TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024089304
公報種別
公開特許公報(A)
公開日
2024-07-03
出願番号
2022204582
出願日
2022-12-21
発明の名称
作業機械の監視システム
出願人
コベルコ建機株式会社
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20240626BHJP(水工;基礎;土砂の移送)
要約
【課題】作業現場における作業機械の周辺の画像を精度良く取得することが可能な作業機械の監視システムを提供する。
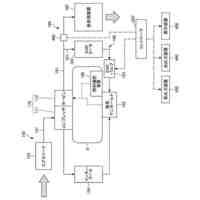
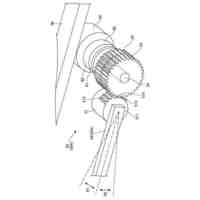
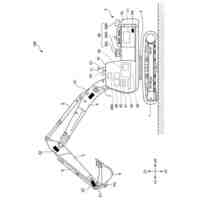
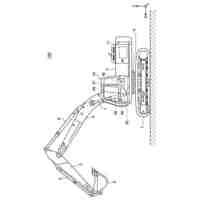
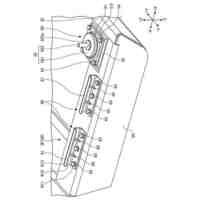
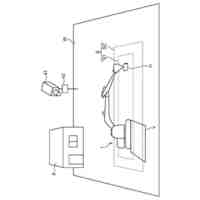
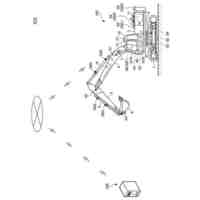
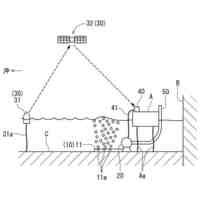
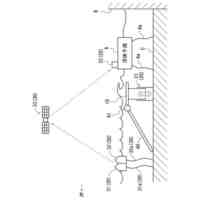
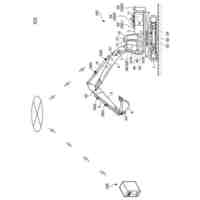
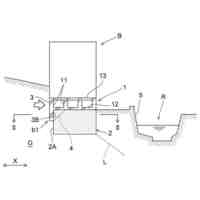
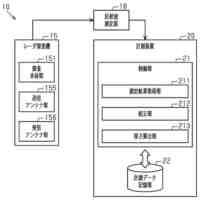
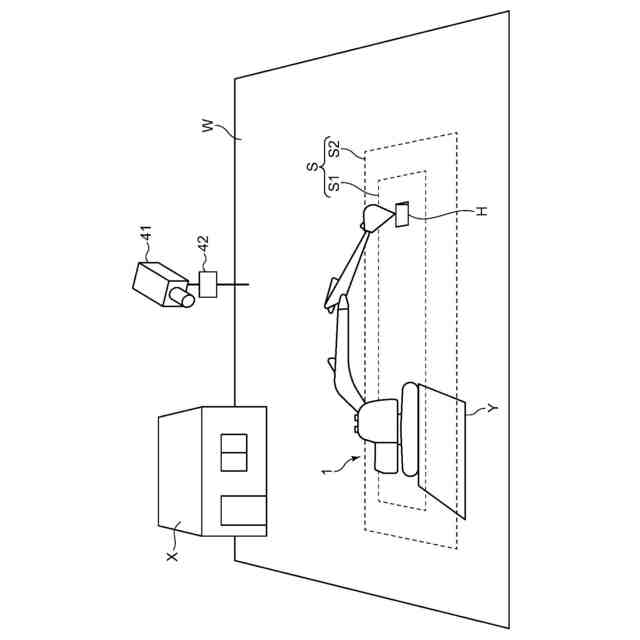
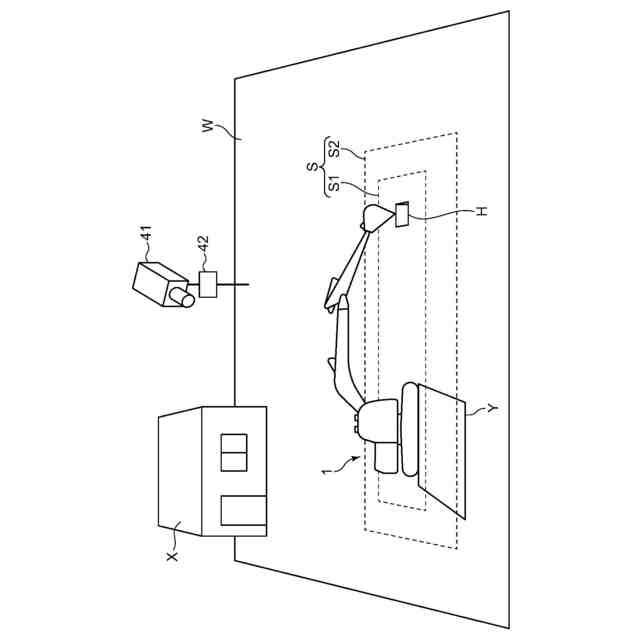
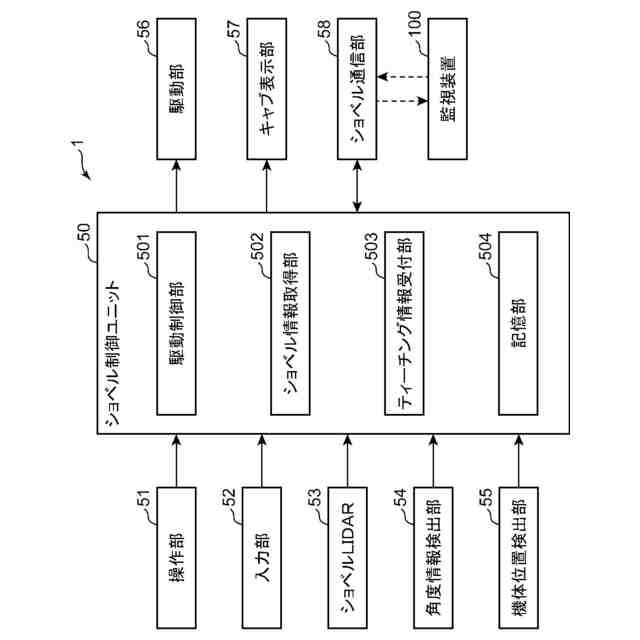
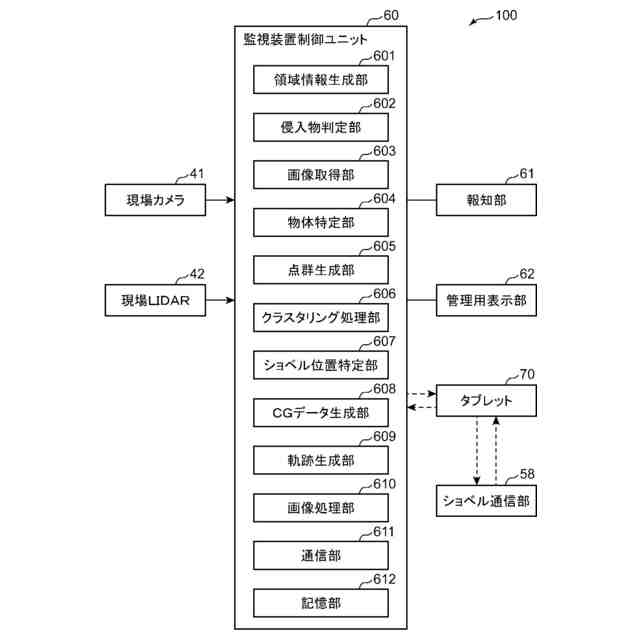
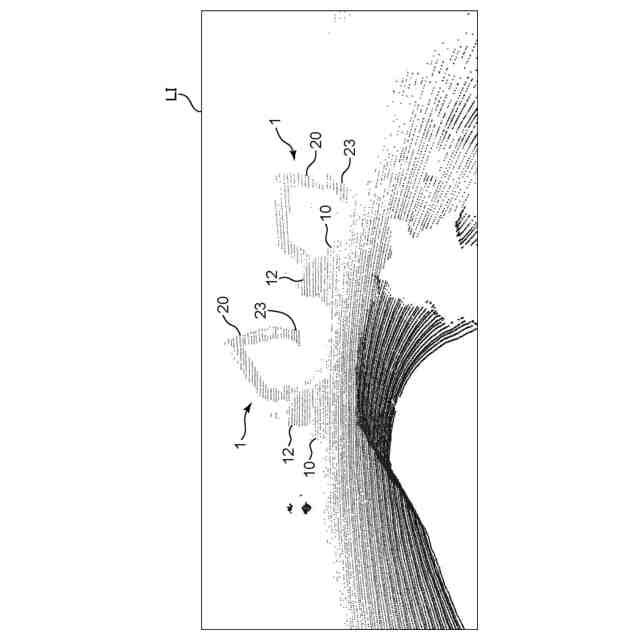
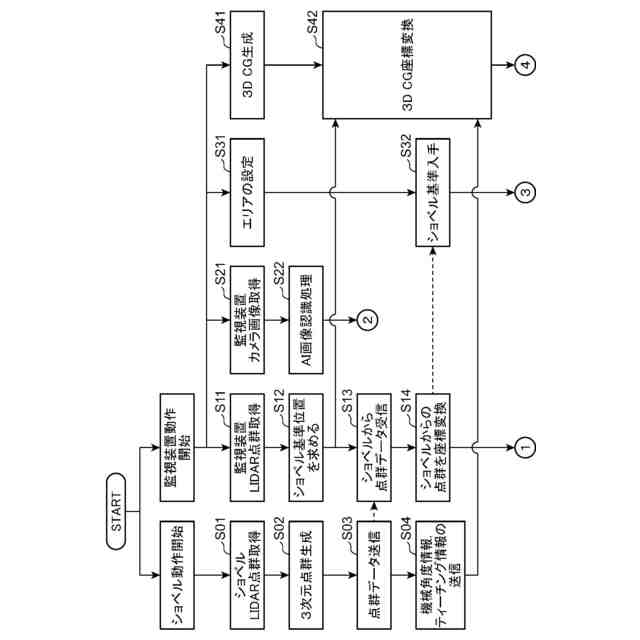
【解決手段】監視装置100は、油圧ショベル1に装着されたショベルLIDAR53と、作業現場Wに設置された現場LIDAR42と、監視装置制御ユニット60とを有する。監視装置制御ユニット60は、ショベルLIDAR53の第1距離分布から第1点群画像を生成するとともに、現場LIDAR42の前記第2距離分布から第2点群画像を生成し、前記第1点群画像及び前記第2点群画像を同じ座標系で合成して3次元の合成画像を生成し、当該合成画像に対応する指令信号を出力する。
【選択図】図2
特許請求の範囲
【請求項1】
作業現場において移動可能な作業機械に装着され、前記作業機械の周辺の対象物までの3次元の第1距離分布を取得する第1距離分布取得部と、
前記作業現場に設置され、前記作業現場の対象物までの3次元の第2距離分布を取得する第2距離分布取得部と、
前記第1距離分布から第1点群画像を生成するとともに前記第2距離分布から第2点群画像を生成し、前記第1点群画像及び前記第2点群画像を同じ座標系で合成して3次元の合成画像を生成し、前記合成画像に対応する指令信号を出力する制御部と、
を備える、作業機械の監視システム。
続きを表示(約 1,300 文字)
【請求項2】
前記合成画像に対応する指令信号を受け入れ、前記合成画像を表示する画像表示部を更に備える、請求項1に記載の作業機械の監視システム。
【請求項3】
前記制御部は、前記作業機械の人工画像を生成し、前記作業現場における前記作業機械の位置に応じて前記第1点群画像及び前記第2点群画像に前記人工画像を更に重畳して前記合成画像を生成する、請求項2に記載の作業機械の監視システム。
【請求項4】
前記作業機械の姿勢に関する情報である姿勢情報を取得する姿勢情報取得部を更に備え、
前記制御部は、前記姿勢情報取得部によって取得される前記姿勢情報に応じて、前記合成画像上の前記人工画像の姿勢を調整する、請求項3に記載の作業機械の監視システム。
【請求項5】
入力される報知信号に応じて、警告情報を報知する報知部を更に備え、
前記制御部は、前記作業現場における前記作業機械の周辺に監視領域を設定し、前記第1点群画像及び前記第2点群画像のうちの少なくとも一方に基づいて前記監視領域に対する物体の侵入を検知することが可能であり、前記物体の侵入を検知した場合に当該侵入に対応する前記報知信号を前記報知部に入力する、請求項1または2に記載の作業機械の監視システム。
【請求項6】
前記制御部は、前記第1点群画像及び前記第2点群画像のうちの少なくとも一方に対してクラスタリング処理を行うことで前記物体を特定する、請求項5に記載の作業機械の監視システム。
【請求項7】
前記報知部は、前記作業現場に配置され、入力される前記報知信号に応じた報知表示または報知音によって前記警告情報を報知する、請求項5に記載の作業機械の監視システム。
【請求項8】
前記制御部は、前記作業現場における前記作業機械の周辺に監視領域を設定し、前記第1点群画像及び前記第2点群画像のうちの少なくとも一方に基づいて前記監視領域に対する物体の侵入を検知することが可能であり、前記物体の侵入を検知した場合、前記第1点群画像及び前記第2点群画像に前記侵入を報知するための警告情報を更に重畳して前記合成画像を生成する、請求項2に記載の作業機械の監視システム。
【請求項9】
前記作業現場に設置され、前記作業現場の画像を撮影可能な撮像部を更に備え、
前記制御部は、前記撮像部によって撮影された撮影画像に含まれる物体の特性を識別することが可能であり、前記撮影画像に含まれる前記物体に対応する点群画像である物体点群画像を前記第1点群画像及び前記第2点群画像のうちの少なくとも一方の中で特定し、前記特性に関する画像を前記物体点群画像に関連付けるように前記合成画像を生成する、請求項1または2に記載の作業機械の監視システム。
【請求項10】
前記作業機械の動きを遠隔操作又は管理するための遠隔装置に対して、前記合成画像を含む信号を送信する送信部を更に備える、請求項1または2に記載の作業機械の監視システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の監視システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
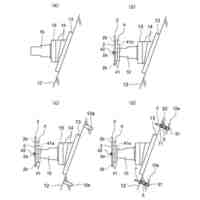
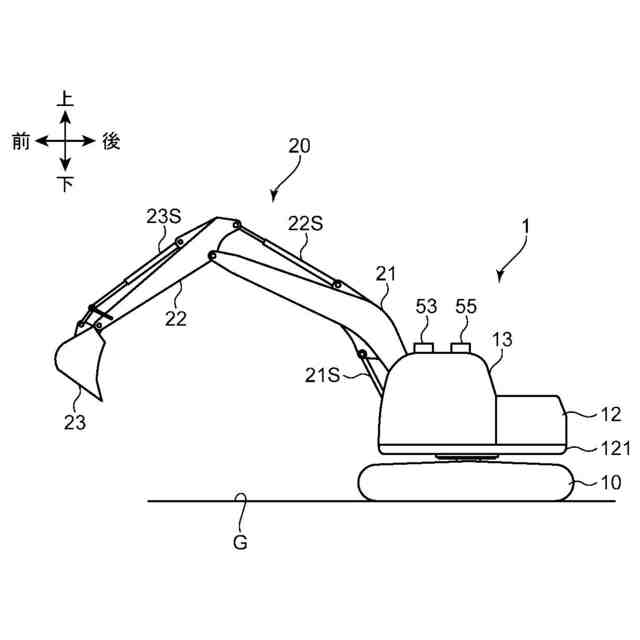
従来から、作業現場において所定の作業を行う作業機械が知られている。作業機械は、機体と、当該機体に移動可能に支持された作業アタッチメントとを有する。特許文献1には、作業アタッチメントの先端部に取り付けられたライダーと、プロセッサと、ディスプレイとを備える作業機械が開示されている。ライダーは、作業機械の少なくとも一部までの距離と、作業機械の周辺の対象物までの距離とをそれぞれ測定する。また、プロセッサは、ライダーが測定した距離に基づいて、作業機械の位置データを取得する。また、プロセッサは、前記位置データに基づいて、作業機械の少なくとも一部と作業機械の周辺との位置を示す画像を形成する。ディスプレイは、プロセッサから受け取る信号に基づいて、前記画像を表示する。
【先行技術文献】
【特許文献】
【0003】
特開2020-117913号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術では、作業アタッチメントに装着されたライダーの死角の画像を得ることができないため、作業機械の周囲の充分な画像情報を得ることができないという問題がある。
【課題を解決するための手段】
【0005】
本発明の目的は、作業現場における作業機械の周辺の画像を精度良く取得することが可能な作業機械の監視システムを提供することにある。
【0006】
本発明によって提供されるのは、作業機械の監視システムである。当該監視システムは、第1距離分布取得部と、第2距離分布取得部と、制御部と、を備える。前記第1距離分布取得部は、作業現場において移動可能な作業機械に装着され、前記作業機械の周辺の対象物までの3次元の第1距離分布を取得する。第2距離分布取得部は、前記作業現場に設置され、前記作業現場の対象物までの3次元の第2距離分布を取得する。前記制御部は、前記第1距離分布から第1点群画像を生成するとともに前記第2距離分布から第2点群画像を生成し、前記第1点群画像及び前記第2点群画像を同じ座標系で合成して3次元の合成画像を生成し、前記合成画像に対応する指令信号を出力する。
【0007】
本構成によれば、作業機械に装着された第1距離分布取得部及び作業現場に設置された第2距離分布取得部の各々の距離分布から得られた点群画像を合成することで、各距離分布取得部の検出範囲外の画像を互いに補うことができるため、いずれか一方の距離分布取得部に基づいた画像を取得する場合と比較して、作業現場における作業機械の周辺の情報を精度良く取得することができる。このため、作業機械の作業精度、作業効率及び安全性を高めることが可能になる。
【0008】
上記の構成において、前記合成画像に対応する指令信号を受け入れ、前記合成画像を表示する画像表示部を更に備えるものでもよい。
【0009】
本構成によれば、第1距離分布取得部及び第2距離分布取得部のいずれか一方の距離分布取得部に基づいた画像を画像表示部に表示する場合と比較して、作業現場における作業機械の周辺の画像を精度良く表示することができる。このため、作業機械の作業精度、作業効率及び安全性を高めることが可能になる。
【0010】
例えば、画像表示部が作業機械内のキャブに配置される場合には、作業機械を操作する作業者に対して周辺の画像を精度良く提供することができる。また、画像表示部が作業機械から離れた場所に配置される場合には、作業機械を遠隔操作する作業者又は作業機械の自動運転を見守る管理者に対して、作業機械の周辺の画像を精度良く提供することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社熊谷組
基礎構造
8日前
住友建機株式会社
ショベル
2日前
株式会社フジタ
重機監視システム
4日前
住友建機株式会社
ショベル
1日前
住友建機株式会社
建設機械
3日前
住友建機株式会社
ショベル
3日前
住友建機株式会社
ショベル
8日前
住友建機株式会社
ショベル
1日前
丸紅建材リース株式会社
切梁装置
16日前
住友建機株式会社
ショベル
1日前
大和ハウス工業株式会社
建物
4日前
日本車輌製造株式会社
建設機械
4日前
株式会社大阪防水建設社
遮水壁の構築方法
8日前
ブラザー工業株式会社
空調システム
10日前
株式会社竹中工務店
建物のレベル調整構造
15日前
株式会社新生工務
建物用基礎の製造方法。
15日前
前田工繊株式会社
吹付基盤材
11日前
株式会社エスイー
地盤アンカー頭部定着部の拘束装置
15日前
コベルコ建機株式会社
作業機械の監視システム
2日前
住友重機械工業株式会社
ショベル、及び作業機械
15日前
住友建機株式会社
ショベル、ショベルの管理方法
4日前
株式会社安藤・間
締切構造
8日前
住友重機械工業株式会社
ショベルの遠隔制御システム
4日前
愛三工業株式会社
波浪抑制システム
4日前
愛三工業株式会社
波浪抑制システム
8日前
大成建設株式会社
排土システム
1日前
株式会社システムプランニング
地盤改良装置
10日前
コベルコ建機株式会社
作業機械の制御システム及び制御方法
1日前
住友重機械工業株式会社
作業機械の管理システム、作業機械
1日前
株式会社竹中工務店
片土圧による水平荷重を受ける建物の基礎構造
1日前
東亜建設工業株式会社
矢板の打設方法
1日前
大成建設株式会社
土砂集積搬出システムと土砂集積搬出方法
1日前
強化土エンジニヤリング株式会社
地盤注入工法
1日前
株式会社竹中工務店
二酸化炭素固定方法
8日前
株式会社IHIインフラ建設
研修施設
9日前
株式会社大林組
かぶり厚さ計測方法及びかぶり厚さ計測システム
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ