TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024088932
公報種別
公開特許公報(A)
公開日
2024-07-03
出願番号
2022203983
出願日
2022-12-21
発明の名称
情報処理装置、制御方法及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/14 20060101AFI20240626BHJP(信号)
要約
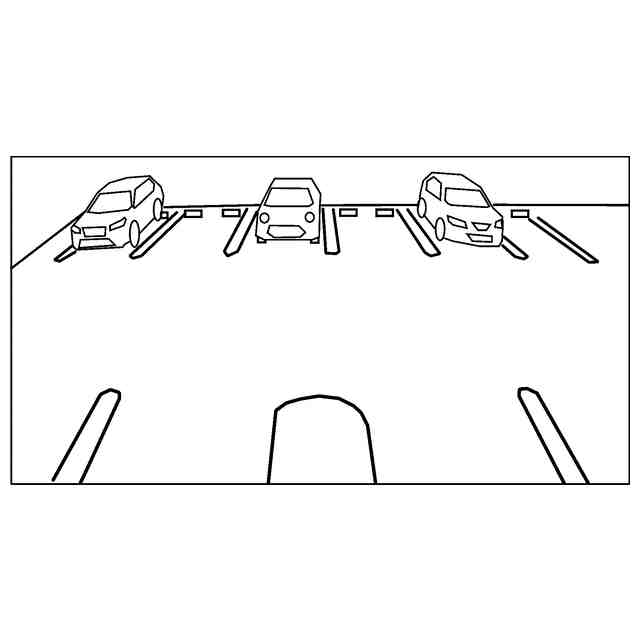
【課題】駐車スペースへの案内を改善することである。
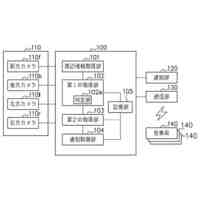
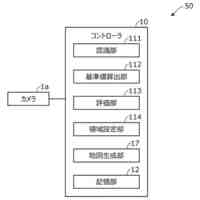
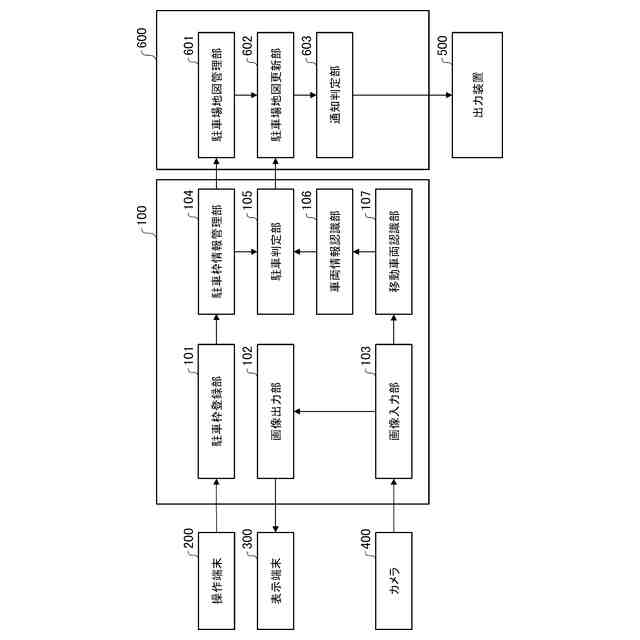
【解決手段】駐車スペース及びその周辺を撮影した撮影画像を入力する画像入力手段と、前記駐車スペースについての駐車枠情報を登録する登録手段と、前記駐車枠情報を管理する管理手段と、前記撮影画像から移動車両を認識する移動車両認識手段と、前記移動車両の車両情報を認識する車両情報認識手段と、前記駐車枠情報及び前記車両情報に基づき、前記移動車両が駐車行動中か否かを判定する駐車判定手段と、を有することを特徴とする。
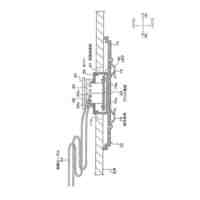
【選択図】図1
特許請求の範囲
【請求項1】
駐車スペース及びその周辺を撮影した撮影画像を入力する画像入力手段と、
前記駐車スペースについての駐車枠情報を登録する登録手段と、
前記駐車枠情報を管理する管理手段と、
前記撮影画像から移動車両を認識する移動車両認識手段と、
前記移動車両の車両情報を認識する車両情報認識手段と、
前記駐車枠情報及び前記車両情報に基づき、前記移動車両が駐車行動中か否かを判定する駐車判定手段と、
を有することを特徴とする情報処理装置。
続きを表示(約 940 文字)
【請求項2】
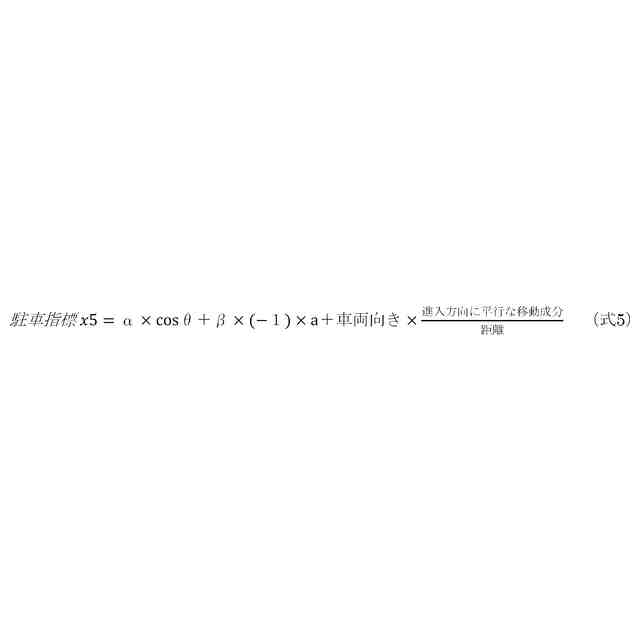
前記駐車枠情報は、前記駐車スペースの位置、前記駐車スペースへの進入の向き、前記駐車スペースで駐車行動中と判定する閾値を含み、
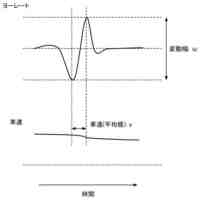
前記車両情報は、前記移動車両の位置、前記移動車両の移動している向き、及び移動速度を含み、
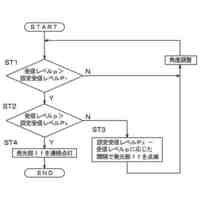
前記駐車判定手段は、前記駐車枠情報及び前記車両情報に基づき、前記移動車両の駐車行動を示す指標値を求め、前記指標値が閾値よりも大きい場合に、前記移動車両が駐車行動中であると判定する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記駐車判定手段による判定結果を周辺設備に通知する通知手段をさらに有する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記周辺設備は、前記判定結果を出力する出力装置、及び前記駐車スペースが設けられた駐車場内を移動する自律移動体の少なくとも一つである、
ことを特徴とする請求項3に記載の情報処理装置。
【請求項5】
前記駐車判定手段による判定結果は、前記自律移動体の進入禁止領域を設定する際に用いられる情報である、
ことを特徴とする請求項4に記載の情報処理装置。
【請求項6】
前記撮影画像は、前記駐車スペース、及び前記駐車スペースに対して進入可能な方向の双方を画角に捉えた画像である、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項7】
駐車スペース及びその周辺を撮影した撮影画像を入力する画像入力工程と、
前記駐車スペースについての駐車枠情報を登録する登録工程と、
前記駐車枠情報を管理する管理工程と、
前記撮影画像から移動車両を認識する移動車両認識工程と、
前記移動車両の車両情報を認識する車両情報認識工程と、
前記駐車枠情報及び前記車両情報に基づき、前記移動車両が駐車行動中か否かを判定する駐車判定工程と、
を有することを特徴とする制御方法。
【請求項8】
請求項1から請求項6のいずれか一項に記載の各手段としてコンピュータを機能させるためのコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、制御方法及びプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、駐車場において駐車スペースが使用されているか否かの判断、いわゆる満空判断に関して監視カメラ画像を用いて実現する仕組みが提案されている。満空判断を行って駐車場内の駐車状況を判断することにより、駐車場入り口に「満車」と表示したり、立体駐車場であれば各階に「満車」又は「空車」を表示したりして、人が運転する車両(手動運転車両)に対する案内を実現している。
【0003】
特許文献1には、複数の駐車スペースを持つ駐車場において、一台のカメラを用いて駐車とその位置を判定する駐車検出装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第6963228号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
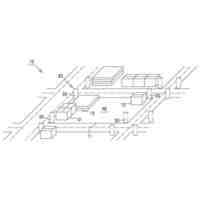
最近では、駐車場内で自走式ロボット等の自律運転車両を走行させて種々のサービスを実現する技術が提案されている。例えば、駐車中の車両に対して自動で充電器のコネクタの挿抜を行う充電ロボットが考えられる。このような充電ロボットは、障害物を回避しながら走行することで駐車場内を自律走行する。この場合、手動運転車両と自律走行を行う充電ロボット(自律運転車両)が同一空間を走行することになる。
【0006】
上記のような状況下では手動運転車両と自律運転車両が同時に同じ駐車スペースに進入してしまう可能性がある。例えば、手動運転車両が駐車しようとしている駐車スペースに対して、充電ロボットが隣接する車両に給電するために進入した場合、充電ロボットが阻害要因となり手動運転車両が進入できなくなる。タイミング的に同時に進入してしまった場合には手動運転のドライバーが心理的負担を感じる恐れがある。
【0007】
また、手動運転車両が駐車位置の案内を受ける場合にあっては、駐車スペースが空いていると案内された場所に行ってみると、すでに他の車両が駐車行動を取っていて駐車できず、無駄足になってしまうことがある。
【0008】
特許文献1に記載の方法では、駐車車両の有無・位置のみを検出しているに過ぎず、移動中の車両の目的位置については予測できない。このため、他車両が駐車しようとしている駐車スペースに、手動運転車両や充電ロボットの案内を行ってしまう場合があった。すなわち従来、駐車スペースへの案内に改善の余地があった。
【0009】
本発明は上記の点に鑑みてなされたものであり、駐車スペースへの案内を改善することを目的とする。
【課題を解決するための手段】
【0010】
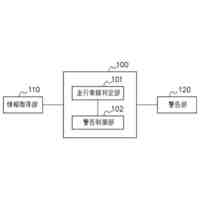
本発明の一実施形態の情報処理装置は、駐車スペース及びその周辺を撮影した撮影画像を入力する画像入力手段と、前記駐車スペースについての駐車枠情報を登録する登録手段と、前記駐車枠情報を管理する管理手段と、前記撮影画像から移動車両を認識する移動車両認識手段と、前記移動車両の車両情報を認識する車両情報認識手段と、前記駐車枠情報及び前記車両情報に基づき、前記移動車両が駐車行動中か否かを判定する駐車判定手段と、を有することを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
防犯装置
1か月前
個人
非常放送システム
2か月前
個人
降車漏れ通報システム
17日前
株式会社ユピテル
システム等
1か月前
スズキ株式会社
車線案内装置
1か月前
スズキ株式会社
運転支援装置
1か月前
スズキ株式会社
運転支援装置
1か月前
ホーチキ株式会社
煙感知器
18日前
株式会社ミヤワキ
測定装置
28日前
上田技研産業株式会社
音発出装置
7日前
ホーチキ株式会社
煙感知器
18日前
トヨタ自動車株式会社
遠隔操作装置
1か月前
トヨタ自動車株式会社
運転診断装置
7日前
中国電力株式会社
安全管理システム
1か月前
ニッタン株式会社
情報発信装置
1か月前
トヨタ自動車株式会社
見守りシステム
7日前
ホーチキ株式会社
感知器ベース
11日前
トヨタ自動車株式会社
制御装置
2か月前
オクト産業株式会社
自動車用安全装置
1か月前
株式会社SUBARU
車両管理システム
11日前
株式会社デンソーウェーブ
監視システム
1か月前
能美防災株式会社
火災感知器
1か月前
株式会社京三製作所
車両検出装置
2か月前
本田技研工業株式会社
地図評価装置
11日前
トヨタ自動車株式会社
映像処理方法
18日前
ホーチキ株式会社
防災盤の筐体構造
28日前
ニッタン株式会社
火災報知システム
28日前
株式会社SUBARU
制限情報更新システム
18日前
株式会社デンソー
報知装置
1か月前
株式会社JVCケンウッド
画像収集システム
13日前
能美防災株式会社
防犯用放水設備
28日前
トヨタ自動車株式会社
運転手推定装置
1か月前
パイオニア株式会社
情報処理装置
1か月前
能美防災株式会社
試験器
1か月前
株式会社JR西日本テクシア
OD記録システム
2か月前
表示灯株式会社
災害警報システム
2か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ