TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024068226
公報種別
公開特許公報(A)
公開日
2024-05-20
出願番号
2022176029
出願日
2022-11-02
発明の名称
搬送システム、垂直搬送機
出願人
鈴木製機株式会社
代理人
個人
,
個人
主分類
B65G
1/04 20060101AFI20240513BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】無人搬送車が長時間稼働することができる搬送システムを提供する。
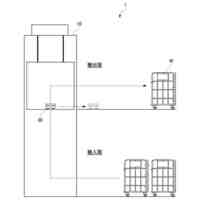
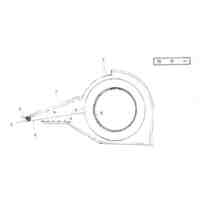
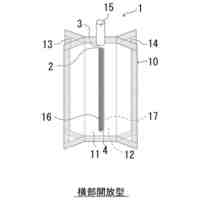
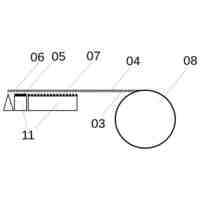
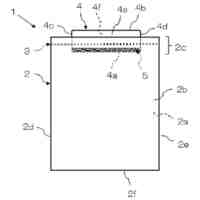
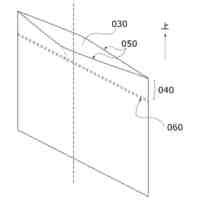
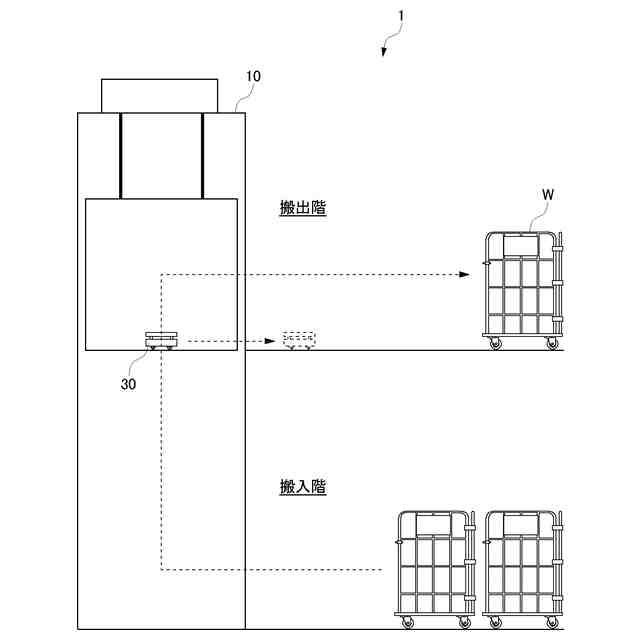
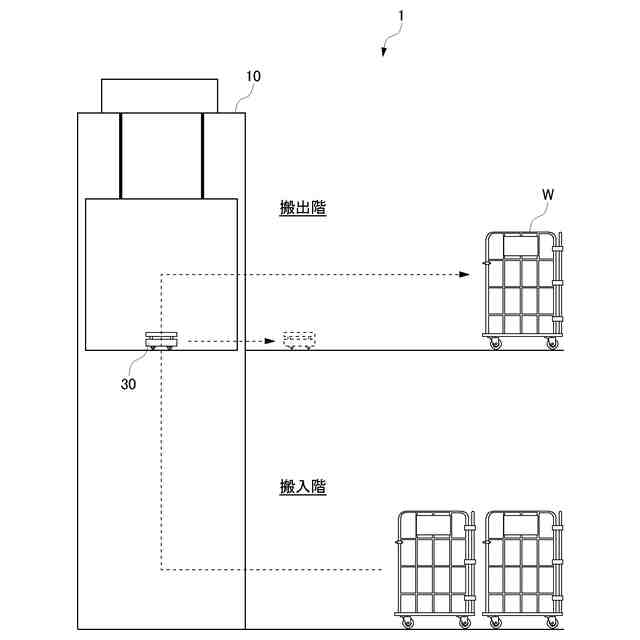
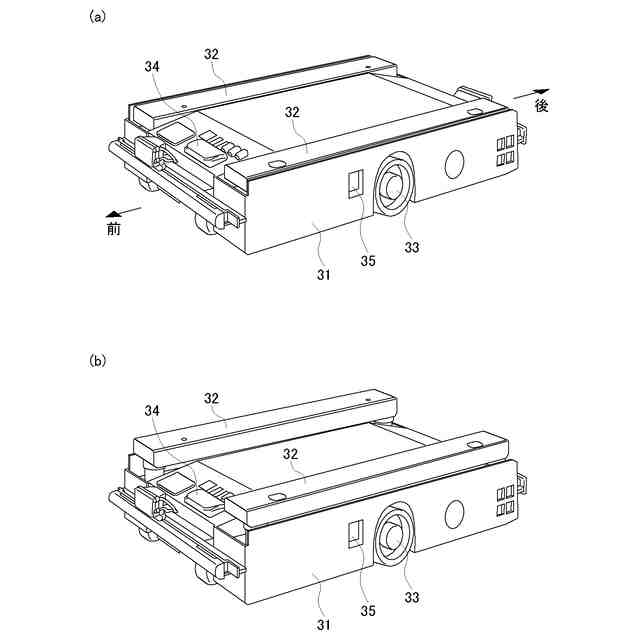
【解決手段】搬送システム1は、垂直方向に延びる枠状のフレーム10と、フレーム10内を昇降可能な搬器と、搬器を昇降させる昇降機構と、を備える垂直搬送機と、垂直搬送機の搬器に乗って各階を跨いでワークを搬送するAGV30とを備える搬送システム1であって、AGV30は、下面に受電ヘッドを備え、垂直搬送機の搬器の床にAGV30に給電するための給電ヘッドを備える。
【選択図】図1
特許請求の範囲
【請求項1】
垂直方向に延びる枠状のフレームと、前記フレーム内を昇降可能な搬器と、前記搬器を昇降させる昇降機構と、を備える垂直搬送機と、
前記垂直搬送機の搬器に乗って各階を跨いでワークを搬送する無人搬送車と、
を備え、
前記無人搬送車は、下面に受電部を備え、
前記垂直搬送機の搬器の床に前記無人搬送車に給電するための給電部を備える搬送システム。
続きを表示(約 1,800 文字)
【請求項2】
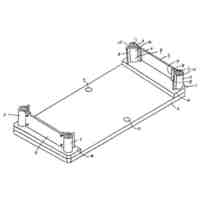
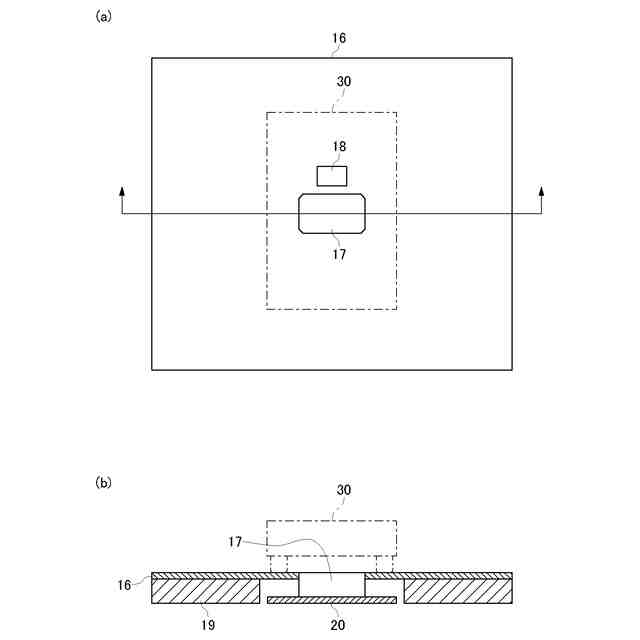
搬器の床は、底板と、前記底板の下に配置され前記搬器内の荷重を支持する支持部材とを備え、
前記支持部材は前記給電部との間に所定の隙間を有するように配置されている請求項1に記載の搬送システム。
【請求項3】
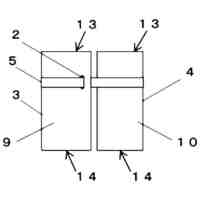
前記給電部は前記床に対して段差なくはめこまれている請求項2に記載の搬送システム。
【請求項4】
前記給電部に隣接して前記床に取り付けられた前記給電部の位置を示すマーカーを備え、
前記無人搬送車は、前記マーカーを検知し、その検知結果に基づいて前記給電部に対して位置合わせを行う請求項1に記載の搬送システム。
【請求項5】
垂直方向に延びる枠状のフレームと、前記フレーム内を昇降可能な搬器と、前記搬器を昇降させる昇降機構と、を備える垂直搬送機と、
前記垂直搬送機の搬器に乗って各階を跨いでワークを搬送する無人搬送車と、
を備え、
前記無人搬送車は、
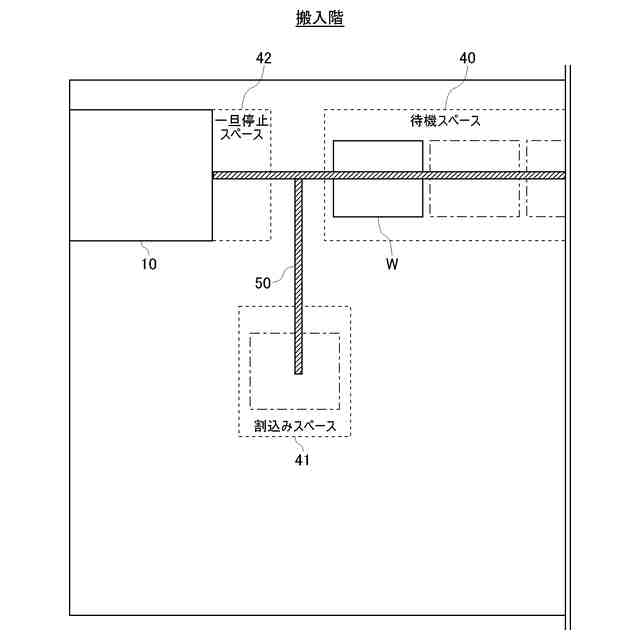
待機スペースにあるワークを検知し、先頭から順番に、ワークを前記垂直搬送機に搬入するとともに、
割込みスペースにあるワークを検知すると、前記待機スペースにあるワークより先に前記割込みスペースにあるワークを前記垂直搬送機に搬入する搬送システム。
【請求項6】
垂直方向に延びる枠状のフレームと、前記フレーム内を昇降可能な搬器と、前記搬器を昇降させる昇降機構と、を備える垂直搬送機と、
前記垂直搬送機に乗って階を跨いでワークを搬送する無人搬送車と、
を備え、
前記垂直搬送機は、前記無人搬送車が出入りする出入口に扉を備え、
前記無人搬送車は、前記垂直搬送機から出たとき、前記扉が閉まるまで前記垂直搬送機の前で停止し、
前記垂直搬送機は、前記無人搬送車が前記垂直搬送機に入るときに前記垂直搬送機の前で停止してから前記扉を開く搬送システム。
【請求項7】
垂直方向に延びる枠状のフレームと、前記フレーム内を昇降可能な搬器と、前記搬器を昇降させる昇降機構と、を備える垂直搬送機と、
前記垂直搬送機の搬器に乗って各階を跨いでワークを搬送する無人搬送車と、
を備え、
前記垂直搬送機の搬器は、ターンテーブルを備える搬送システム。
【請求項8】
垂直方向に延びる枠状のフレームと、前記フレーム内を昇降可能な搬器と、前記搬器を昇降させる昇降機構と、を備える垂直搬送機と、
前記垂直搬送機の搬器に乗って各階を跨いでワークを搬送する無人搬送車と、
を備え、
前記垂直搬送機は、
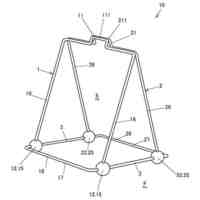
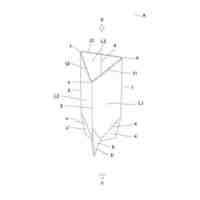
前記搬器に設けられたガイドピンと、
前記フレームの上端に設けられ、前記ガイドピンと係合する受け部と、
を備え、
前記搬器がフレームの上端に到達したときに前記ガイドピンが前記受け部に係合する搬送システム。
【請求項9】
垂直方向に延びる枠状のフレームと、前記フレーム内を昇降可能な搬器と、前記搬器を昇降させる昇降機構と、を備える垂直搬送機と、
前記垂直搬送機の搬器に乗って各階を跨いでワークを搬送する無人搬送車と、
を備え、
前記垂直搬送機は、
前記搬器に設けられたガイドピンと、
前記フレームの下端に設けられ、前記ガイドピンと係合する受け部と、
を備え、
前記搬器がフレームの下端に到達したときに前記ガイドピンが前記受け部に係合する搬送システム。
【請求項10】
垂直方向に延びる枠状のフレームと、前記フレーム内を昇降可能な搬器と、前記搬器を昇降させる昇降機構と、を備える垂直搬送機と、
前記垂直搬送機の搬器に乗って各階を跨いでワークを搬送する無人搬送車と、
を備え、
前記垂直搬送機は、
前記搬器の側面に設けられ、水平方向に移動するガイドピンと、
前記フレームに設けられ、前記ガイドピンと係合する受け部と、
を備え、
前記搬器が所定の階で停止したときに、前記ガイドピンを前記フレーム側に移動させて前記ガイドピンを前記受け部に係合させる搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、垂直搬送機と無人搬送車を組み合わせた搬送システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、自律走行を行う無人搬送車が開発され、物流の倉庫等においても無人搬送車が利用されている。特許文献1は、倉庫において、貨物を積載した台車を牽引して搬送する無人搬送車の自動走行システムを開示している。特許文献1に記載された自動走行システムは、ある棚から別の棚への搬送要求があると、管理サーバが走行ルートを決定し、無人搬送車は管理サーバからの指示にしたがって走行する。
【0003】
特許文献1に記載された自動走行システムは、フロア内における貨物の搬送について記載しているが、複数の階をまたいでの搬送については考慮していない。物流の分野ではないが、工事現場において、自律走行する自動搬送手段を用いて資機材を運ぶ自動搬送システムとして特許文献2がある。特許文献2では、資機材を保持した自律搬送手段を工事用エレベータや工事用リフトに乗せ、目的階へ運ぶことにより、異なる階にある目的地へと資機材を搬送する。
【先行技術文献】
【特許文献】
【0004】
特開2022-45454号公報
特開2020-123079号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
物流の分野においては、多くの貨物(以下「ワーク」ともいう)を効率良く運ぶことが求められており、無人搬送車を常時稼働できることが望ましい。本発明は、上記背景に鑑み、無人搬送車が長時間稼働することができる搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の搬送システムは、垂直方向に延びる枠状のフレームと、前記フレーム内を昇降可能な搬器と、前記搬器を昇降させる昇降機構と、を備える垂直搬送機と、前記垂直搬送機の搬器に乗って各階を跨いでワークを搬送する無人搬送車とを備え、前記無人搬送車は、下面に受電部を備え、前記垂直搬送機の搬器の床に前記無人搬送車に給電するための給電部を備える。この構成により、ワークの搬送中に、搬器内で無人搬送車を充電できるので、無人搬送車の稼働時間を長くすることができる。
【0007】
なお、無人搬送車は、人間が運転操作を行わなくとも自動で走行できる搬送車である。本明細書において、無人搬送車には、磁気テープなどの誘導体によって誘導されるAGV(automatic guides vehicle)も、誘導体なしで自律走行が可能なAMR(autonomous mobile robot)のいずれも含む。
【0008】
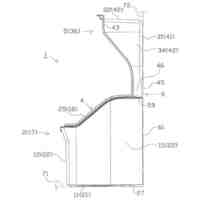
本発明の搬送システムにおいて、搬器の床は、底板と、前記底板の下に配置され前記搬器内の荷重を支持する支持部材とを備え、前記支持部材は前記給電部との間に所定の隙間を有するように配置されていてもよい。支持部材は金属製であるが、支持部材と給電部との間に所定の隙間を設けることにより、充電する際に支持部材の影響を受けないようにできる。これにより、床に対する給電部の高さを低くすることができる。好ましくは、前記給電部は前記床に対して段差なくはめこまれていてもよい。これにより、無人搬送車が搬器内を自由に走行できる。なお、所定の隙間は給電ヘッドの大きさや電池電圧によって異なるが、8mm以上であることが好ましく、さらに好ましくは10mm以上である。
【0009】
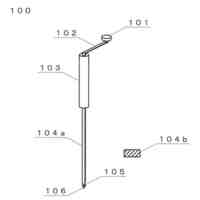
本発明の搬送システムは、前記給電部に隣接して前記床に取り付けられた前記給電部の位置を示すマーカーを備え、前記無人搬送車は、前記マーカーを検知し、その検知結果に基づいて前記給電部に対して位置合わせを行ってもよい。この構成により、無人搬送車の位置合わせを行って、適切に充電を行える。なお、マーカーとしては、RFID、磁気マーカー、カラーセンサ、QRコード(登録商標)等を用いることができる。
【0010】
本発明の他の態様の搬送システムは、垂直方向に延びる枠状のフレームと、前記フレーム内を昇降可能な搬器と、前記搬器を昇降させる昇降機構と、を備える垂直搬送機と、前記垂直搬送機の搬器に乗って各階を跨いでワークを搬送する無人搬送車とを備え、前記無人搬送車は、待機スペースにあるワークを検知し、先頭から順番に、ワークを前記垂直搬送機に搬入するとともに、割込みスペースにあるワークを検知すると、前記待機スペースにあるワークより先に前記割込みスペースにあるワークを前記垂直搬送機に搬入する構成を有する。この構成により、優先して搬送したいワークがある場合にも対応が可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
鈴木製機株式会社
搬送システム、垂直搬送機
4か月前
個人
構造体
6か月前
個人
収納用具
3か月前
個人
物品収納具
3か月前
個人
半蓋半箱筒
8か月前
個人
折り畳み製品
10か月前
個人
開封用カッター
5か月前
個人
掃除楽々ゴミ箱
4か月前
個人
テープホルダー
10か月前
個人
段ボール用キリ
11か月前
個人
「即時結束具」
10か月前
個人
爪楊枝流通セット
9か月前
個人
パウチ容器
6か月前
個人
粘着テープカッタ
10か月前
個人
チャック付き袋体
5か月前
個人
コード長さ調整器
10か月前
個人
折りたたみコップ
5か月前
個人
開口しやすいレジ袋
7か月前
株式会社イシダ
包装装置
8か月前
三甲株式会社
容器
10か月前
個人
チャック付き保存袋
5か月前
個人
プラスチックバッグ
7か月前
個人
伸縮するゴミ収納器
6か月前
個人
粘着テープ剥がし具
16日前
三甲株式会社
容器
10か月前
個人
粘着テープ切断装置
1か月前
三甲株式会社
容器
1か月前
三甲株式会社
容器
8か月前
個人
粘着テープ剥がし具
4か月前
株式会社イシダ
箱詰装置
1か月前
三甲株式会社
容器
8か月前
積水樹脂株式会社
接着剤
4か月前
三甲株式会社
容器
2か月前
三甲株式会社
容器
8か月前
個人
穿孔紐通し結束器具
7か月前
三甲株式会社
容器
11か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ