会社
応力分布測定方法及びプログラム
17日前
日本製鉄株式会社
応力分布測定方法及びプログラム
17日前
日本製鉄株式会社
有視煙検知装置及び有視煙検知方法
26日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ