TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024109577
公報種別
公開特許公報(A)
公開日
2024-08-14
出願番号
2024069010,2022124180
出願日
2024-04-22,2018-12-20
発明の名称
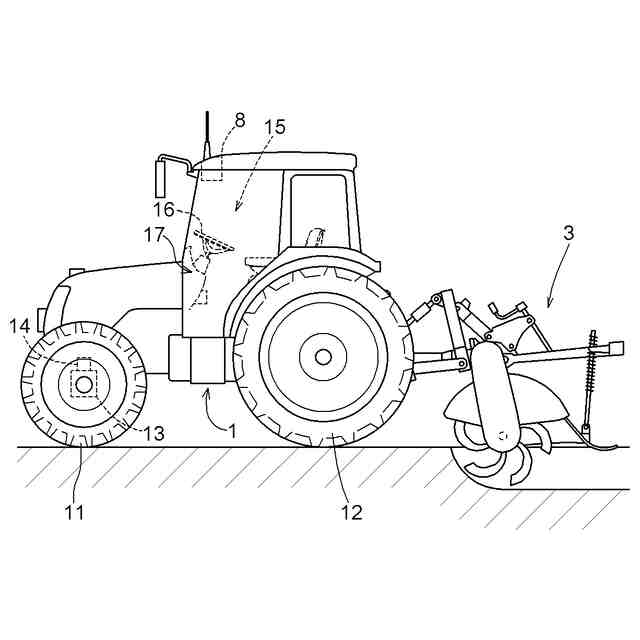
トラクタ
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
G05D
1/248 20240101AFI20240806BHJP(制御;調整)
要約
【課題】適切な表示が可能なトラクタを提供する。
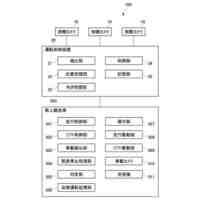
【解決手段】走行装置が備えられた機体と、航法衛星の測位信号に基づいて前記機体の位置情報の検出可能な位置検出部と、位置情報の経時的な検出に基づいて機体の走行軌跡を取得可能な走行軌跡取得部と、走行軌跡に基づいて目標方位を算定する目標方位算定部と、目標方位に基づいて目標走行経路を生成する目標生成経路設定部と、目標走行経路に沿って走行装置の操向を可能な操向制御部と、が備えられている。
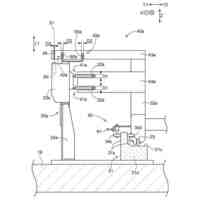
【選択図】図8
特許請求の範囲
【請求項1】
走行装置が備えられた機体と、
航法衛星の測位信号に基づいて前記機体の位置情報の検出可能な位置検出部と、
前記位置情報の経時的な検出に基づいて前記機体の走行軌跡を取得可能な走行軌跡取得部と、
前記走行軌跡に基づいて目標方位を算定する目標方位算定部と、
前記目標方位に基づいて目標走行経路を生成する目標生成経路設定部と、
前記目標走行経路に沿って前記走行装置の操向を可能な操向制御部と、
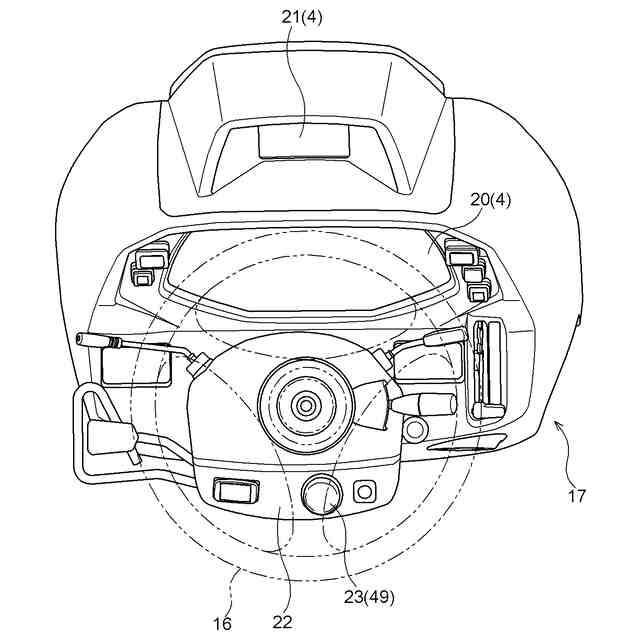
表示部と、
を備え、
前記表示部は、前記機体が前記目標走行経路に沿うように移動した後において、少なくとも前記機体が走行可能な次の目標走行経路を表示するトラクタ。
続きを表示(約 180 文字)
【請求項2】
前記表示部は、前記次の目標走行経路と、前記次の目標走行経路前に前記機体が走行し 前記目標走行経路とを区別できるように表示する請求項1に記載のトラクタ。
【請求項3】
前記表示部は、前記機体が前記目標走行経路に沿うように移動した後であって、前記機体を旋回中に、前記次の目標走行経路を表示する請求項1又は2に記載のトラクタ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラクタに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
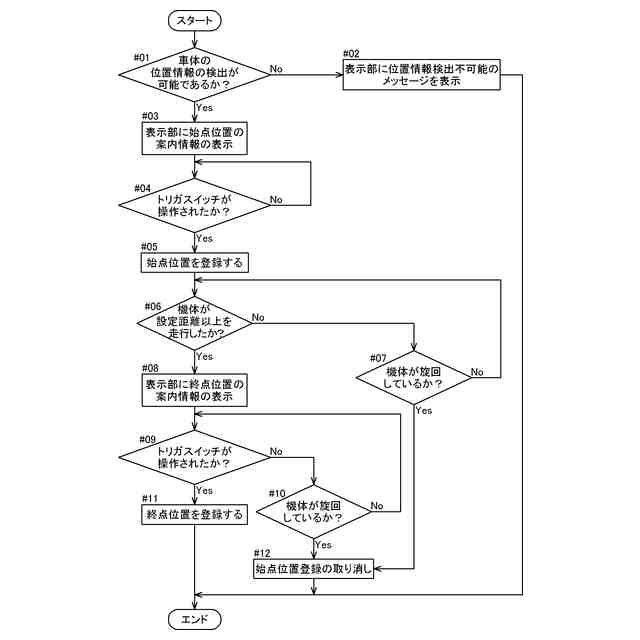
例えば特許文献1に開示された作業車では、衛星測位システムを用いて機体に関する位置情報を取得可能な位置検出部(文献では「受信装置」)と、位置検出部で取得された位置情報に基づいて目標方位に沿って機体の操向制御を可能な操向制御部(文献では「自動操向制御部」)と、が備えられている。また、自動操向制御の基準となる目標方位は、始点を登録する操作具(文献では「始点登録スイッチ」)と、終点を登録する操作具(文献では「終点登録スイッチ」)と、の夫々の操作が行われた際の夫々の位置に基づいて設定される。
【先行技術文献】
【特許文献】
【0003】
特開2018-148858号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された作業車では、始点と終点との登録が、各別かつ専用の操作具によって行われる。この構成であれば、始点と終点との登録の際に、搭乗者が操作具を押し間違える虞があり、その場合には始点及び終点の登録操作が搭乗者にとって煩わしいものとなる。また、操作具が、始点と終点との夫々の設定以外に、他の操作手段としても兼用される構成であれば、操作具の数が削減され、コスト面で有利である。
【0005】
本発明の目的は、適切な表示が可能なトラクタを提供することにある。
【課題を解決するための手段】
【0006】
本発明によるトラクタは、走行装置が備えられた機体と、航法衛星の測位信号に基づいて前記機体の位置情報の検出可能な位置検出部と、前記位置情報の経時的な検出に基づいて前記機体の走行軌跡を取得可能な走行軌跡取得部と、前記走行軌跡に基づいて目標方位を算定する目標方位算定部と、前記目標方位に基づいて目標走行経路を生成する目標生成経路設定部と、前記目標走行経路に沿って前記走行装置の操向を可能な操向制御部と、表示部と、を備え、前記表示部は、前記機体が前記目標走行経路に沿うように移動した後において、少なくとも前記機体が走行可能な次の目標走行経路を表示することを特徴とする。
上記構成において、前記表示部は、前記次の目標走行経路と、前記次の目標走行経路前に前記機体が走行し 前記目標走行経路とを区別できるように表示すると好適である。
上記構成において、前記表示部は、前記機体が前記目標走行経路に沿うように移動した後であって、前記機体を旋回中に、前記次の目標走行経路を表示すると好適である。
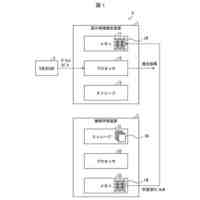
また、本発明による走行作業機は、航法衛星の測位信号に基づいて機体の位置情報の検出可能な位置検出部と、前記位置情報の経時的な検出に基づいて前記機体の走行軌跡を取得可能な走行軌跡取得部と、前記走行軌跡に基づいて目標方位を算定する目標方位算定部と、前記目標方位に沿って前記機体の操向制御を可能な操向制御部と、前記目標方位を算定する際に取得する前記走行軌跡の始点及び終点の両方を設定可能な一つの操作具と、が備えられていることを特徴とする。
【0007】
本発明によれば、始点と終点との夫々が一つの操作具で設定可能である。このため、始点と終点との登録の際に、各別の操作具が設けられる構成と比較して、搭乗者が操作具を押し間違える虞が軽減され、始点及び終点の登録操作が簡易になる。また、この一つの操作具が複数の操作手段として兼用されることによって、操作具の数が削減され、コスト面で有利になる。これにより、目標方位を算定する際の始点及び終点の設定を簡易な操作で可能な走行作業機が実現される。
【0008】
本発明において、前記目標方位算定部は、前記操作具の操作によって前記始点が設定され、かつ、前記始点の設定後に前記機体が予め設定された距離を走行した後に、前記操作具の操作による前記終点の設定が可能となるように構成されていると好適である。
【0009】
本構成であれば、始点の設定後に機体が必ず走行して、始点と異なる位置に終点の設定が可能となる。また、本構成であれば、始点と終点との距離が予め設定された距離以上に離れることによって、所定の精度以上で目標方位の算定が可能となる。
【0010】
本発明において、前記目標方位の設定に関する情報を表示可能な表示部が備えられ、前記操作具の操作による前記終点の設定が可能となった場合、前記表示部は、前記終点の設定が可能となったことを表示すると好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
倉庫システム
6日前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業車
3日前
株式会社クボタ
歪み領域推定装置、歪み領域推定方法、機械学習装置、及び機械学習方法
6日前
井関農機株式会社
作業車両
2か月前
株式会社FUJI
工作機械
18日前
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
定電圧回路
2か月前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
井関農機株式会社
自立走行農作業車
2か月前
トヨタ自動車株式会社
移動システム
2か月前
トヨタ自動車株式会社
制御システム
1か月前
日昌電気制御株式会社
管理システム
1か月前
トヨタ自動車株式会社
設備の制御方法
2か月前
株式会社ユタカ
半自動切換装置
1か月前
井関農機株式会社
作業車両の作業管理システム
2か月前
株式会社ダイフク
搬送設備
17日前
トヨタ自動車株式会社
マーカースタンド
1か月前
横河電機株式会社
電流源回路
2か月前
株式会社豊田自動織機
自律走行車両
1か月前
株式会社フカデン
外周部加工システム
6日前
住友重機械工業株式会社
自律走行台車
2か月前
日立建機株式会社
自律走行システム
10日前
個人
ペダル操作検知装置
2か月前
株式会社デンソー
移動体制御装置
3日前
ミツミ電機株式会社
半導体集積回路装置
1か月前
大阪瓦斯株式会社
二次圧制御機構
13日前
三菱電機株式会社
管理システムおよび管理方法
2か月前
大阪瓦斯株式会社
二次圧制御機構
13日前
アズビル株式会社
パラメータ探索装置および方法
2か月前
横河電機株式会社
電圧電流変換回路
1か月前
株式会社デンソー
車両用電子制御装置
1か月前
エンゼルグループ株式会社
無人搬送システム
1か月前
株式会社ダイフク
搬送設備の検査装置
13日前
ニチコン株式会社
電源装置
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ