TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024055616
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022162694
出願日
2022-10-07
発明の名称
基板搬送用ロボットシステム、および、基板搬送用ロボットによる基板の置き位置および取り位置の少なくともいずれかの補正方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20240411BHJP(基本的電気素子)
要約
【課題】水平面内における基板の置き位置を補正するための時間を短縮することが可能な基板搬送用ロボットシステムを提供する。
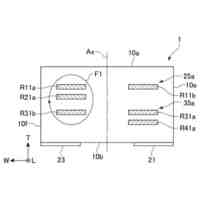
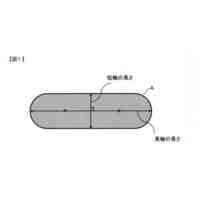
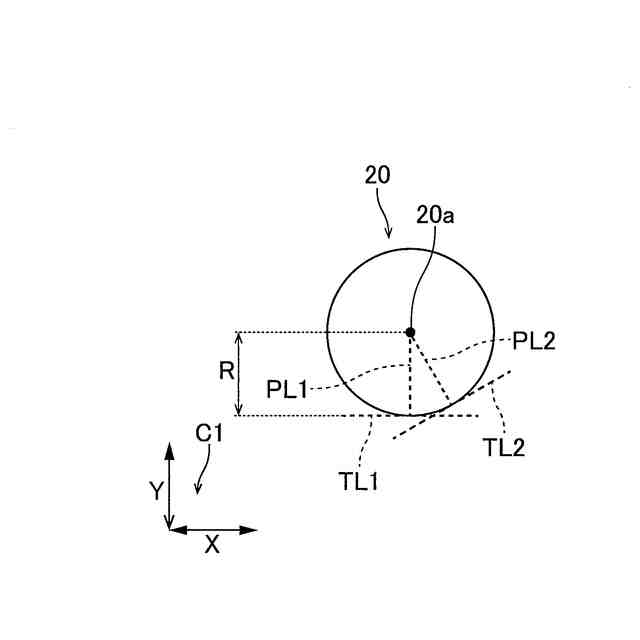
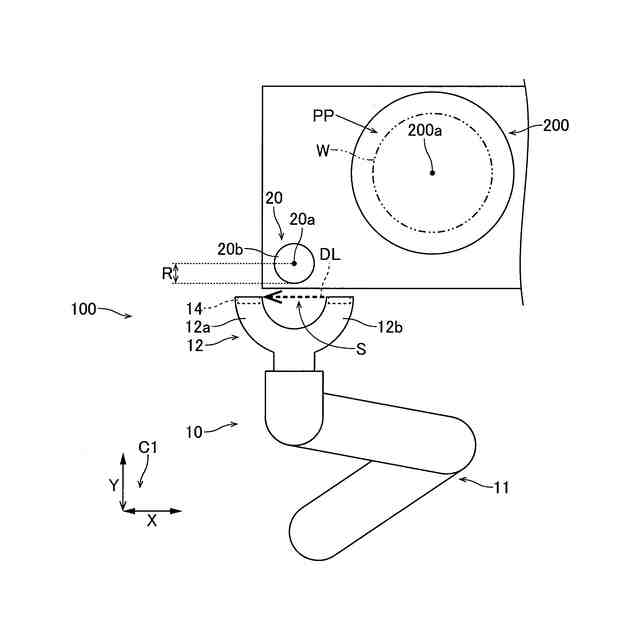
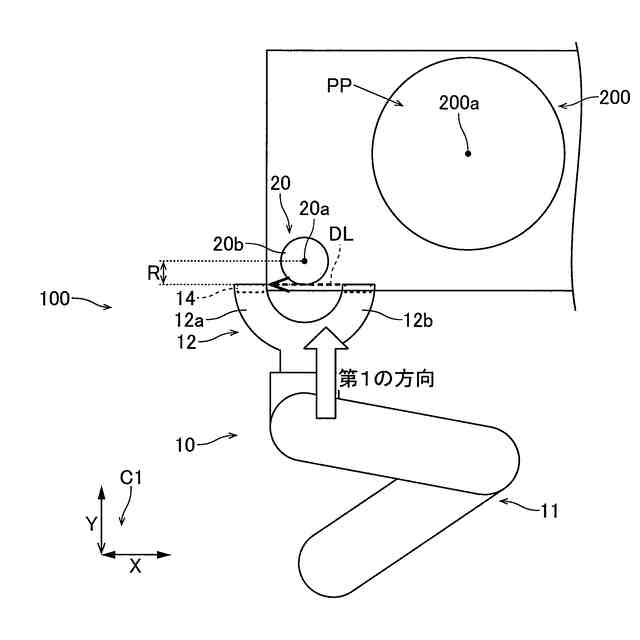
【解決手段】この基板搬送用ロボットシステム100では、制御部13は、ハンド12をターゲット部材20に対して水平面内の第1の方向から接近させて検出部14を用いて取得したターゲット部材20の外周縁部20bに対応する第1の接線TL1と、ハンド12をターゲット部材20に対して第1の方向とは異なる水平面内の第2の方向から接近させて検出部14を用いて取得したターゲット部材20の外周縁部20bに対応する第2の接線TL2とに基づいて、水平面内におけるターゲット部材20の中心位置20aを取得する。
【選択図】図5
特許請求の範囲
【請求項1】
基板を搬送する基板搬送用ロボットと、
上下方向から見て円形形状を有し、水平面内における前記基板の置き位置および取り位置の少なくともいずれかの補正のための水平用ターゲット部材と、
制御部と、を備え、
前記基板搬送用ロボットは、
ロボットアームと、
前記ロボットアームの先端に取り付けられたハンドと、
前記ハンドに配置され、前記水平用ターゲット部材の外周縁部を検出する検出部と、を備え、
前記制御部は、
前記ハンドを前記水平用ターゲット部材に対して水平面内の第1の方向から接近させて前記検出部を用いて取得した前記水平用ターゲット部材の前記外周縁部に対応する第1の接線と、前記ハンドを前記水平用ターゲット部材に対して前記第1の方向とは異なる水平面内の第2の方向から接近させて前記検出部を用いて取得した前記水平用ターゲット部材の前記外周縁部に対応する第2の接線とに基づいて、水平面内における前記水平用ターゲット部材の中心位置を取得するとともに、
取得された水平面内における前記水平用ターゲット部材の前記中心位置と、予め取得されている、前記水平用ターゲット部材の前記中心位置と前記基板の置き場との間の水平面内における相対的な位置関係とに基づいて、水平面内における前記基板の前記置き位置および前記取り位置の少なくともいずれかの補正を行う、基板搬送用ロボットシステム。
続きを表示(約 1,800 文字)
【請求項2】
上下方向における前記基板の前記置き位置および前記取り位置の少なくともいずれかの補正のための上下用ターゲット部材をさらに備え、
前記検出部は、前記上下用ターゲット部材の位置を検出し、
前記制御部は、
前記ハンドを前記上下用ターゲット部材に対して上下方向に移動させて取得した、前記検出部により上下方向における前記上下用ターゲット部材が検出される状態と検出されない状態とが切り換わるタイミングに基づいて、上下方向における前記上下用ターゲット部材の位置を取得するとともに、
取得された上下方向における前記上下用ターゲット部材の位置と、予め取得されている、前記上下用ターゲット部材の位置と前記基板の前記置き場との間の上下方向における相対的な位置関係とに基づいて、上下方向における前記基板の前記置き位置および前記取り位置の少なくともいずれかの補正を行う、請求項1に記載の基板搬送用ロボットシステム。
【請求項3】
前記上下用ターゲット部材は、前記水平用ターゲット部材と同一のターゲット部材である、請求項2に記載の基板搬送用ロボットシステム。
【請求項4】
前記水平用ターゲット部材は、第1の前記水平用ターゲット部材と、水平面内において前記第1の水平用ターゲット部材とは異なる位置に配置された第2の前記水平用ターゲット部材と、を含み、
前記制御部は、水平面内における前記第1の水平用ターゲット部材の前記中心位置と、水平面内における前記第2の水平用ターゲット部材の前記中心位置と、予め取得されている、前記第1の水平用ターゲット部材の前記中心位置と前記第2の水平用ターゲット部材の前記中心位置との間の水平面内における相対的な位置関係とに基づいて、水平面内における前記ロボットアームの座標系に対する前記基板の前記置き場の座標系の傾きを取得する、請求項1に記載の基板搬送用ロボットシステム。
【請求項5】
前記ハンドは、二股状に分岐した第1先端部および第2先端部を含み、
前記検出部は、前記第1先端部と前記第2先端部との間の空間を通過する検出光が遮られたか否かに基づいて、前記水平用ターゲット部材を検出する透過型センサであり、
前記制御部は、
前記検出光が遮られる位置を変えながら前記水平用ターゲット部材に対して前記ハンドを接近させて前記検出光が遮られた前記ハンドの複数の位置に基づいて、前記ハンドに対する前記検出光の向きを取得するとともに、
取得された前記検出光の向きに基づいて、前記水平用ターゲット部材に対して前記ハンドが接近する方向と前記検出光の向きとが直交するように、前記ロボットアームの座標系をキャリブレーションする、請求項1に記載の基板搬送用ロボットシステム。
【請求項6】
ロボットアームと、前記ロボットアームの先端に取り付けられたハンドと、上下方向から見て円形形状を有し、水平面内における基板の置き位置および取り位置の少なくともいずれかの補正のための水平用ターゲット部材を検出する検出部と、を備え、前記基板を搬送する基板搬送用ロボットによる基板の置き位置および取り位置の少なくともいずれかの補正方法であって、
前記ハンドを前記水平用ターゲット部材に対して水平面内の第1の方向から接近させて、前記検出部を用いて、前記水平用ターゲット部材の外周縁部に対応する第1の接線を取得することと、
前記ハンドを前記水平用ターゲット部材に対して前記第1の方向とは異なる水平面内の第2の方向から接近させて、前記検出部を用いて、前記水平用ターゲット部材の前記外周縁部に対応する第2の接線を取得することと、
取得した前記第1の接線と、取得した前記第2の接線とに基づいて、前記水平用ターゲット部材の中心位置を取得することと、
取得された前記中心位置と、予め取得されている、前記中心位置と前記基板の置き場との間の水平面内における相対的な位置関係とに基づいて、水平面内における前記基板の前記置き位置および前記取り位置の少なくともいずれかの補正を行うことと、を備える、基板搬送用ロボットによる基板の置き位置および取り位置の少なくともいずれかの補正方法。
発明の詳細な説明
【技術分野】
【0001】
この開示は、基板搬送用ロボットシステム、および、基板搬送用ロボットによる基板の置き位置および取り位置の少なくともいずれかの補正方法に関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
従来、水平面内における基板の置き位置の補正を行う基板搬送用ロボットが知られている。たとえば、特許文献1には、特定された水平面内におけるターゲットの中心位置と、予め取得されている、ターゲットの中心位置と基板の置き場との間の水平面内における相対的な位置関係とに基づいて、水平面内における基板の置き位置の補正を行う基板搬送用ロボットが開示されている。ターゲットは、水平面内における基板の置き位置の補正を行うために、基板の置き場に対して所定の位置に配置されている。
【0003】
特許文献1に開示されている基板搬送用ロボットは、以下のように、水平面内におけるターゲットの中心位置を特定する。まず、ターゲットがセンサにより検出され始めるまで、ロボットアームの先端に取り付けられたハンドをターゲットに対して接近させる。そして、ハンドを揺動させる。ハンドを揺動させることにより変化したセンサの検出信号に基づいて、ハンドのオフセット量を算出する。算出したオフセット量に基づいて、ハンドの位置をシフトさせる。そして、水平面内におけるターゲットの中心位置が特定されるまで、ハンドの揺動、ハンドのオフセット量の算出、ハンドの位置のシフト、等を繰り返す。
【先行技術文献】
【特許文献】
【0004】
特許第6637494号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の基板搬送用ロボットでは、水平面内におけるターゲットの中心位置の特定を行うために、ハンドの揺動、ハンドのオフセット量の算出、ハンドの位置のシフト、等を繰り返す必要があるので、水平面内におけるターゲットの位置の特定を行うための時間が比較的長くなると考えられる。すなわち、水平面内における基板の置き位置を補正するための時間が比較的長くなると考えられる。なお、上記特許文献1には記載されていないが、上記特許文献1に記載されているような基板搬送用ロボットにおいて、水平面内における基板の取り位置の補正を行う場合も、水平面内における基板の置き位置の補正を行う場合と同様の問題が考えられる。このため、水平面内における基板の置き位置および取り位置の少なくともいずれかを補正するための時間を短縮することが可能な構成が望まれている。
【0006】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、水平面内における基板の置き位置および取り位置の少なくともいずれかを補正するための時間を短縮することが可能な基板搬送用ロボットシステム、および、基板搬送用ロボットによる基板の置き位置および取り位置の少なくともいずれかの補正方法を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、この開示の第1の局面による基板搬送用ロボットシステムは、基板を搬送する基板搬送用ロボットと、上下方向から見て円形形状を有し、水平面内における基板の置き位置および取り位置の少なくともいずれかの補正のための水平用ターゲット部材と、制御部と、を備え、基板搬送用ロボットは、ロボットアームと、ロボットアームの先端に取り付けられたハンドと、ハンドに配置され、水平用ターゲット部材の外周縁部を検出する検出部と、を備え、制御部は、ハンドを水平用ターゲット部材に対して水平面内の第1の方向から接近させて検出部を用いて取得した水平用ターゲット部材の外周縁部に対応する第1の接線と、ハンドを水平用ターゲット部材に対して第1の方向とは異なる水平面内の第2の方向から接近させて検出部を用いて取得した水平用ターゲット部材の外周縁部に対応する第2の接線とに基づいて、水平面内における水平用ターゲット部材の中心位置を取得するとともに、取得された水平面内における水平用ターゲット部材の中心位置と、予め取得されている、水平用ターゲット部材の中心位置と基板の置き場との間の水平面内における相対的な位置関係とに基づいて、水平面内における基板の置き位置および取り位置の少なくともいずれかの補正を行う。
【0008】
この開示の第1の局面による基板搬送用ロボットシステムでは、上記のように、制御部は、ハンドを水平用ターゲット部材に対して水平面内の第1の方向から接近させて検出部を用いて取得した水平用ターゲット部材の外周縁部に対応する第1の接線と、ハンドを水平用ターゲット部材に対して第1の方向とは異なる水平面内の第2の方向から接近させて検出部を用いて取得した水平用ターゲット部材の外周縁部に対応する第2の接線とに基づいて、水平面内における水平用ターゲット部材の中心位置を取得する。これにより、第1の接線および第2の接線の各々を1度ずつ取得すれば、第1の接線と、第2の接線とに基づいて、直ぐに水平用ターゲット部材の中心位置を取得することができる。すなわち、水平面内におけるターゲット部材の中心位置の特定を行うために、ハンドの揺動、ハンドのオフセット量の算出、ハンドの位置のシフト、等を繰り返す場合と比較して、水平面内における水平用ターゲット部材の中心位置を迅速に取得することができる。これにより、水平面内における基板の置き位置および取り位置の少なくともいずれかを迅速に補正することができる。その結果、水平面内における基板の置き位置および取り位置の少なくともいずれかを補正するための時間を短縮することができる。
【0009】
また、上記目的を達成するために、この開示の第2の局面による基板搬送用ロボットによる基板の置き位置および取り位置の少なくともいずれかの補正方法は、ロボットアームと、ロボットアームの先端に取り付けられたハンドと、上下方向から見て円形形状を有し、水平面内における基板の置き位置および取り位置の少なくともいずれかの補正のための水平用ターゲット部材を検出する検出部と、を備え、基板を搬送する基板搬送用ロボットによる基板の置き位置および取り位置の少なくともいずれかの補正方法であって、ハンドを水平用ターゲット部材に対して水平面内の第1の方向からから接近させて、検出部を用いて、水平用ターゲット部材の外周縁部の第1の接線を取得することと、ハンドを水平用ターゲット部材に対して第1の方向とは異なる水平面内の第2の方向から接近させて、検出部を用いて、水平用ターゲット部材の外周縁部の第2の接線を取得することと、取得した第1の接線と、取得した第2の接線とに基づいて、水平用ターゲット部材の中心位置を取得することと、取得された中心位置と、予め取得されている、中心位置と基板の置き場との間の水平面内における相対的な位置関係とに基づいて、水平面内における基板の置き位置および取り位置の少なくともいずれかの補正を行うことと、を備える。
【0010】
この開示の第2の局面による基板搬送用ロボットによる基板の置き位置および取り位置の少なくともいずれかの補正方法では、上記のように、ハンドを水平用ターゲット部材に対して水平面内の第1の方向からから接近させて、検出部を用いて、水平用ターゲット部材の外周縁部の第1の接線を取得することが行われる。また、ハンドを水平用ターゲット部材に対して第1の方向とは異なる水平面内の第2の方向から接近させて、検出部を用いて、水平用ターゲット部材の外周縁部の第2の接線を取得することが行われる。また、取得した第1の接線と、取得した第2の接線とに基づいて、水平用ターゲット部材の中心位置を取得することが行われる。これにより、第1の局面による基板搬送用ロボットシステムと同様に、第1の接線および第2の接線を1度取得すれば、第1の接線と、第2の接線とに基づいて、直ぐに水平用ターゲット部材の中心位置を取得することができる。その結果、第1の局面による基板搬送用ロボットシステムと同様に、水平面内における基板の置き位置を補正するための時間を短縮することができる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社コロナ
操作装置
13日前
HOYA株式会社
光源装置
12日前
三菱電機株式会社
静止誘導器
1か月前
太陽誘電株式会社
全固体電池
1か月前
株式会社GSユアサ
蓄電装置
27日前
大日本印刷株式会社
流路部材
20日前
富士電機株式会社
半導体装置
18日前
太陽誘電株式会社
全固体電池
26日前
太陽誘電株式会社
コイル部品
5日前
トヨタ自動車株式会社
コイル
23日前
太陽誘電株式会社
コイル部品
5日前
太陽誘電株式会社
全固体電池
11日前
中国電力株式会社
直線スリーブ
25日前
東レ株式会社
固体電解質用補強シート
27日前
株式会社村田製作所
コイル部品
1か月前
トヨタ自動車株式会社
コイル線
23日前
トヨタ自動車株式会社
コイル線
23日前
トヨタ自動車株式会社
コイル線
23日前
東レ株式会社
ポリマー電解質および電池
6日前
ヒロセ電機株式会社
電気コネクタ
26日前
ヒロセ電機株式会社
電気コネクタ
26日前
ローム株式会社
半導体装置
27日前
個人
組み合わせアース端子
18日前
ローム株式会社
半導体装置
23日前
トヨタ自動車株式会社
収容ケース
24日前
日本無線株式会社
レーダアンテナ
20日前
住友電気工業株式会社
半導体装置
24日前
ローム株式会社
半導体装置
1か月前
富士電機株式会社
半導体装置
18日前
矢崎総業株式会社
端子
1か月前
三菱電機株式会社
半導体装置
3日前
三菱電機株式会社
半導体装置
11日前
三菱電機株式会社
半導体装置
26日前
株式会社ノーリツ
燃料電池ユニット
17日前
日本航空電子工業株式会社
コネクタ
11日前
富士電機株式会社
半導体装置
25日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ