TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058735
公報種別
公開特許公報(A)
公開日
2024-04-30
出願番号
2022166012
出願日
2022-10-17
発明の名称
搬送システム、搬送方法、およびプログラム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B65G
1/00 20060101AFI20240422BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】棚に収容される物品が落下することを防止できる搬送システム、搬送方法、およびプログラムを実現する。
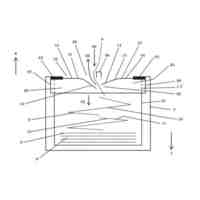
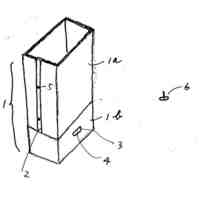
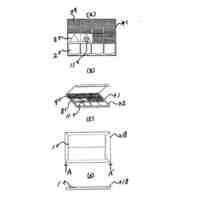
【解決手段】本開示の一形態に係る搬送システム1は、鉛直方向に延びるガイドレール113が設けられた棚11と、ガイドレール113に係合可能な載置台121と、載置台121を昇降させる昇降部123と、ガイドレール113と載置台121との係合を検出する係合検出センサ125と、ガイドレール113と載置台121とが係合していないことを含む第1条件が満たされた場合、昇降部123の動作を停止させる安全制御部127とを備える。
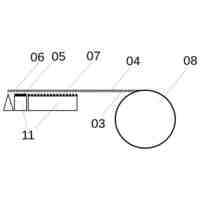
【選択図】図1
特許請求の範囲
【請求項1】
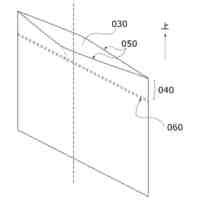
鉛直方向に延びるガイドレールが設けられた棚と、
前記ガイドレールに係合可能な載置台と、
前記載置台を昇降させる昇降部と、
前記ガイドレールと前記載置台との係合を検出する係合検出センサと、
前記ガイドレールと前記載置台とが係合していないことを含む第1条件が満たされた場合、前記昇降部の動作を停止させる安全制御部と
を備える搬送システム。
続きを表示(約 1,300 文字)
【請求項2】
前記搬送システムは、前記載置台の高さを検出する高さ検出センサを備え、
前記第1条件は、前記載置台の高さが、前記ガイドレールの下端よりも高い所定の高さ以上であることを含む
請求項1に記載の搬送システム。
【請求項3】
前記載置台には、前記ガイドレールと係合する溝が設けられ、
前記係合検出センサは、前記溝に設けられる
請求項1または2のいずれかに記載の搬送システム。
【請求項4】
前記載置台には、水平方向に伸縮する伸縮アームが設けられ、
前記安全制御部は、前記第1条件が満たされた場合、前記伸縮アームの動作を停止させる
請求項1または2のいずれかに記載の搬送システム。
【請求項5】
前記昇降部は、移動可能な移動部上に設けられ、
前記安全制御部は、前記ガイドレールと前記載置台とが係合していることを含む第2条件が満たされた場合、前記移動部の動作を停止させる
請求項2に記載の搬送システム。
【請求項6】
前記昇降部への駆動源の供給を遮断する第1遮断部と、
前記移動部への駆動源の供給を遮断する第2遮断部と
を備え、
前記安全制御部は、前記昇降部の動作を停止させる場合、前記第1遮断部を遮断状態とし、前記移動部の動作を停止させる場合、前記第2遮断部を遮断状態とする
請求項5に記載の搬送システム。
【請求項7】
前記載置台には、水平方向に伸縮する伸縮アームが設けられ、
前記第1遮断部は、前記伸縮アームへの駆動源の供給をさらに遮断する
請求項6に記載の搬送システム。
【請求項8】
前記載置台には、水平方向に伸縮する伸縮アームが設けられ、
前記搬送システムは、前記伸縮アームへの駆動源の供給を遮断する第3遮断部を備え、
前記安全制御部は、前記ガイドレールと前記載置台が係合しておらず、かつ、前記載置台の高さが、前記所定の高さとは異なる高さ以上である場合、前記第3遮断部を遮断状態にする
請求項6に記載の搬送システム。
【請求項9】
前記搬送システムは、
前記移動部による移動を検出する移動検出センサと、
前記移動部および前記昇降部への駆動源の供給を遮断する第4遮断部と
を備え、
前記安全制御部は、前記第1条件が満たされる場合、および前記第2条件が満たされる場合、前記第4遮断部を遮断状態にし、
前記第2条件は、前記載置台の高さが前記所定の高さ以上であること、および前記移動部が移動していることを含む
請求項5に記載の搬送システム。
【請求項10】
前記載置台には、水平方向に伸縮する伸縮アームが設けられ、
前記第4遮断部は、前記伸縮アームへの駆動源の供給をさらに遮断する
請求項9に記載の搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送システム、搬送方法、およびプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、物品を台車に載置して搬送する搬送ロボットを開示している。
【先行技術文献】
【特許文献】
【0003】
特許第6413899号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
台車に載置された物品を棚に格納する手段や、棚に収容された物品を台車に載置する手段として、棚にガイドレールを設け、載置台をガイドレールに沿って上昇させることが考えられる。このケースでは、ガイドレールと係合していない状態の載置台を上昇させた場合、物品を落下させてしまう恐れがあるという問題があった。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、棚に収容される物品が落下することを防止できる搬送システム、搬送方法、およびプログラムを実現する。
【課題を解決するための手段】
【0006】
本開示の一態様の搬送システムは、
鉛直方向に延びるガイドレールが設けられた棚と、
前記ガイドレールに係合可能な載置台と、
前記載置台を昇降させる昇降部と、
前記ガイドレールと前記載置台との係合を検出する係合検出センサと、
前記ガイドレールと前記載置台とが係合していないことを含む第1条件が満たされた場合、前記昇降部の動作を停止させる安全制御部と
を備える。
【0007】
本開示の一態様の搬送方法は、
棚に設けられた鉛直方向に延びるガイドレールと、前記ガイドレールに係合可能な載置台との係合を検出し、
前記ガイドレールと前記載置台とが係合していないことを含む第1条件が満たされた場合、前記載置台を昇降させる昇降部の動作を停止させる。
【0008】
本開示の一態様のプログラムは、
コンピュータに、
棚に設けられた鉛直方向に延びるガイドレールと、前記ガイドレールに係合可能な載置台との係合を検出するセンサの検出結果を取得する処理と、
前記ガイドレールと前記載置台とが係合していないことを含む第1条件が満たされた場合、前記載置台を昇降させる昇降部の動作を停止させる処理とを実行させる。
【発明の効果】
【0009】
本開示によれば、棚に収容される物品が落下することを防止できる搬送システム、搬送方法、およびプログラムを実現することができる。
【図面の簡単な説明】
【0010】
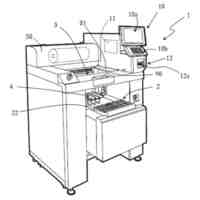
実施形態1にかかる搬送システムの構成を説明する図である。
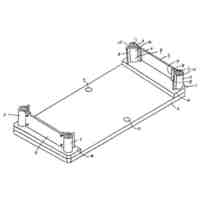
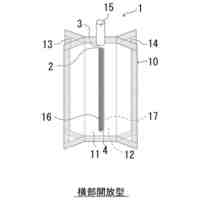
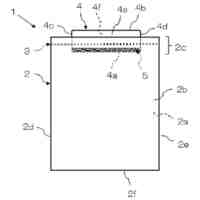
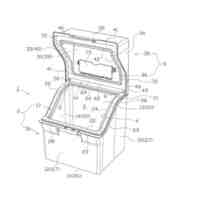
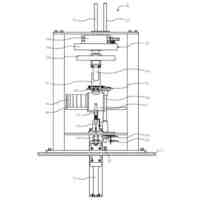
実施形態1にかかる棚の正面図である。
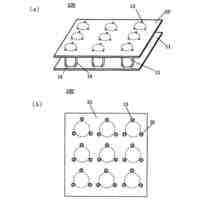
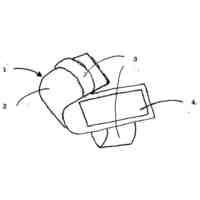
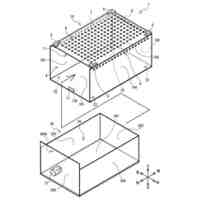
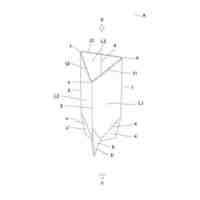
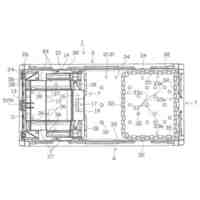
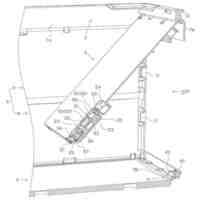
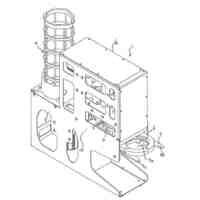
実施形態1にかかる搬送ロボットの斜視図である。
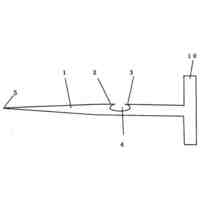
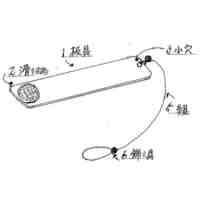
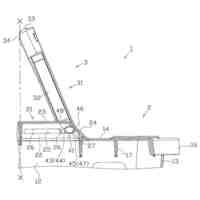
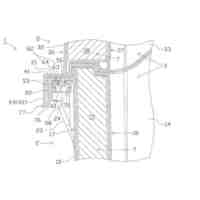
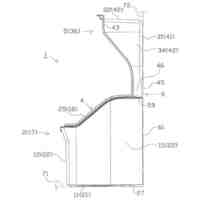
実施形態1にかかる搬送ロボットの側面図である。
実施形態1にかかる搬送ロボットの機能を示すブロック図である。
実施形態2にかかる搬送ロボットの側面図である。
実施形態2にかかる搬送ロボットの機能を示すブロック図である。
実施形態2にかかる搬送ロボットの動作を説明する図である。
実施形態2にかかる搬送ロボットの動作を説明する図である。
実施形態2にかかる安全制御部の動作を説明する図である。
実施形態3にかかる搬送ロボットの機能を示すブロック図である。
実施形態3にかかる安全制御部の動作を説明する図である。
変形例にかかる搬送ロボットの側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
包装体
8か月前
個人
包装体
8か月前
個人
構造体
2か月前
個人
パレット
8か月前
個人
半蓋半箱筒
4か月前
個人
衣類カバー
8か月前
個人
折り畳み製品
6か月前
個人
荷物運搬補助具
9か月前
個人
内容物排出装置
8か月前
個人
開封用カッター
1か月前
個人
掃除楽々ゴミ箱
4日前
個人
「即時結束具」
6か月前
個人
テープホルダー
6か月前
個人
段ボール用キリ
7か月前
個人
粘着テープカッタ
6か月前
個人
パウチ容器
2か月前
個人
コード長さ調整器
6か月前
個人
収容ケース
8か月前
個人
ビニール袋開口具
8か月前
個人
爪楊枝流通セット
5か月前
個人
折りたたみコップ
1か月前
個人
チャック付き袋体
1か月前
三甲株式会社
容器
5か月前
三甲株式会社
容器
4か月前
三甲株式会社
容器
6か月前
三甲株式会社
容器
8か月前
三甲株式会社
容器
6か月前
個人
プラスチックバッグ
3か月前
三甲株式会社
容器
4か月前
三甲株式会社
容器
4か月前
株式会社KY7
封止装置
5か月前
個人
粘着テープ剥がし具
10日前
個人
チャック付き保存袋
1か月前
日東精工株式会社
包装機
8か月前
個人
開口しやすいレジ袋
3か月前
株式会社イシダ
包装装置
4か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ