TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024054476
公報種別
公開特許公報(A)
公開日
2024-04-17
出願番号
2022160707
出願日
2022-10-05
発明の名称
情報処理装置、移動体および情報処理方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G09B
29/00 20060101AFI20240410BHJP(教育;暗号方法;表示;広告;シール)
要約
【課題】地図情報を保持するメモリに求められる容量を抑えつつ、地図情報を用いた移動体の位置姿勢の推定精度を高める。
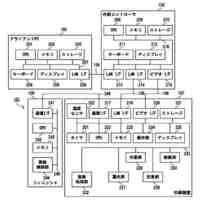
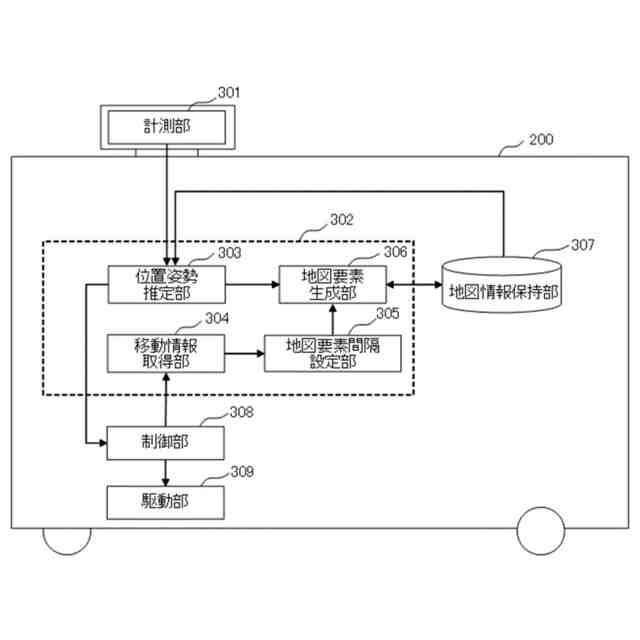
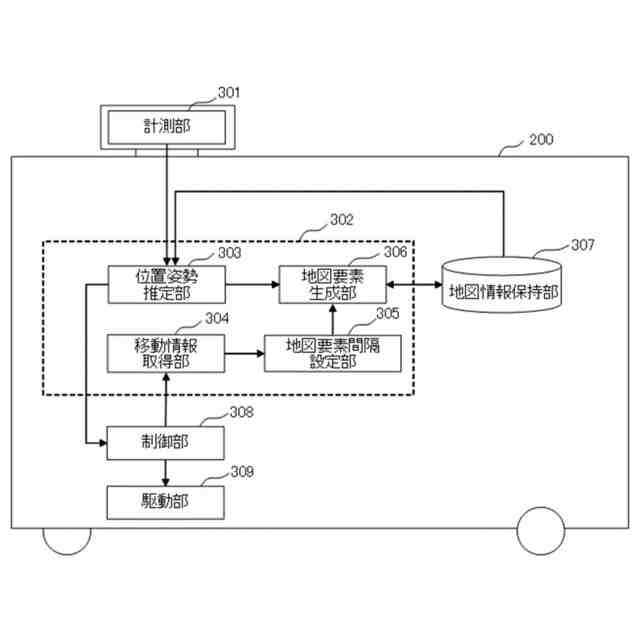
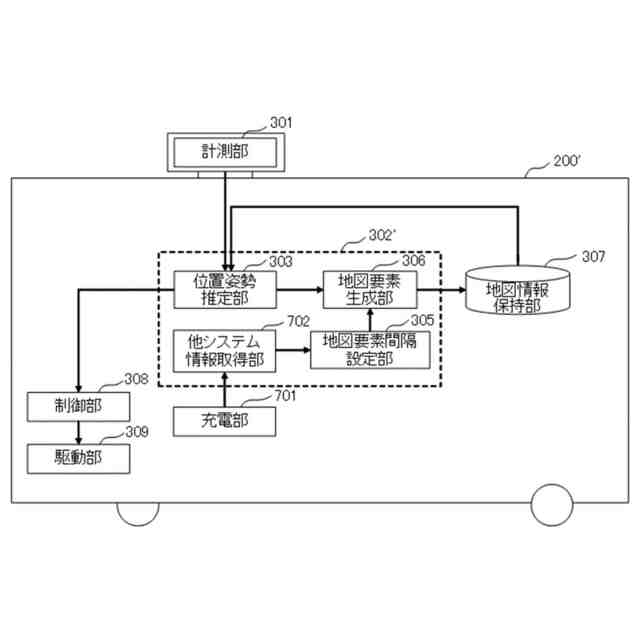
【解決手段】情報処理装置は、移動体200が移動する環境において移動体に搭載されたセンサ301から取得された情報を用いて、移動体の位置および姿勢を推定するとともに環境の地図情報を作成する処理手段303,306と、移動体が移動する経路上において、移動体の移動を制御する制御情報に基づいて地図情報を構成する地図要素を生成する間隔を変更する変更手段304,305とを有する。
【選択図】図3
特許請求の範囲
【請求項1】
移動体が移動する環境において前記移動体に搭載されたセンサから取得された情報を用いて、前記移動体の位置および姿勢を推定するとともに前記環境の地図情報を作成する処理手段と、
前記移動体が移動する経路上において、前記移動体の移動を制御する制御情報に基づいて前記地図情報を構成する地図要素を生成する間隔を変更する変更手段とを有することを特徴とする情報処理装置。
続きを表示(約 950 文字)
【請求項2】
前記変更手段は、前記移動体を制御する速度に基づいて前記間隔を変更することを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記変更手段は、前記速度が低いほど前記間隔を小さくすることを特徴とする請求項2に記載の情報処理装置。
【請求項4】
移動体が移動する環境において前記移動体に搭載されたセンサから取得された情報を用いて、前記移動体の位置および姿勢を推定するとともに前記環境の地図情報を作成する処理手段と、
前記移動体が移動する経路上において、前記移動体の位置と所定位置または物体との間の距離に基づいて前記地図情報を構成する地図要素を生成する間隔を変更する変更手段とを有することを特徴とする情報処理装置。
【請求項5】
前記変更手段は、前記距離が短いほど前記間隔を小さくすることを特徴とする請求項4に記載の情報処理装置。
【請求項6】
前記変更手段は、前記移動体の周辺システムが生成する情報に応じて前記間隔を変更することを特徴とする請求項1に記載の情報処理装置。
【請求項7】
前記変更手段は、前記位置および姿勢の推定において誤差要因となる情報を取得し、該誤差要因となる情報に応じて前記間隔を変更することを特徴とする請求項1に記載の情報処理装置。
【請求項8】
前記変更手段は、移動体と前記センサとしてのカメラから得られた画像情報における特徴点の位置との間の距離を取得し、前記誤差要因となる情報としての前記距離が所定距離以上または未満である特徴点の数、割合および分布のいずれかに応じて前記間隔を変更することを特徴とする請求項7に記載の情報処理装置。
【請求項9】
前記変更手段は、前記移動体とその周辺の物体との距離、前記環境の照度および前記移動体が移動する床面の粗さのうち少なくとも1つを前記誤差要因となる情報として取得することを特徴とする請求項7に記載の情報処理装置。
【請求項10】
前記間隔の変更に関する情報を表示手段に表示させる出力手段を有することを特徴とする請求項1に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体を自動で移動させるための情報処理技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
AGV(Automated Guided Vehicle)等の移動体を工場や物流倉庫等の特定環境内で自動的に移動させる場合に、実空間の地図情報を作成し、実空間内での移動体の位置や姿勢を推定することがある。このための手法として、SLAM(Simultaneous Localization And Mapping)が知られている。
【0003】
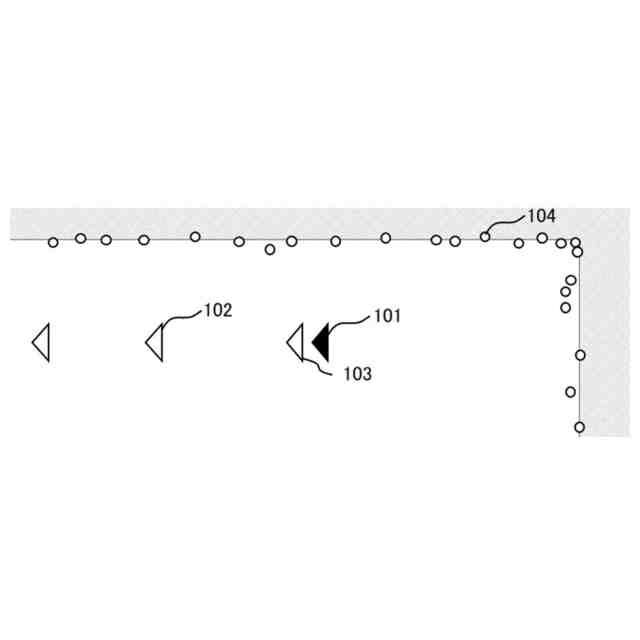
特許文献1には、SLAMによるカメラの位置や姿勢の推定において、その指標となる画像中の特徴点を間欠的なカメラ位置で記録することが開示されている。1つのカメラ位置での位置や姿勢を推定するための指標の情報を地図要素という。また特許文献1には、位置姿勢推定の精度を向上させるため、カメラの変位や回転速度に基づいて地図要素を生成する手法が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-144710号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された手法では、地図要素の増加によってメモリ容量を圧迫し、処理速度が低下するおそれがある。
【0006】
本発明は、地図情報を保持するメモリに求められる容量を抑えつつ、地図情報を用いた移動体の位置姿勢の推定精度を高めることができるようにした情報処理装置等を提供する。
【課題を解決するための手段】
【0007】
本発明の一側面としての情報処理装置は、移動体が移動する環境において移動体に搭載されたセンサから取得された情報を用いて、移動体の位置および姿勢を推定するとともに環境の地図情報を作成する処理手段と、移動体が移動する経路上において、移動体の移動を制御する制御情報に基づいて地図情報を構成する地図要素を生成する間隔を変更する変更手段とを有することを特徴とする。
【0008】
本発明の他の一側面としての情報処理装置は、移動体が移動する環境において移動体に搭載されたセンサから取得された情報を用いて、移動体の位置および姿勢を推定するとともに環境の地図情報を作成する処理手段と、移動体が移動する経路上において、移動体の位置と所定位置または物体との間の距離に基づいて地図情報を構成する地図要素を生成する間隔を変更する変更手段とを有することを特徴とする。なお、上記情報処理装置を搭載した移動体も、本発明の他の一側面を構成する。
【0009】
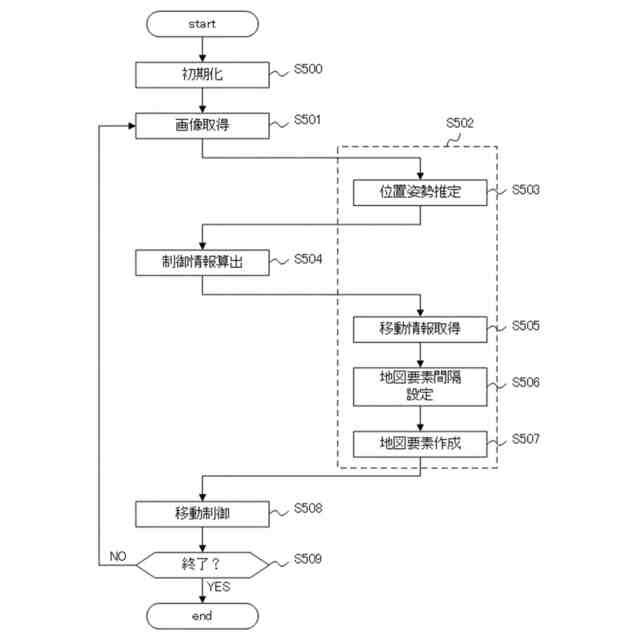
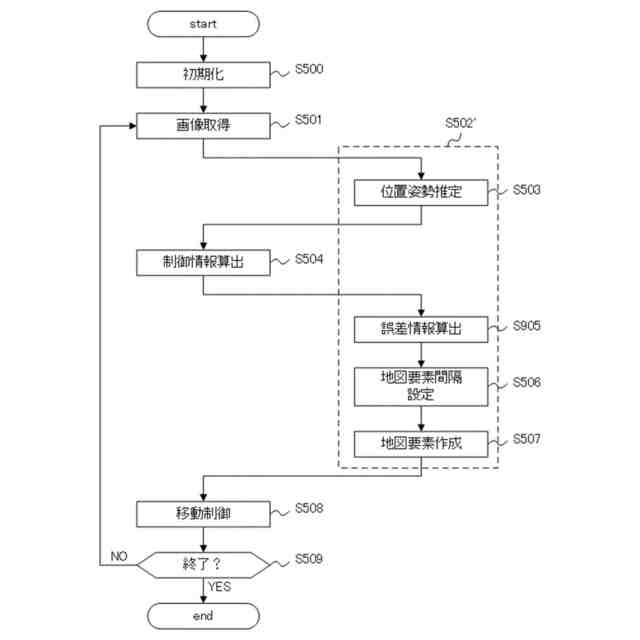
また本発明の他の一側面としての情報処理方法は、移動体が移動する環境において移動体に搭載されたセンサから取得された情報を用いて、移動体の位置および姿勢を推定するとともに環境の地図情報を作成するステップと、移動体が移動する経路上において、移動体の移動を制御する制御情報に基づいて地図情報を構成する地図要素を生成する間隔を変更するステップとを有することを特徴とする。
【0010】
さらに本発明の他の一側面としての情報処理方法は、移動体が移動する環境において移動体に搭載されたセンサから取得された情報を用いて、移動体の位置および姿勢を推定するとともに環境の地図情報を作成するステップと、移動体が移動する経路上において、移動体の位置と所定位置または物体との間の距離に基づいて地図情報を構成する地図要素を生成する間隔を変更するステップとを有することを特徴とする。なお、上記情報処理方法に従う処理をコンピュータに実行させるプログラムも、本発明の他の一側面を構成する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
14日前
キヤノン株式会社
トナー
14日前
キヤノン株式会社
梱包箱
21日前
キヤノン株式会社
制御装置
今日
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
記録装置
19日前
キヤノン株式会社
表示装置
20日前
キヤノン株式会社
電子機器
5日前
キヤノン株式会社
記録装置
12日前
キヤノン株式会社
発光装置
7日前
キヤノン株式会社
光学機器
5日前
キヤノン株式会社
カメラ装置
5日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
21日前
キヤノン株式会社
画像形成装置
21日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
液滴吐出装置
5日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
有機発光素子
12日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
21日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ