TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024063331
公報種別
公開特許公報(A)
公開日
2024-05-13
出願番号
2022171176
出願日
2022-10-26
発明の名称
動作解析装置
出願人
住友ゴム工業株式会社
,
学校法人立命館
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G06V
10/82 20220101AFI20240502BHJP(計算;計数)
要約
【課題】 物体の動作を定量的に表す動作値を、高い精度で導出することが可能な動作解析装置などを提供する。
【解決手段】 物体の動作を解析するための動作解析装置などである。この動作解析装置は、物体の動作が距離画像センサによって撮影された複数の深度画像21を取得する取得部と、物体の動作を定量的に表す動作値を出力可能なニューラルネットワーク31に、複数の深度画像21を入力して、動作値を導出する導出部とを備える。
【選択図】図7
特許請求の範囲
【請求項1】
物体の動作を解析するための動作解析装置であって、
前記物体の動作が距離画像センサによって撮影された複数の深度画像を取得する取得部と、
前記物体の動作を定量的に表す動作値を出力可能なニューラルネットワークに、前記複数の深度画像を入力して、前記動作値を導出する導出部とを備える、
動作解析装置。
続きを表示(約 890 文字)
【請求項2】
前記物体は、ゴルフクラブを把持したゴルファである、請求項1に記載の動作解析装置。
【請求項3】
前記動作は、ゴルフスイングである、請求項2に記載の動作解析装置。
【請求項4】
前記取得部は、前記物体の動作が時系列で連続的に撮影された前記深度画像を取得する、請求項1又は2に記載の動作解析装置。
【請求項5】
前記導出部は、前記時系列で連続的に撮影された少なくとも3枚の深度画像のセットを入力する、請求項4に記載の動作解析装置。
【請求項6】
前記導出部は、前記セットのうち、前記時系列の両端に位置する深度画像を除いた1枚の深度画像の前記動作値を導出する、請求項5に記載の動作解析装置。
【請求項7】
前記物体は、人体であり、
前記動作値は、前記人体の関節の位置データを含む、請求項1又は2に記載の動作解析装置。
【請求項8】
前記ニューラルネットワークを学習させる学習部をさらに備え、
前記学習部は、前記物体の動作をコンピュータグラフィックスで再現した複数の第1画像と、前記複数の第1画像のそれぞれの動作値とを含む教師データに基づいて、前記ニューラルネットワークを学習させる、請求項1又は2に記載の動作解析装置。
【請求項9】
前記複数の第1画像は、前記物体の動作を時系列で連続的に再現したものであり、
前記教師データは、前記複数の第1画像について、時間軸の前後で隣接する第1画像の時間間隔を互いに異ならせた複数の第1画像のセットを含む、請求項8に記載の動作解析装置。
【請求項10】
物体の動作を解析するための学習モデルの生成方法であって、
前記物体の動作をコンピュータグラフィックスで再現した複数の第1画像と、前記複数の第1画像のそれぞれの動作値とを含む教師データに基づいて、ニューラルネットワークを学習させる、
学習モデルの生成方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、動作解析装置などに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
下記特許文献1には、動作解析装置が記載されている。この装置は、物体の動作を距離画像センサにより撮影した深度画像を取得する取得部と、物体の動作を定量的に表す動作値を出力とするニューラルネットワークに、取得部により取得された深度画像を入力することにより、動作値を導出する導出部とを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2018-026131号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、物体の動作を撮影した深度画像から、その物体の動作値を導出するにあたり、導出精度のさらなる向上が求められている。
【0005】
本発明は、以上のような実状に鑑み案出されたもので、物体の動作を定量的に表す動作値を、高い精度で導出することが可能な動作解析装置を提供することを主たる目的としている。
【課題を解決するための手段】
【0006】
本発明は、物体の動作を解析するための動作解析装置であって、前記物体の動作が距離画像センサによって撮影された複数の深度画像を取得する取得部と、前記物体の動作を定量的に表す動作値を出力可能なニューラルネットワークに、前記複数の深度画像を入力して、前記動作値を導出する導出部とを備える、動作解析装置である。
【発明の効果】
【0007】
本発明の動作解析装置は、上記の構成を採用することにより、物体の動作を定量的に表す動作値を、高い精度で導出することが可能となる。
【図面の簡単な説明】
【0008】
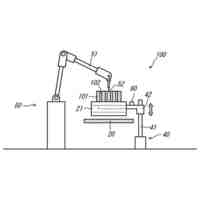
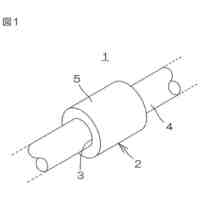
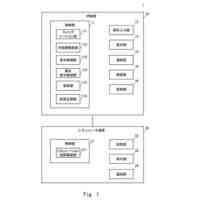
本実施形態の動作解析装置を含む動作解析システムを概念的に示す構成図である。
本実施形態の動作解析装置を示すブロック図である。
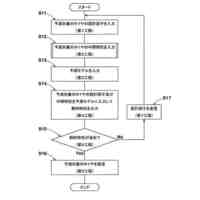
本実施形態の動作解析方法の処理手順を示すフローチャートである。
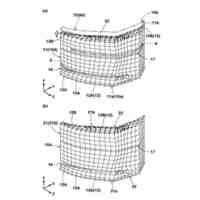
複数の深度画像を含む深度画像群を示す図である。
(a)は正規化される前の深度画像を示す図、(b)は正規化された深度画像を示す図である。
人体の関節の位置データを説明する図である。
学習モデル(ニューラルネットワーク)を示す図である。
導出された動作値を示す図である。
左手の位置データと時間との関係を示すグラフである。(a)は、奥行方向(X軸方向)の位置データ、(b)は、飛球線方向(Y軸方向)の位置データ、及び、(c)は、高さ方向(Z軸方向)の位置データを示している。
物体の動作が時系列で連続的に再現された複数の第1画像を含むセットを示す図である。
本実施形態の学習モデルの生成方法の処理手順の一例を示すフローチャートである。
1つの位置データ群(ボーンデータ群)を示す図である。
物体モデルを示す図である。
複数の第1画像41が第2時間間隔で取得された第1画像群を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態が図面に基づき説明される。図面は、発明の内容の理解を助けるために、誇張表現や、実際の構造の寸法比とは異なる表現が含まれることが理解されなければならない。また、各実施形態を通して、同一又は共通する要素については同一の符号が付されており、重複する説明が省略される。さらに、実施形態及び図面に表された具体的な構成は、本発明の内容理解のためのものであって、本発明は、図示されている具体的な構成に限定されるものではない。
【0010】
[動作解析システム]
本実施形態の動作解析装置(動作解析システム)は、物体の動作の解析に用いられる。図1は、本実施形態の動作解析装置2を含む動作解析システム1を概念的に示す構成図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
住友ゴム工業株式会社
タイヤ
13日前
住友ゴム工業株式会社
タイヤ
3日前
住友ゴム工業株式会社
タイヤ
5日前
住友ゴム工業株式会社
タイヤ
5日前
住友ゴム工業株式会社
タイヤ
19日前
住友ゴム工業株式会社
ゴルフボール
11日前
住友ゴム工業株式会社
ゴルフボール
11日前
住友ゴム工業株式会社
キャディバッグ
19日前
住友ゴム工業株式会社
自動二輪車用タイヤ
3日前
住友ゴム工業株式会社
自動二輪車用タイヤ
3日前
住友ゴム工業株式会社
タイヤモデルの作成方法
5日前
住友ゴム工業株式会社
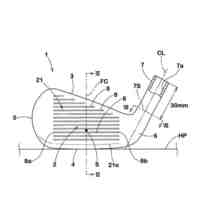
アイアン型ゴルフクラブヘッド
13日前
住友ゴム工業株式会社
タイヤ用ゴム組成物及びタイヤ
20日前
住友ゴム工業株式会社
ベントホール洗浄診断システム
11日前
住友ゴム工業株式会社
タイヤ用モールド及びタイヤの製造方法
18日前
住友ゴム工業株式会社
空気入りタイヤの製造方法及び加硫金型
10日前
住友ゴム工業株式会社
トレッド成形用金型及びトレッド成形用金型の製造方法
10日前
住友ゴム工業株式会社
紙送りローラ
3日前
住友ゴム工業株式会社
タイヤの静的特性の予測方法、予測装置及び予測モデルの作成方法
13日前
住友ゴム工業株式会社
ゴム組成物およびタイヤ
12日前
個人
非正規コート
13日前
個人
人物再現システム
10日前
個人
AI飲食最適化プラグイン
3日前
有限会社ノア
データ読取装置
11日前
個人
電話管理システム及び管理方法
4日前
株式会社ザメディア
出席管理システム
18日前
個人
広告提供システムおよびその方法
13日前
個人
日誌作成支援システム
10日前
ミサワホーム株式会社
情報処理装置
17日前
トヨタ自動車株式会社
工程計画装置
18日前
株式会社タクテック
商品取出集品システム
17日前
トヨタ自動車株式会社
作業判定方法
19日前
個人
ポイント還元付き配送システム
11日前
オベック実業株式会社
接続構造
10日前
トヨタ自動車株式会社
情報処理システム
19日前
ゼネラル株式会社
RFIDタグ付き物品
20日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ