TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024043998
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022149286
出願日
2022-09-20
発明の名称
ディスク装置
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G11B
5/596 20060101AFI20240326BHJP(情報記憶)
要約
【課題】ヘッドの位置決め制御の精度を向上する。
【解決手段】一つの実施形態によれば、ディスク装置において、コントローラは、サーボトラックからリードされるサーボ情報に基づいてヘッドを目標データトラックに位置決め制御する際に、第1の周方向位置におけるサーボトラックの径方向位置の補正値スペクトルの振幅と第2の周方向位置におけるサーボトラックの径方向位置の補正値スペクトルの振幅との比に応じて、サーボトラックの径方向位置の補正値を調整する。第1の周方向位置では、目標データトラックの径方向位置に対するサーボトラックの径方向位置の変化の相対速度が第1の速度となる。第2の周方向位置では、目標データトラックの径方向位置に対するサーボトラックの径方向位置の変化の相対速度が第2の速度となる。
【選択図】図1
特許請求の範囲
【請求項1】
ヘッドと、
第1の中心に対して同心円状に複数のサーボトラックが規定され、前記第1の中心と異なる第2の中心に対して同心円状に複数のデータトラックが規定されるディスクと、
前記サーボトラックからリードされるサーボ情報に基づいて前記ヘッドを目標データトラックに位置決め制御する際に、第1の周方向位置における前記サーボトラックの径方向位置の補正値スペクトルの振幅と第2の周方向位置における前記サーボトラックの径方向位置の補正値スペクトルの振幅との比に応じて、前記サーボトラックの径方向位置の補正値を調整するコントローラと、
を備え、
前記第1の周方向位置では、前記目標データトラックの径方向位置に対する前記サーボトラックの径方向位置の変化の相対速度が第1の速度となり、
前記第2の周方向位置では、前記目標データトラックの径方向位置に対する前記サーボトラックの径方向位置の変化の相対速度が第2の速度となる
ディスク装置。
続きを表示(約 1,600 文字)
【請求項2】
前記第1の周方向位置は、前記目標データトラックの径方向位置に対する前記サーボトラックの径方向位置の変化の相対速度が最大速度となり、
前記第2の周方向位置は、前記目標データトラックの径方向位置に対する前記サーボトラックの径方向位置の変化の相対速度がゼロとなる
請求項1に記載のディスク装置。
【請求項3】
前記コントローラは、前記目標データトラックの径方向位置に対する前記サーボトラックの径方向位置の変化における複数の次数の成分について、前記第1の周方向位置における前記サーボトラックの径方向位置の補正値スペクトルの振幅と前記第2の周方向位置における前記サーボトラックの径方向位置の補正値スペクトルの振幅との比を求め、求められた比に応じて、調整すべき成分の次数を決定する
請求項1に記載のディスク装置。
【請求項4】
前記コントローラは、前記決定された次数について補正値スペクトルと前記サーボトラックの径方向位置との関係を示す関係情報を生成し、前記関係情報を用いて前記第2の周方向位置における前記サーボトラックの径方向位置の変動量を推定する
請求項3に記載のディスク装置。
【請求項5】
前記コントローラは、前記第2の周方向位置について増幅する第1の重みづけを前記推定された変動量に対して施し、前記第2の周方向位置について減衰する第2の重みづけを前記サーボトラックの径方向位置の補正値に対して施し、前記第2の重みづけが施された補正値と前記第1の重みづけが施された変動量とを合成し、前記調整された補正値を得る
請求項3に記載のディスク装置。
【請求項6】
前記コントローラは、前記調整された補正値を用いて前記ヘッドを前記目標データトラックに位置決め制御する
請求項1に記載のディスク装置。
【請求項7】
ヘッドと、
第1の中心に対して同心円状に複数のサーボトラックが規定され、前記第1の中心と異なる第2の中心に対して同心円状に複数のデータトラックが規定されるディスクと、
前記サーボトラックからリードされるサーボ情報に基づいて前記ヘッドを目標データトラックに位置決め制御する際に、第1の周方向位置における前記サーボトラックの径方向位置の補正値スペクトルの振幅と第2の周方向位置における前記サーボトラックの径方向位置の補正値スペクトルの振幅との比に応じて、前記サーボトラックの径方向位置の補正値を調整するコントローラと、
を備え、
前記第1の周方向位置は、前記目標データトラックの径方向位置に対する前記サーボトラックの径方向位置の周期的な変化における第1の位相に対応し、
前記第2の周方向位置は、前記周期的な変化における第2の位相に対応する
ディスク装置。
【請求項8】
前記周期的な変化は、正弦波状の変化を含み、
前記第1の位相は、90度又は270度の位相であり、
前記第2の位相は、0度又は180度の位相である
請求項7に記載のディスク装置。
【請求項9】
前記コントローラは、前記周期的な変化における複数の次数の成分について、前記第1の周方向位置における前記サーボトラックの径方向位置の補正値スペクトルの振幅と前記第2の周方向位置における前記サーボトラックの径方向位置の補正値スペクトルの振幅との比を求め、求められた比に応じて、調整すべき次数を決定する
請求項7に記載のディスク装置。
【請求項10】
前記コントローラは、前記決定された次数について補正値と前記サーボトラックの径方向位置との関係を示す関係情報を生成し、前記関係情報を用いて前記第2の周方向位置における前記サーボトラックの径方向位置の変動量を推定する
請求項9に記載のディスク装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本実施形態は、ディスク装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
ヘッド及びディスクを有するディスク装置では、ディスクに、複数のサーボトラックと複数のデータトラックとがそれぞれ規定される。ディスク装置は、サーボトラックからリードされるサーボ情報に基づいてヘッドを目標データトラックに位置決め制御する。このとき、ディスク装置では、サーボトラックの径方向位置を適切に補正し、ヘッドの位置決め制御の精度を向上することが望まれる。
【先行技術文献】
【特許文献】
【0003】
米国特許第8077428号明細書
米国特許第6989956号明細書
米国特許第8120871号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
一つの実施形態は、ヘッドの位置決め制御の精度を向上できるディスク装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
一つの実施形態によれば、ヘッドとディスクとコントローラとを有するディスク装置が提供される。ディスクは、第1の中心に対して同心円状に複数のサーボトラックが規定される。ディスクは、第2の中心に対して同心円状に複数のデータトラックが規定される。第2の中心は、第1の中心と異なる。コントローラは、サーボトラックからリードされるサーボ情報に基づいてヘッドを目標データトラックに位置決め制御する際に、第1の周方向位置におけるサーボトラックの径方向位置の補正値スペクトルの振幅と第2の周方向位置におけるサーボトラックの径方向位置の補正値スペクトルの振幅との比に応じて、サーボトラックの径方向位置の補正値を調整する。第1の周方向位置では、目標データトラックの径方向位置に対するサーボトラックの径方向位置の変化の相対速度が第1の速度となる。第2の周方向位置では、目標データトラックの径方向位置に対するサーボトラックの径方向位置の変化の相対速度が第2の速度となる。
【図面の簡単な説明】
【0006】
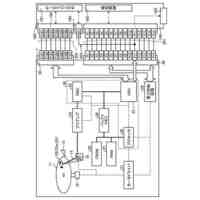
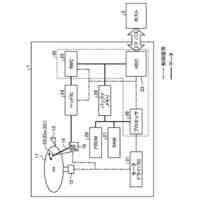
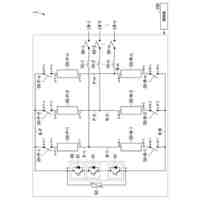
実施形態にかかるディスク装置の構成を示す図。
実施形態におけるディスクの構成を示す平面図。
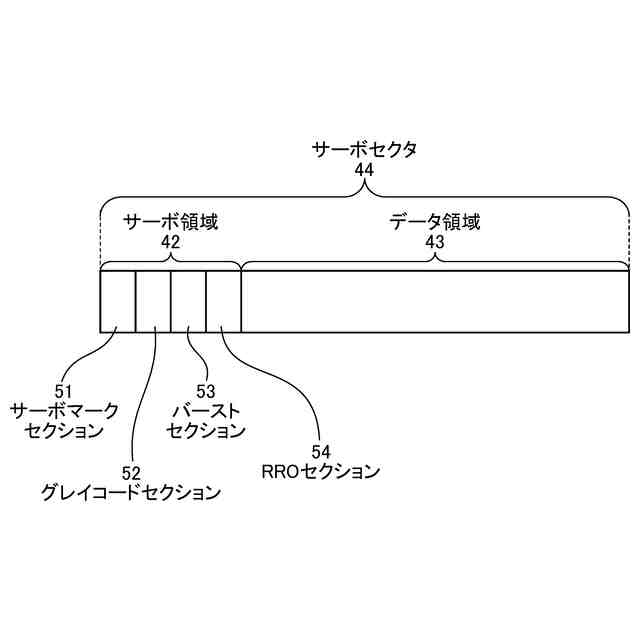
実施形態におけるサーボセクタの構成を示す図。
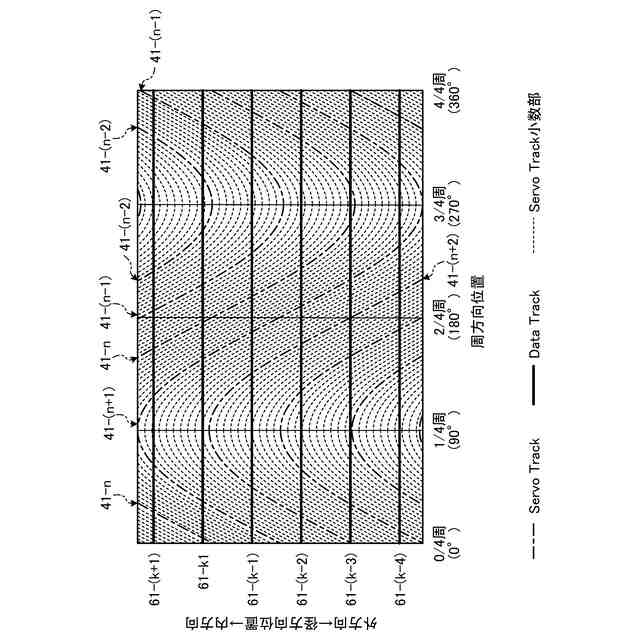
実施形態におけるサーボトラックの中心及びデータトラックの中心を示す図。
実施形態におけるサーボトラックの径方向位置に対するデータトラックの径方向位置の変化を示す図。
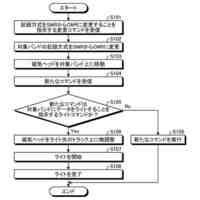
実施形態におけるコントローラの動作を示すフローチャート。
実施形態における周方向位置に対するRRO補正値の分布を示す図。
実施形態における周方向位置に対するRRO補正値径方向スペクトルの分布を示す図。
実施形態における複数の周方向位置に対するRRO補正値径方向スペクトルの振幅比の計算結果を示す図。
実施形態における周方向位置に対するDCピッチ変動量の分布を示す図。
実施形態におけるDCピッチ変動量に対する重みづけとRRO補正値径方向スペクトルに対する逆重みづけとを示す図。
実施形態におけるRRO補正値径方向スペクトルのRRO補正値への変換を示す図。
実施形態におけるDCピッチ変動量のRRO補正値への合成を示す図。
実施形態におけるオフセットライトの特性を示す図。
【発明を実施するための形態】
【0007】
以下に添付図面を参照して、実施形態にかかるディスク装置を詳細に説明する。なお、この実施形態により本発明が限定されるものではない。
【0008】
(実施形態)
実施形態にかかるディスク装置は、ヘッド及びディスクを有し、ディスクにおいて複数のサーボトラックと複数のデータトラックとがそれぞれ規定されるが、ヘッドを目標データトラックに位置決め制御する際の精度を向上するための工夫が施される。
【0009】
例えば、ディスク装置1は、図1に示すように構成される。図1は、ディスク装置1の構成を示す図である。
【0010】
ディスク装置1は、通信媒体を介して、ホスト2に接続される。通信媒体は、I/Fバス配線などの有線通信回線であってもよい。ディスク装置1は、ライトコマンドやリードコマンドなどのアクセスコマンドをホスト2から受信でき、コマンドに応じたレスポンスをホスト2へ送信できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
電源回路
1か月前
株式会社東芝
発電設備
22日前
株式会社東芝
検査装置
28日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
搬送ローラ
24日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
レーダ装置
14日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
24日前
株式会社東芝
アイソレータ
1か月前
株式会社東芝
固体撮像装置
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
信号伝送装置
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
アイソレータ
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
信号伝送装置
1か月前
株式会社東芝
半導体スイッチ
24日前
株式会社東芝
モータ制御装置
1か月前
株式会社東芝
紫外線照射装置
29日前
株式会社東芝
半導体記憶装置
1か月前
株式会社東芝
磁気ディスク装置
1か月前
株式会社東芝
直流電流遮断装置
24日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ