TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024067734
公報種別
公開特許公報(A)
公開日
2024-05-17
出願番号
2022178042
出願日
2022-11-07
発明の名称
ポカヨケ装置、及びプログラム
出願人
株式会社ミツトヨ
代理人
弁理士法人創光国際特許事務所
,
個人
,
個人
,
個人
主分類
G05B
19/18 20060101AFI20240510BHJP(制御;調整)
要約
【課題】対象物が所望の状態で適切に位置しているか否かを作業者等が容易に把握できるようにする。
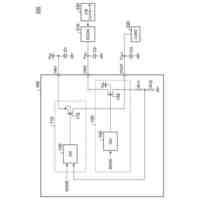
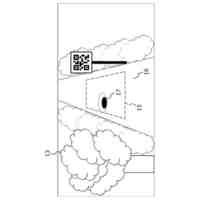
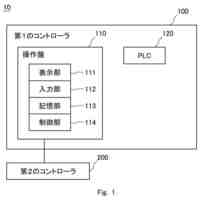
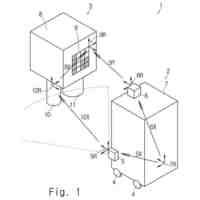
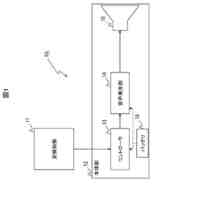
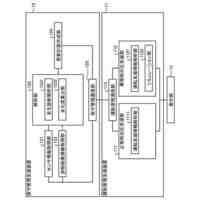
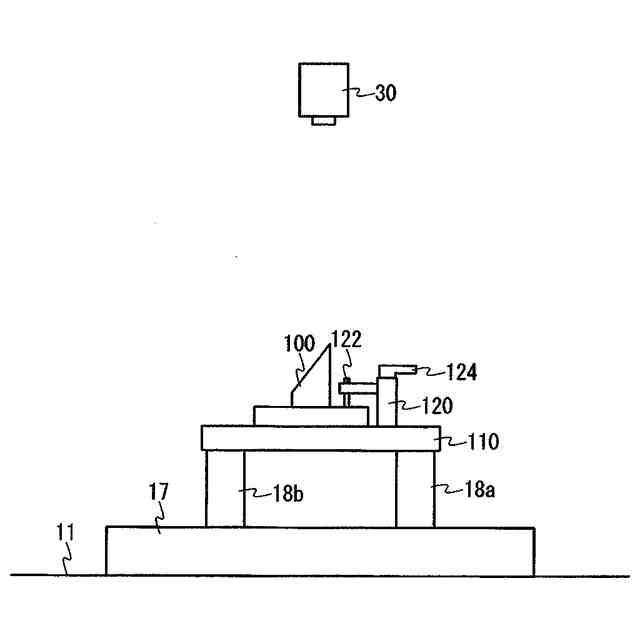
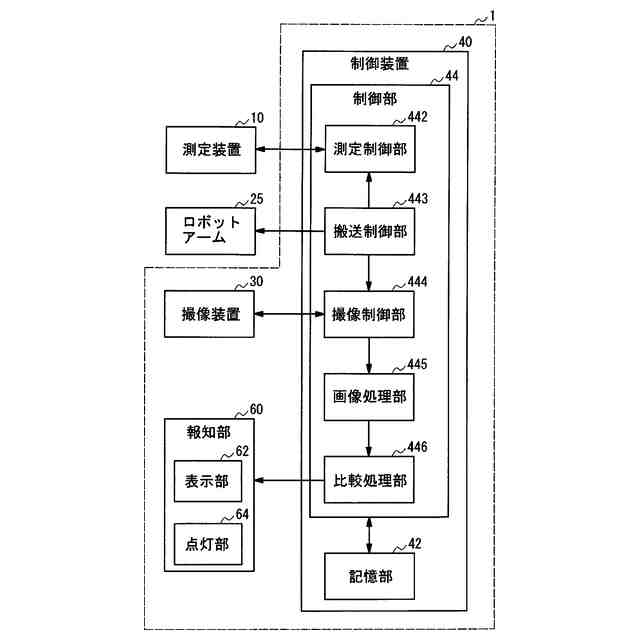
【解決手段】製造工程に設けられるポカヨケ装置1は、識別可能な複数のマークが設けられた対象物を撮像する撮像装置30と、撮像装置30が撮像した少なくとも一つの撮像画像から、各マークの座標位置を含む状態データを求める画像処理部445と、画像処理部445によって求められ、各マークの基準位置を含む基準データを記憶している記憶部42と、記憶部42に記憶されている基準データと、画像処理部445が求めた現在の状態データとを比較し、複数のマークの少なくとも一部に関する比較結果を出力する比較処理部446を備える。
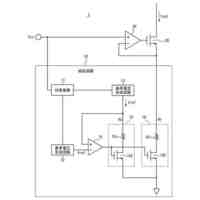
【選択図】図3
特許請求の範囲
【請求項1】
製造工程に設けられるポカヨケ装置であって、
識別可能な複数のマークが設けられた対象物を撮像する撮像部と、
前記撮像部が撮像した少なくとも一つの撮像画像から、各マークの座標位置を含む状態データを求める画像処理部と、
前記画像処理部によって求められ、各マークの基準位置を含む基準データを記憶している記憶部と、
前記記憶部に記憶されている前記基準データと、前記画像処理部が求めた現在の前記状態データとを比較し、前記複数のマークの少なくとも一部に関する比較結果を出力する比較処理部と、
を備える、ポカヨケ装置。
続きを表示(約 1,200 文字)
【請求項2】
前記記憶部は、前記対象物が載置される載置面に設けられた複数の基準データを撮像して設定された基準座標系を記憶し、
前記画像処理部は、前記基準座標系での各マークの座標位置を含む状態データを求める、
請求項1に記載のポカヨケ装置。
【請求項3】
前記対象物は、主面に複数の第1マークが設けられたベース部を含み、
前記画像処理部は、前記第1マークを含む前記撮像画像から、前記第1マークの前記状態データを求める、
請求項1に記載のポカヨケ装置。
【請求項4】
前記対象物は、前記ベース部に対して移動可能に設けられ、複数の第2マークが設けられた可動部を含み、
前記画像処理部は、前記第2マークを含む前記撮像画像から、前記第2マークの前記状態データを求める、
請求項2に記載のポカヨケ装置。
【請求項5】
前記画像処理部は、マーク間の距離と、複数のマークが所定方向と成す角度との少なくともいずれか一方を更に含む前記状態データを求める、
請求項2に記載のポカヨケ装置。
【請求項6】
前記撮像部は、測定装置の載置面上に載置された前記対象物を撮像し、
前記比較処理部は、前記基準データと前記状態データを比較し、前記対象物の前記載置面上での載置状態を報知部に報知させる、
請求項1に記載のポカヨケ装置。
【請求項7】
前記比較処理部は、前記状態データが示す座標位置の前記基準データが示す基準位置に対する乖離度合いが所定値を超えるか否かを判定して、前記報知部としての表示部に判定結果を表示させる、
請求項6に記載のポカヨケ装置。
【請求項8】
前記比較処理部は、前記対象物が前記載置面上の所定位置に所定態様で位置していることを示す第1報知、又は前記対象物が前記所定態様では位置していないことを示す第2報知を報知させる、
請求項6に記載のポカヨケ装置。
【請求項9】
前記撮像部は、待機位置にセットされた複数の前記対象物の中の一の対象物が、搬送装置によって移動されて前記測定装置の前記載置面上に載置された際に、前記一の対象物の前記マークを撮像する、
請求項6に記載のポカヨケ装置。
【請求項10】
プロセッサに、
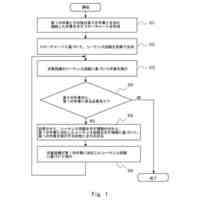
識別可能な複数のマークが設けられた対象物を撮像部に撮像させるステップと、
前記撮像部が撮像した少なくとも一つの撮像画像から、各マークの座標位置を含む状態データを求めるステップと、
記憶部に記憶された各マークの基準位置を含む基準データと、求めた現在の前記状態データとを比較し、前記複数のマークの少なくとも一部に関する比較結果を出力するステップと、
を実行させるための、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ポカヨケ装置、及びプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
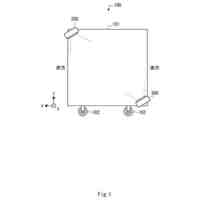
製造工程において、ワーク(対象物)を測定装置で測定する際には、ロボットアームによってワークを測定装置の所定位置に搬送して、プローブ等によって当該ワークの測定を行う。ワークは、予めベース部にクランプによって固定されており、ロボットアームがベース部を支持してワークを搬送する。
【先行技術文献】
【特許文献】
【0003】
特開2019-100904号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来では、作業者が、工程中のワークの状態やワークを固定する固定治具の状態を目視で確認している。このため、ワークや固定治具の状態が所望状態からずれていても、作業者が見落としてしまうおそれがあり、この場合には、ワークの測定や加工等が適切に行われない。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、対象物が所望の状態で適切に位置しているか否かを作業者等が容易に把握できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様においては、製造工程に設けられるポカヨケ装置であって、識別可能な複数のマークが設けられた対象物を撮像する撮像部と、前記撮像部が撮像した少なくとも一つの撮像画像から、各マークの座標位置を含む状態データを求める画像処理部と、前記画像処理部によって求められ、各マークの基準位置を含む基準データを記憶している記憶部と、前記記憶部に記憶されている前記基準データと、前記画像処理部が求めた現在の前記状態データとを比較し、前記複数のマークの少なくとも一部に関する比較結果を出力する比較処理部と、を備える、ポカヨケ装置を提供する。
【0007】
また、前記記憶部は、前記対象物が載置される載置面に設けられた複数の基準データを撮像して設定された基準座標系を記憶し、前記画像処理部は、前記基準座標系での各マークの座標位置を含む状態データを求めることとしてもよい。
【0008】
また、前記対象物は、主面に複数の第1マークが設けられたベース部を含み、前記画像処理部は、前記第1マークを含む前記撮像画像から、前記第1マークの前記状態データを求めることとしてもよい。
【0009】
また、前記対象物は、前記ベース部に対して移動可能に設けられ、複数の第2マークが設けられた可動部を含み、前記画像処理部は、前記第2マークを含む前記撮像画像から、前記第2マークの前記状態データを求めることとしてもよい。
【0010】
また、前記画像処理部は、マーク間の距離と、複数のマークが所定方向と成す角度との少なくともいずれか一方を更に含む前記状態データを求めることとしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ミツトヨ
計測装置及び計測方法
9日前
株式会社ミツトヨ
三次元測定機およびインライン測定システム
9日前
井関農機株式会社
作業車両
2か月前
株式会社FUJI
工作機械
1か月前
株式会社豊田自動織機
自動走行体
9日前
エイブリック株式会社
定電圧回路
2か月前
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
トヨタ自動車株式会社
移動システム
2か月前
日昌電気制御株式会社
管理システム
2か月前
井関農機株式会社
自立走行農作業車
2か月前
トヨタ自動車株式会社
制御システム
1か月前
トヨタ自動車株式会社
設備の制御方法
2か月前
株式会社ユタカ
半自動切換装置
2か月前
トヨタ自動車株式会社
マーカースタンド
1か月前
株式会社ダイフク
搬送設備
1か月前
井関農機株式会社
作業車両の作業管理システム
2か月前
横河電機株式会社
電流源回路
2か月前
株式会社豊田自動織機
自律走行車両
2か月前
株式会社デンソー
電子制御装置
8日前
株式会社フカデン
外周部加工システム
19日前
住友重機械工業株式会社
自律走行台車
2か月前
個人
ペダル操作検知装置
2か月前
株式会社デンソー
移動体制御装置
16日前
三菱電機株式会社
管理システムおよび管理方法
2か月前
大阪瓦斯株式会社
二次圧制御機構
26日前
大阪瓦斯株式会社
二次圧制御機構
26日前
ミツミ電機株式会社
半導体集積回路装置
1か月前
日立建機株式会社
自律走行システム
23日前
アズビル株式会社
パラメータ探索装置および方法
2か月前
横河電機株式会社
電圧電流変換回路
1か月前
株式会社デンソー
車両用電子制御装置
1か月前
ニチコン株式会社
電源装置
2か月前
トヨタ自動車株式会社
充電装置
2か月前
株式会社ダイフク
搬送設備の検査装置
26日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ