TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024089829
公報種別
公開特許公報(A)
公開日
2024-07-04
出願番号
2022205281
出願日
2022-12-22
発明の名称
作業機械の制御システム及び制御方法
出願人
コベルコ建機株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20240627BHJP(水工;基礎;土砂の移送)
要約
【課題】オペレータの十分な認識を伴いながら作業モードに応じた適切な動作制限制御が実行されることを可能にする制御システムが提供される。
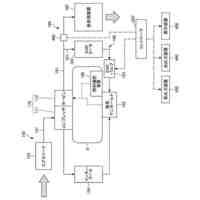
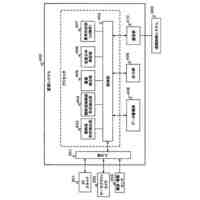
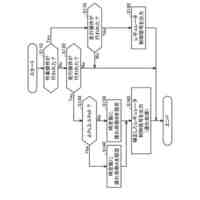
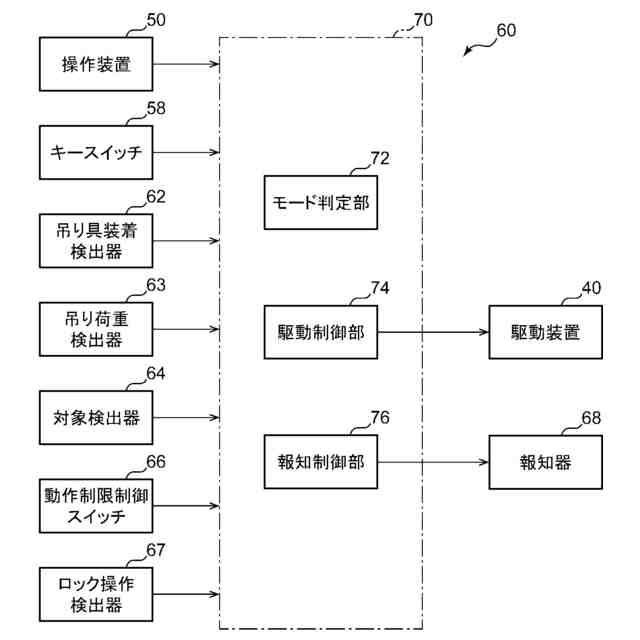
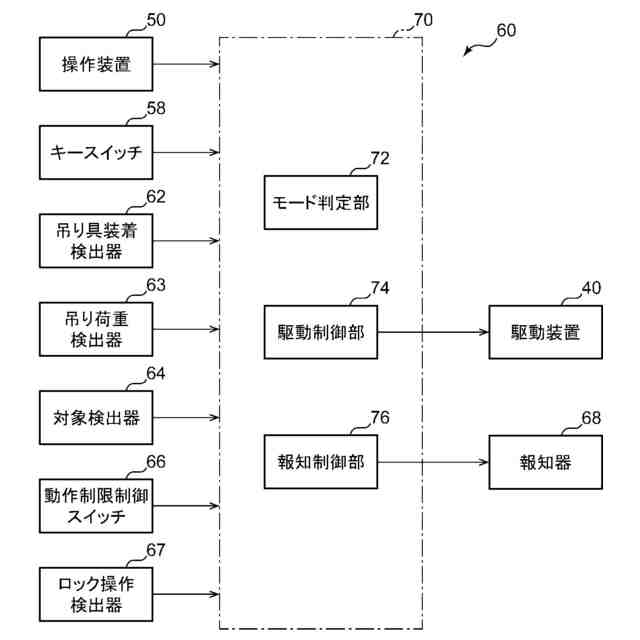
【解決手段】制御システム60は、作業モードを検出するモード検出器62と、監視対象を検知する対象検知器64と、オペレータへの報知が可能な報知器68と、監視対象の検知に基づく動作制限制御を行うコントローラ70と、動作制限制御を停止させるための停止操作が与えられることが可能な動作制限制御スイッチ66と、を備える。コントローラ70は、動作制限制御の実行中でかつ吊り作業モードが検出されているときに停止操作を促す停止指示を報知器に報知させ、動作制限制御スイッチ66に停止操作が与えられるまでは動作制限制御を継続し、停止操作が与えられた時点で動作制限制御を停止する。
【選択図】図2
特許請求の範囲
【請求項1】
吊り作業モードを含む複数の作業モードを有する作業機械のための制御システムであって、
前記作業モードを検出するモード検出器と、
前記作業機械の周辺の監視対象を検知する対象検知器と、
オペレータに報知を行うことが可能な報知器と、
前記監視対象の検知に基づいて前記作業機械の動作を制限する動作制限制御を行うことが可能なコントローラと、
オペレータによる停止操作が与えられることが可能な動作制限制御スイッチと、を備え、
前記コントローラは、前記動作制限制御の実行中でかつ前記吊り作業モードが検出されているときに前記停止操作を促す停止指示を前記報知器に報知させ、前記動作制限制御スイッチに前記停止操作が与えられるまでは前記動作制限制御を継続し、前記停止操作が与えられた時点で前記動作制限制御を停止するように、構成されている、制御システム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の制御システムであって、前記コントローラは、前記動作制限制御スイッチに前記停止操作が与えられた場合にのみ前記動作制限制御を停止させるように構成されている、制御システム。
【請求項3】
請求項1に記載の制御システムであって、前記コントローラにより行われる前記動作制限制御は、前記作業機械の動作を減速させる制御を含む、制御システム。
【請求項4】
請求項1に記載の制御システムであって、前記作業機械による吊り作業の実行を検知する吊り作業検知器をさらに備え、前記コントローラは、前記停止指示の報知後に前記吊り作業検知器が前記吊り作業の実行を検知したときに前記停止指示の追加報知を前記報知器に行わせるように構成されている、制御システム。
【請求項5】
請求項1に記載の制御システムであって、ロック操作を検出するロック操作検出器をさらに備え、前記ロック操作は、前記作業機械を動作させるためのオペレータによる作業操作を無効にするための操作であり、前記コントローラは、前記ロック操作が検出されているときには前記作業モードにかかわらず前記報知器による前記停止指示の報知を停止させる一方、前記ロック操作の検出がなくかつ前記動作制限制御の実行中で前記吊り作業モードが検出されているときに前記報知器に前記停止指示の報知を行わせるように構成されている、制御システム。
【請求項6】
請求項1に記載の制御システムであって、前記作業機械は動力源を備え、前記コントローラは、前記動力源が始動されたときに前記動作制限制御を自動的に実行し、前記動力源の始動時点で前記作業モードが前記吊り作業モードであるときに前記報知器に前記停止指示の報知を行わせるように構成されている、制御システム。
【請求項7】
請求項5に記載の制御システムであって、前記作業機械は動力源を備え、前記コントローラは、前記動力源が始動されたときに前記動作制限制御を自動的に実行し、前記動力源の始動時点で前記作業モードが前記吊り作業モードであり、かつ前記ロック操作が検出されていないときにのみ前記報知器に前記停止指示の報知を行わせるように構成されている、制御システム。
【請求項8】
請求項1に記載の制御システムであって、前記動作制限制御スイッチには前記停止操作に加えて停止解除操作が与えられることが可能であり、前記コントローラは、前記動作制限制御の停止中では前記停止解除操作が与えられた場合にのみ前記動作制限制御を再開するように構成されている、制御システム。
【請求項9】
請求項1~8のいずれかに記載の制御システムであって、前記コントローラは、前記作業モードが前記吊り作業モード以外の作業モードであって前記動作制限制御が停止しているときに、当該動作制限制御が停止していることの報知を前記報知器に行わせるように構成されている、制御システム。
【請求項10】
吊り作業モードを含む複数の作業モードを有する作業機械のための制御方法であって、
オペレータにより動作制限制御スイッチに停止操作が与えられるまでは監視対象の検知に基づいて前記作業機械の動作を制限する動作制限制御を行うことと、
前記動作制限制御スイッチに前記停止操作が与えられることにより前記動作制限制御を停止することと、
前記動作制限制御の実行中でかつ前記吊り作業モードが検出されているときに前記停止操作を促す停止指示を報知器に報知させることと、を含む、制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、吊り作業を行う機能とそれ以外の作業を行う機能とを併有する作業機械のための制御システム及び制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
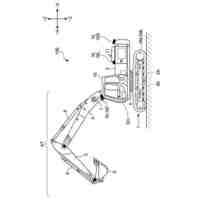
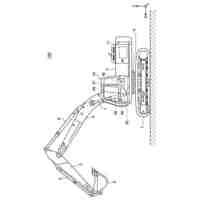
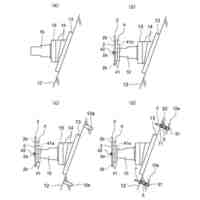
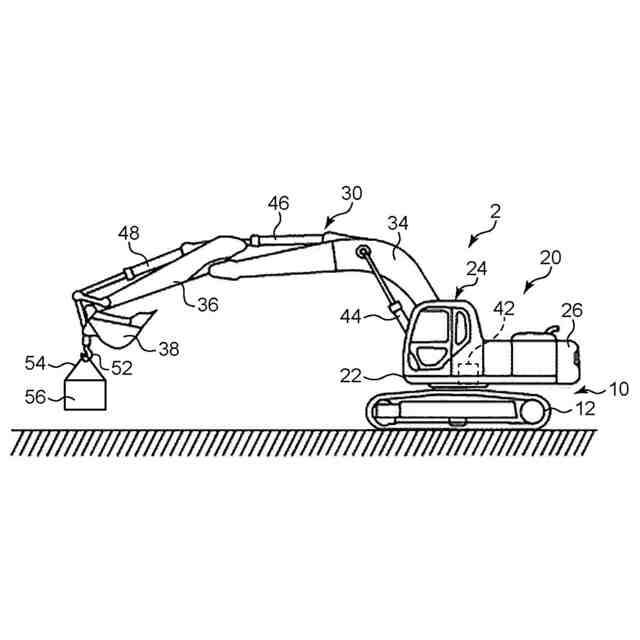
従来、吊り作業を行う機能とそれ以外の作業(通常作業)を行う機能とを併有する作業機械が知られている。当該作業機械は、前記通常作業、例えば、アタッチメント先端のバケットを用いた掘削等の作業、を行う機能に加え、当該アタッチメント先端に荷吊り用のフックが装着されることにより前記吊り作業機能を発揮することが可能なものである。
【0003】
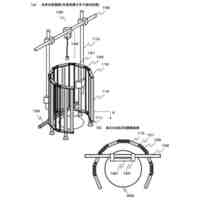
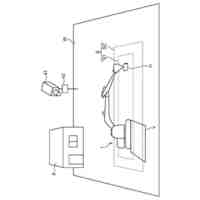
一方、作業機械の周辺を監視して動作制限制御を行うシステムが知られている。当該システムは、一般に、前記作業機械の周辺の監視対象を検知する検知器と、当該検知器が当該監視対象を検知したときに動作制限制御、例えば作業機械の動作の制限や警告の報知、を行う制御装置と、を含む。
【0004】
前記吊り作業機能を備えた作業機械に前記動作制限制御のためのシステムが適用された場合、前記吊り作業中に前記動作制限制御が実行されると却って安全性の低下を招く場合が生じ得る。具体的に、前記吊り作業では、前記アタッチメント先端からワイヤロープ等を介して吊り荷が吊下げられた状態にあるため、当該吊り作業中に前記動作制限制御指令が出力されて前記作業機械の動作が強制的に急減速され、あるいは発せられた警告に対応してオペレータが急停止操作をした場合、前記吊り荷がその慣性によって大きく揺れるおそれがある。
【0005】
特許文献1は、前記のような吊り作業中における接触回避制御の実行による吊り荷の大きな揺れを防ぐため、吊り作業モードにおいて有効化スイッチがオフにされているときには障害物検出センサが障害物を検出した場合でも操作装置の操作量に応じて車体又は作業装置の動作を制御すること、つまり動作制限をしないこと、を、開示する。
【先行技術文献】
【特許文献】
【0006】
特開2021-71000号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に記載された技術では、有効化スイッチがオフにされたまま作業モードが吊り作業モード以外のモードから吊り作業モードに切換えられたときに前記動作制限処理すなわち動作制限制御が自動的に解除されてしまうため、オペレータが当該動作制限制御の解除を十分に認識できないおそれがある。換言すれば、オペレータが認識することなく前記動作制限制御が自動的に解除されるおそれがある。
【課題を解決するための手段】
【0008】
本発明は、オペレータの十分な認識を伴いながら作業モードに応じた適切な動作制限制御が実行されることを可能にする制御システム及び制御方法を提供することを目的とする。
【0009】
提供されるのは、作業機械のための制御システムであり、前記作業機械は、吊り作業モードを含む複数の作業モードを有する。前記制御システムは、モード検出器と、対象検知器と、動作制限制御スイッチと、報知器と、コントローラと、を備える。前記モード検出器は、前記作業モードを検出する。前記対象検知器は、前記作業機械の周辺の監視対象を検知する。前記報知器は、オペレータに報知を行うことが可能である。前記コントローラは、前記監視対象の検知に基づいて前記作業機械の動作を制限する動作制限制御を行うことが可能である。前記動作制限制御スイッチには、オペレータによる停止操作が与えられることが可能である。前記コントローラは、前記動作制限制御の実行中でかつ前記吊り作業モードが検出されているときに前記停止操作を促す停止指示を前記報知器に報知させ、前記動作制限制御スイッチに前記停止操作が与えられるまでは前記動作制限制御を継続し、前記停止操作が与えられた時点で前記動作制限制御を停止するように、構成されている。
【0010】
前記制御システムにおける前記コントローラは、前記動作制限制御の実行中でかつ前記吊り作業モードが検出されているときに前記停止指示を前記報知器に報知させてオペレータに前記動作制限制御の停止のための前記停止操作を促すことにより、前記吊り作業モードでの吊り作業中に前記動作制限制御が実行されること、つまり前記作業機械の動作が制限されること、に起因する吊り荷の大きな揺れを有効に抑止することができる。しかも、前記コントローラは、前記動作制限制御スイッチに前記停止操作が与えられるまでは前記動作制限制御を継続し、オペレータが実際に前記動作制限制御スイッチに前記停止操作が与えられることによりはじめて前記動作制限制御を停止するので、当該動作制限制御の停止がオペレータによって確実に認識されることを可能にする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本ソリッド株式会社
衝撃吸収体
25日前
株式会社熊谷組
基礎構造
11日前
住友建機株式会社
ショベル
5日前
住友建機株式会社
ショベル
6日前
株式会社フジタ
重機監視システム
7日前
住友建機株式会社
ショベル
4日前
住友建機株式会社
ショベル
11日前
住友建機株式会社
ショベル
4日前
丸紅建材リース株式会社
切梁装置
19日前
住友建機株式会社
ショベル
4日前
住友建機株式会社
建設機械
6日前
大和ハウス工業株式会社
建物
7日前
株式会社クボタ
作業機
今日
株式会社クボタ
作業機
今日
株式会社クボタ
作業機
今日
株式会社クボタ
作業機
今日
株式会社クボタ
作業機
今日
日本車輌製造株式会社
建設機械
7日前
日立建機株式会社
作業機械
26日前
個人
建物の立ち上がり基礎の逆U字形捨て型枠
今日
個人
建物の立ち上がり基礎のパネル式捨て型枠
今日
ブラザー工業株式会社
空調システム
13日前
株式会社大阪防水建設社
遮水壁の構築方法
11日前
株式会社竹中工務店
建物のレベル調整構造
18日前
株式会社進富
杭基礎構造
1か月前
コベルコ建機株式会社
作業機械
21日前
大和ハウス工業株式会社
監視用システム
21日前
前田工繊株式会社
吹付基盤材
14日前
コベルコ建機株式会社
電動油圧式作業機械
今日
株式会社新生工務
建物用基礎の製造方法。
18日前
ヤンマーホールディングス株式会社
作業機械
1か月前
日本製鉄株式会社
堤防
28日前
株式会社エスイー
地盤アンカー頭部定着部の拘束装置
18日前
特殊梯子製作所有限会社
作業用梯子の吊下設置構造物
1か月前
コベルコ建機株式会社
作業機械の監視システム
5日前
日本製鉄株式会社
鋼管杭及び鋼管杭の施工方法
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ