TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024044583
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022150202
出願日
2022-09-21
発明の名称
プラント応答推定装置、プラント応答推定方法、及びプログラム
出願人
富士電機株式会社
代理人
個人
,
個人
主分類
G05B
13/04 20060101AFI20240326BHJP(制御;調整)
要約
【課題】操業中のプラントの運転データから応答モデルのパラメータを安定的に推定することができる技術を提供すること。
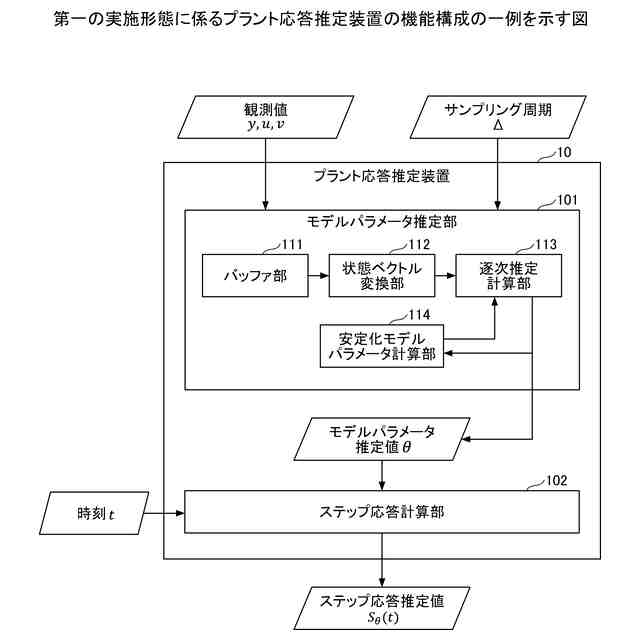
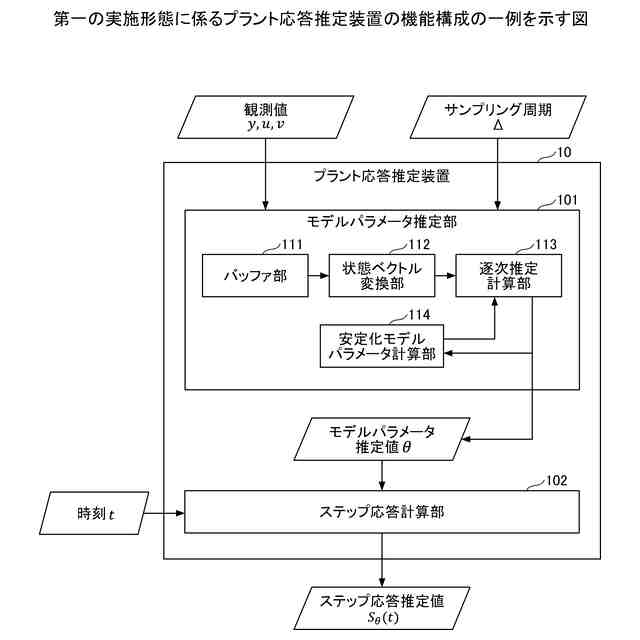
【解決手段】本開示の一態様によるプラント応答推定装置は、制御対象プラントの運転データに基づいて、前記制御対象プラントのプラント応答モデルを表す関数のパラメータであるモデルパラメータの推定値を逐次的に計算するように構成されている推定計算部と、前記モデルパラメータの推定値を安定化した安定化モデルパラメータを計算するように構成されている安定化計算部と、前記モデルパラメータの推定値に基づいて、前記プラント応答モデルを表す関数により前記制御対象プラントの応答を計算するように構成されている応答計算部と、を有し、前記推定計算部は、前記運転データと、前回計算したモデルパラメータの推定値を前記安定化計算部によって安定化した安定化モデルパラメータとに基づいて、前記モデルパラメータの推定値を計算するように構成されている。
【選択図】図2
特許請求の範囲
【請求項1】
制御対象プラントの運転データに基づいて、前記制御対象プラントのプラント応答モデルを表す関数のパラメータであるモデルパラメータの推定値を逐次的に計算するように構成されている推定計算部と、
前記モデルパラメータの推定値を安定化した安定化モデルパラメータを計算するように構成されている安定化計算部と、
前記モデルパラメータの推定値に基づいて、前記プラント応答モデルを表す関数により前記制御対象プラントの応答を計算するように構成されている応答計算部と、
を有し、
前記推定計算部は、
前記運転データと、前回計算したモデルパラメータの推定値を前記安定化計算部によって安定化した安定化モデルパラメータとに基づいて、前記モデルパラメータの推定値を計算するように構成されている、プラント応答推定装置。
続きを表示(約 1,700 文字)
【請求項2】
前記安定化計算部は、
前記モデルパラメータの推定値を表すベクトルの各要素から所定の統計量を計算し、前記統計量により前記モデルパラメータの推定値を安定化した安定化モデルパラメータを計算するように構成されている、請求項1に記載のプラント応答推定装置。
【請求項3】
前記プラント応答モデルは多項式モデルであり、
前記安定化計算部は、
前記多項式モデルの次元毎に、前記モデルパラメータの推定値を表すベクトルの各要素のうち、前記次元方向の要素から前記統計量を計算し、
前記次元毎に、前記次元方向の要素を前記統計量で置換した第1のパラメータを計算し、
前記第1のパラメータと前記モデルパラメータとを所定の比率で混合した第2のパラメータを計算し、
前記第2のパラメータを用いて前記制御対象プラントの応答を予測したときの第1の予測誤差が、前記モデルパラメータを用いて前記制御対象プラントの応答を予測したときの第2の予測誤差よりも所定以上改善している場合は前記第2のパラメータを前記安定化モデルパラメータとし、前記第1の予測誤差が前記第2の予測誤差よりも所定以上改善していない場合は前記モデルパラメータを前記安定化モデルパラメータとする、ように構成されている、請求項2に記載のプラント応答推定装置。
【請求項4】
前記多項式モデルは、ARMAモデル又はARMAXモデルであり、
前記モデルパラメータは、前記ARMAモデル又はARMAXモデルの係数を要素とするベクトルで表される、請求項3に記載のプラント応答推定装置。
【請求項5】
前記安定化計算部は、
前記ARMAモデル又はARMAXモデルの自己回帰係数の平均値を表す第1の重心と、前記ARMAモデル又はARMAXモデルの移動平均係数の平均値を表す第2の重心とを前記統計量として計算し、
前記自己回帰係数を前記第1の重心、前記移動平均係数を前記第2の重心でそれぞれ置換することで、前記第2のパラメータを計算する、ように構成されている、請求項4に記載のプラント応答推定装置。
【請求項6】
前記ARMAモデル又はARMAXモデルには、前記制御対象プラントの定常状態を表すオフセット項が含まれる、請求項4又は5に記載のプラント応答推定装置。
【請求項7】
制御対象プラントの運転データに基づいて、前記制御対象プラントのプラント応答モデルを表す関数のパラメータであるモデルパラメータの推定値を逐次的に計算する推定計算手順と、
前記モデルパラメータの推定値を安定化した安定化モデルパラメータを計算する安定化計算手順と、
前記モデルパラメータの推定値に基づいて、前記プラント応答モデルを表す関数により前記制御対象プラントの応答を計算する応答計算手順と、
をコンピュータが実行し、
前記推定計算手順は、
前記運転データと、前回計算したモデルパラメータの推定値を前記安定化計算手順によって安定化した安定化モデルパラメータとに基づいて、前記モデルパラメータの推定値を計算する、プラント応答推定方法。
【請求項8】
制御対象プラントの運転データに基づいて、前記制御対象プラントのプラント応答モデルを表す関数のパラメータであるモデルパラメータの推定値を逐次的に計算する推定計算手順と、
前記モデルパラメータの推定値を安定化した安定化モデルパラメータを計算する安定化計算手順と、
前記モデルパラメータの推定値に基づいて、前記プラント応答モデルを表す関数により前記制御対象プラントの応答を計算する応答計算手順と、
をコンピュータに実行させ、
前記推定計算手順は、
前記運転データと、前回計算したモデルパラメータの推定値を前記安定化計算手順によって安定化した安定化モデルパラメータとに基づいて、前記モデルパラメータの推定値を計算する、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、プラント応答推定装置、プラント応答推定方法、及びプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
温調制御装置やPLC(Programmable Logic Controller)、DCS(Distributed Control System)等の制御装置、パーソナルコンピュータや組み込み制御機器上で実装される制御装置等が産業上広く利用されている。
【0003】
また、制御対象の制御量を目標値に追従させることを目的とする制御方式として、PID(Proportional-Integral-Differential)制御、モデル予測制御、内部モデル制御、LQG(Linear-Quadratic-Gaussian)制御、H2制御、H∞制御等の各種の制御方式が知られている。
【0004】
モデル予測制御は、制御対象の状態空間モデルや将来の時間応答モデルを用いた最適化計算を逐次的に行うことで望ましい応答を得る方式であり、産業界で広く用いられている(例えば、特許文献1、非特許文献1)。このようなモデル予測制御等で用いられる線形予測モデルに関してそのモデルパラメータを推定(同定)する手法として、逐次最小2乗法(RLS法:Recursive Least Squares法)やカルマンフィルタ法等が知られている(例えば、非特許文献2、非特許文献3)。
【0005】
なお、制御対象プラントの定常状態を表すオフセット項が含まれるモデルパラメータを推定する技術も知られている(例えば、特許文献3)。
【先行技術文献】
【特許文献】
【0006】
特開2020-21411号公報
特許第7047966号公報
【非特許文献】
【0007】
ヤン M. マチエヨフスキー,「モデル予測制御 制約のもとでの最適制御」,東京電機大学出版局,2005
足立 修一,「MATLABによる制御のためのシステム同定」,東京電機大学出版局,1996
足立 修一,「MATLABによる制御のための上級システム同定」,東京電機大学出版局,2004
【発明の概要】
【発明が解決しようとする課題】
【0008】
逐次最小2乗法やカルマンフィルタ法は、操業中(運転中)のプラントのデータから逐次的にモデルパラメータを推定できる点で大変有益であるが、モデルパラメータの推定値が逐次的に更新されるため以下の2つの課題がある。
【0009】
1つ目の課題は、真値に収束するまでの途中の段階ではモデルパラメータの推定値の信頼性が担保されないという点である。2つ目の課題は、真のモデルパラメータの次数が事前に未知であるため、推定対象のモデルパラメータが過剰な次数を持つ場合には多重共線性が生じ得るという点である。
【0010】
上記の2つの課題により、例えば、本来安定であるはずのプラントに対して不安定極を持つようなモデルパラメータが途中で計算されたり、観測ノイズの影響によってモデルパラメータが大きく変動したり、多重共線性によって複数の局所最適解が生じたりする等といった不安定性が生じる恐れがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士電機株式会社
半導体装置
2日前
富士電機株式会社
半導体装置
3日前
富士電機株式会社
電力変換装置
3日前
富士電機株式会社
物理量出力回路
1日前
富士電機株式会社
半導体モジュール
8日前
富士電機株式会社
炭化珪素半導体装置
1日前
富士電機株式会社
半導体装置および半導体装置の製造方法
3日前
富士電機株式会社
半導体装置および半導体装置の製造方法
3日前
富士電機株式会社
半導体装置
2日前
富士電機株式会社
炭化珪素半導体装置の製造方法および炭化珪素エピタキシャル基板の製造方法
14日前
株式会社クボタ
作業車
1か月前
アズビル株式会社
電圧出力回路
1か月前
アズビル株式会社
流量制御装置
24日前
ミネベアミツミ株式会社
入力装置
15日前
株式会社エクセディ
作業ロボット
3日前
トヨタ自動車株式会社
自動走行搬送車
23日前
エイブリック株式会社
ボルテージレギュレータ
23日前
三菱電機株式会社
移動体制御装置
2日前
株式会社クボタ
故障診断装置
22日前
株式会社クボタ
操作機構及び作業車
1か月前
日本プラスト株式会社
節度感付加装置
1か月前
岩田工機株式会社
加工装置
2日前
リックス株式会社
状態検出装置
18日前
株式会社デンソー
制御装置
28日前
株式会社デンソー
制御装置
28日前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社GSユアサ
電力変換装置
1か月前
村田機械株式会社
搬送車システム
8日前
株式会社デンソー
電子制御装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
28日前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
村田機械株式会社
走行車システム
1か月前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ