TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024044031
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022149340
出願日
2022-09-20
発明の名称
モータ制御装置
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
H02P
29/028 20160101AFI20240326BHJP(電力の発電,変換,配電)
要約
【課題】高度な制御と安定性の両立を実現する。
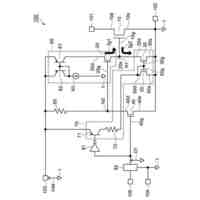
【解決手段】モータ制御装置は、第 1 制御回路と、第 2 制御回路と、判定回路と、指令回路と、を備える。第 1 制御回路は、角速度の指令値及び角速度の測定値から、ルールベースに基づいた第 1 制御値を出力する。第 2 制御回路は、前記角速度の指令値及び前記角速度の測定値から、学習済みモデルに基づいた第 2 制御値を出力する。判定回路は、少なくとも前記第 2 制御値に基づいて、状態を判定する。指令回路は、前記判定回路が判定した結果に基づいて、前記第 1 制御値及び前記第 2 制御値から制御指令値を取得して出力する。
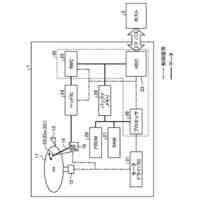
【選択図】図1
特許請求の範囲
【請求項1】
角速度の指令値及び角速度の測定値から、ルールベースに基づいた第 1 制御値を出力する、第 1 制御回路と、
前記角速度の指令値及び前記角速度の測定値から、学習済みモデルに基づいた第 2 制御値を出力する、第 2 制御回路と、
少なくとも前記第 2 制御値に基づいて、状態を判定する、判定回路と、
前記判定回路が判定した結果に基づいて、前記第 1 制御値及び前記第 2 制御値から制御指令値を取得して出力する、指令回路と、
を備える、モータ制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記指令回路は、
前記判定回路が前記第 2 制御値に異常を検知しない場合に、前記第 2 制御値を出力し、
前記判定回路が前記第 2 制御値に異常を検知した場合に、前記第 1 制御値を出力する、
請求項1に記載のモータ制御装置。
【請求項3】
前記第 2 制御回路は、ルールベースに基づいた制御値との差分を前記学習済みモデルに基づいた前記第 2 制御値として出力する、
請求項1に記載のモータ制御装置。
【請求項4】
前記指令回路は、
前記判定回路が前記第 2 制御値に異常を検知しない場合に、前記第 1 制御値に前記第 2 制御値を加算した値を出力し、
前記判定回路が前記第 2 制御値に異常を検知した場合に、前記第 1 制御値を出力する、
請求項3に記載のモータ制御装置。
【請求項5】
前記学習済みモデルは、強化学習により学習されたモデルであり、
前記判定回路は、前記学習済みモデルが出力する報酬に基づいて、前記状態を判定する、
請求項1から請求項4のいずれかに記載のモータ制御装置。
【請求項6】
前記学習済みモデルは、前記第 2 制御値と併せて尤度を出力するモデルであり、
前記判定回路は、前記尤度に基づいて、前記状態を判定する、
請求項1から請求項4のいずれかに記載のモータ制御装置。
【請求項7】
前記判定回路は、出力された電流の測定値の変化と、前記第 2 制御値の変化と、を比較して、前記状態を判定する、
請求項1から請求項4のいずれかに記載のモータ制御装置。
【請求項8】
前記判定回路は、前記出力された電流の測定値の変化の正負と、前記第 2 制御値の変化の正負と、が一致するか否かにより、前記状態を判定する、
請求項7に記載のモータ制御装置。
【請求項9】
前記判定回路は、前記出力された電流の測定値の変化の大きさと、前記第 2 制御値の変化の大きさと、の相違に基づいて、前記状態を判定する、
請求項7に記載のモータ制御装置。
【請求項10】
前記判定回路は、前記第 1 制御値と、前記第 2 制御値と、の差に基づいて、前記状態を判定する、
請求項2に記載のモータ制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、モータ制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
モータは、種々の装置に用いられてきており、このモータの制御は、長い間、広く研究、開発が行われてきている。特に、モータの動作を取得して、制御にフィードバックすることが、適切なモータの制御には必要である。
【0003】
ルールベースにしたがった PI 制御コントローラによれば、古典的な手法で安定した動作を実現することができる一方で、フィードバック制御に起因した遅延や脈動が発生する。近年行われている研究として、機械学習により学習されたモデルを用いたコントローラの例がある。この手法によれば柔軟かつ高度な制御を実現して遅延や脈動を抑制することが可能であるが、モデル内部における処理はブラックボックスとなり、完全な動作の保証や説明が難しいといった課題がある。
【先行技術文献】
【特許文献】
【0004】
特開平5-297904号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一実施形態は、高度な制御と安定性の両立を実現するモータ制御について提供する。
【課題を解決するための手段】
【0006】
一実施形態によれば、モータ制御装置は、第 1 制御回路と、第 2 制御回路と、判定回路と、指令回路と、を備える。第 1 制御回路は、角速度の指令値及び角速度の測定値から、ルールベースに基づいた第 1 制御値を出力する。第 2 制御回路は、前記角速度の指令値及び前記角速度の測定値から、学習済みモデルに基づいた第 2 制御値を出力する。判定回路は、少なくとも前記第 2 制御値に基づいて、状態を判定する。指令回路は、前記判定回路が判定した結果に基づいて、前記第 1 制御値及び前記第 2 制御値から制御指令値を取得して出力する。
【0007】
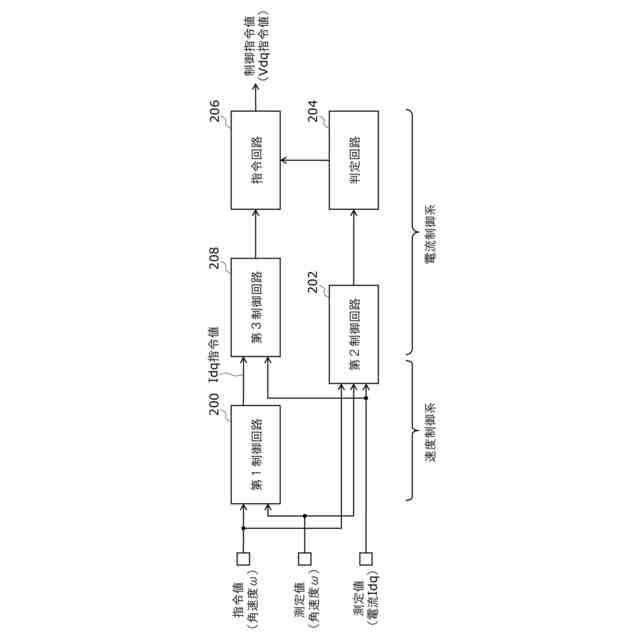
また、一実施形態によれば、モータ制御装置は、第 1 制御回路と、第 2 制御回路と、第 3 制御回路と、判定回路と、指令回路と、を疎アネル。第 1 制御回路は、角速度の指令値及び角速度の測定値から、ルールベースに基づいて速度制御に係る第 1 制御値を出力する。第 2 制御回路は、前記第 1 制御値及び電流の測定値から、学習済みモデルに基づいて電流制御に係る第 2 制御値を出力する。第 3 制御回路は、前記第 1 制御値及び前記電流の測定値から、ルールベースに基づいて電流制御に係る第 3 制御値を出力する。判定回路は、少なくとも前記第 2 制御値に基づいて、状態を判定する。指令回路は、前記判定回路が判定した結果に基づいて、前記第 2 制御値及び前記第 3 制御値から電流制御に係る制御指令値を取得して出力する。
【0008】
また、一実施形態によれば、モータ制御回路は、処理回路、を備える。処理回路は、指令値及び測定値を受信し、前記指令値及び前記測定値から、ルールベースに基づいた第 1 制御値を取得し、前記指令値及び前記測定値から、学習済みモデルに基づいた第 2 制御値を取得し、少なくとも前記第 2 制御値に基づいて、状態を判定し、判定した前記状態に基づいて、前記第 1 制御値及び前記第 2 制御値から制御指令信号を生成して出力する。
【図面の簡単な説明】
【0009】
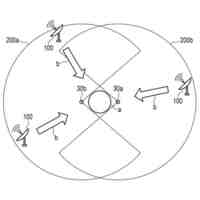
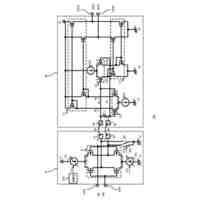
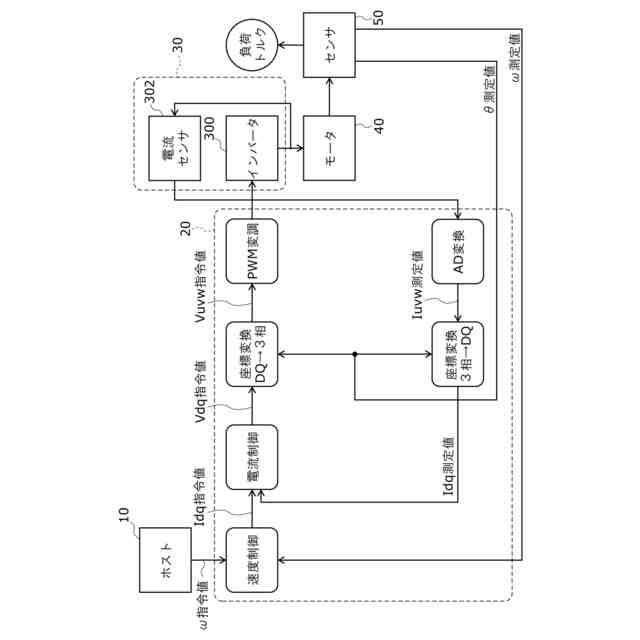
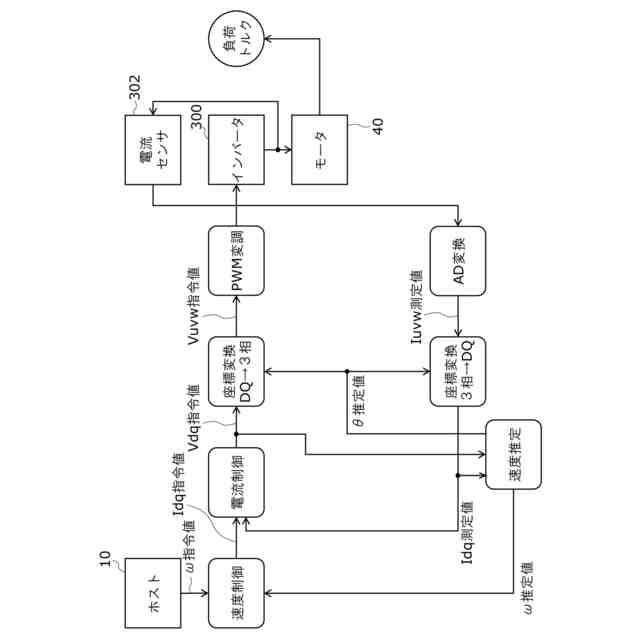
一実施形態に係るモータシステムの一例を模式的に示す図。
一実施形態に係るモータシステムの動作の概略を示す図。
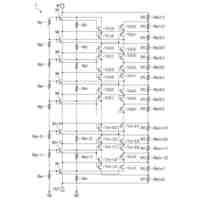
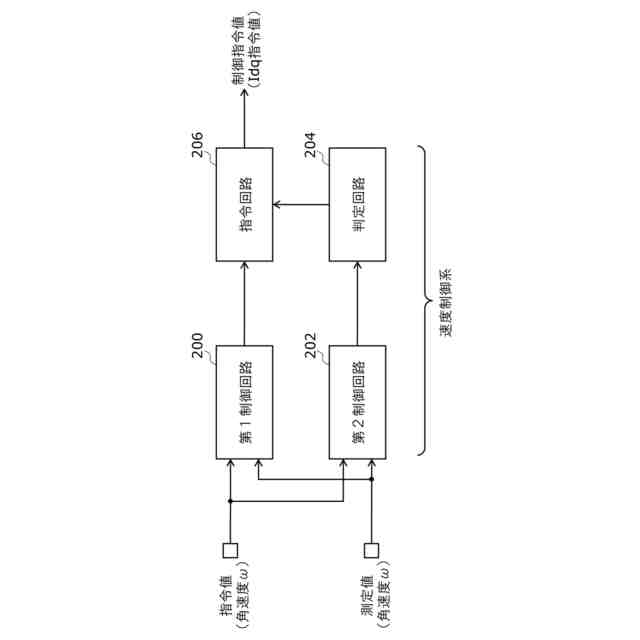
一実施形態に係る制御部の一部の一例を模式的に示す図。
一実施形態に係る制御部の一部の一例を模式的に示す図。
一実施形態に係る制御部の一部の一例を模式的に示す図。
一実施形態に係る制御部の一部の一例を模式的に示す図。
一実施形態に係るモータシステムの一例を模式的に示す図。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
電源回路
1か月前
株式会社東芝
発電設備
22日前
株式会社東芝
電子機器
1か月前
株式会社東芝
電解装置
1か月前
株式会社東芝
検査装置
28日前
株式会社東芝
電解装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
24日前
株式会社東芝
搬送ローラ
24日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
レーダ装置
14日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
信号伝送装置
1か月前
株式会社東芝
信号伝送装置
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
アイソレータ
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ