TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024042340
公報種別
公開特許公報(A)
公開日
2024-03-28
出願番号
2022146994
出願日
2022-09-15
発明の名称
作業車両の制御システム
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20240321BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自律走行作業車両が設定経路に沿って作業するときに、作業機の作用位置が開始位置に到達すると作業を自動で開始し、終了位置に到達すると自動で作業を終了させる作業車両の作業システムがある。しかし、単一の走行車体に複数の作業機を取り付ける場合に作業開始位置や作業終了位置を揃える技術は開示されていない。そこで、単一の走行車体に複数の作業機を取り付けて作業を行うときに、各作業機の作業開始位置や作業終了位置を合わせることができる作業車両の制御システムを提供する。
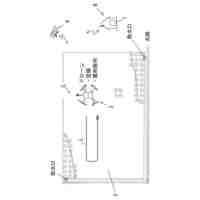
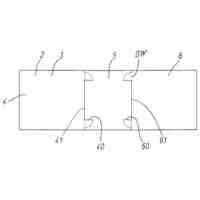
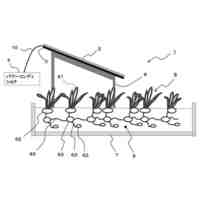
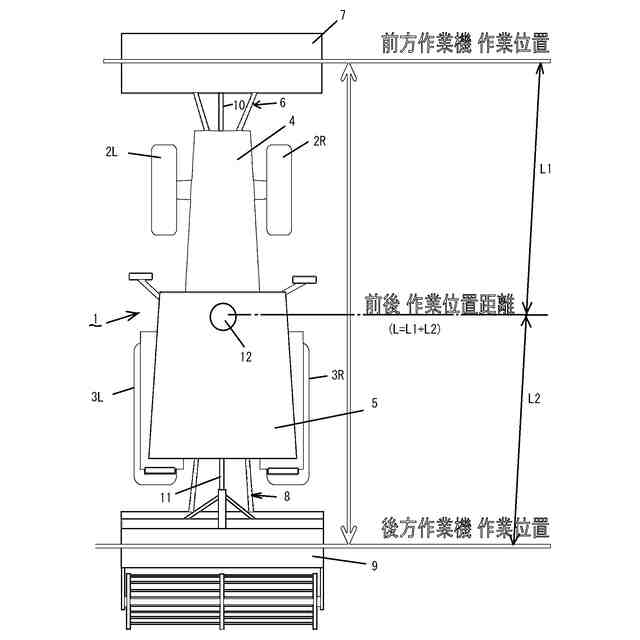
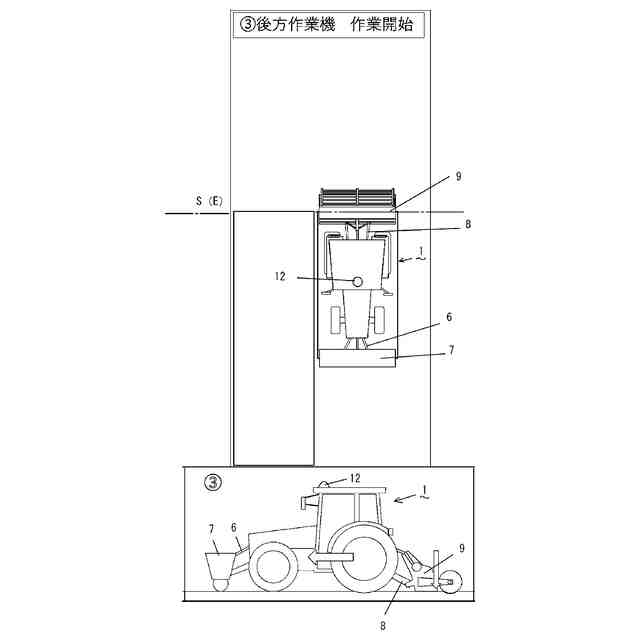
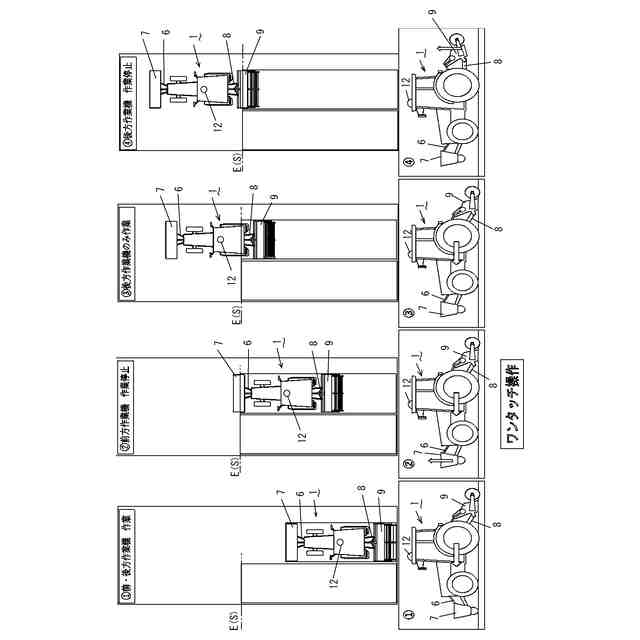
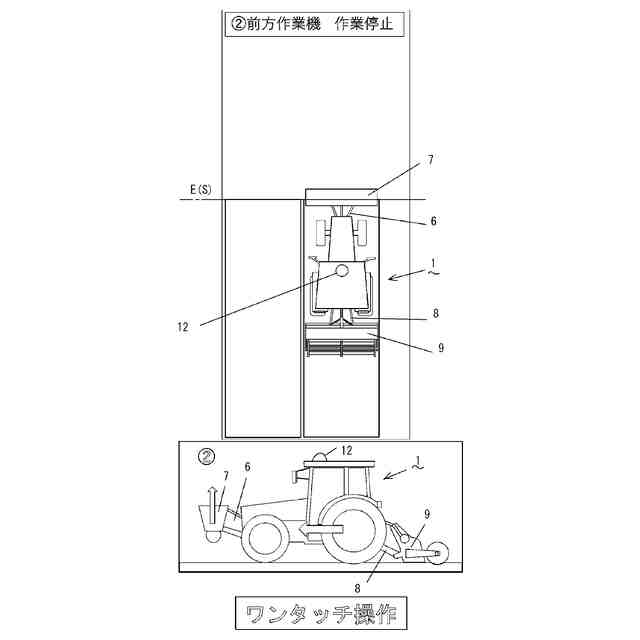
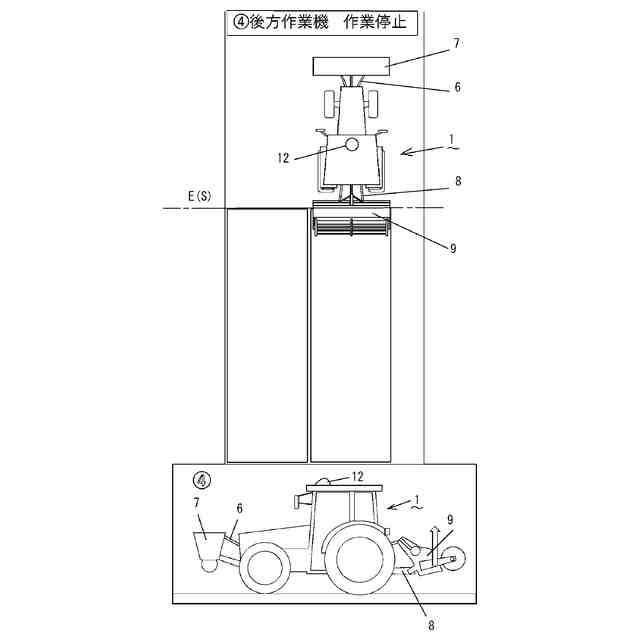
【解決手段】作業車両1の前後方向に離れた位置に第一作業機7と第二作業機9を装着し、第一作業機7と第二作業機9の作業機間距離を記憶する制御装置を設け、制御装置は第一作業機7による作業が開始された後に作業機間距離に相当する距離を走行したことを検出すると第二作業機9による作業を開始する。
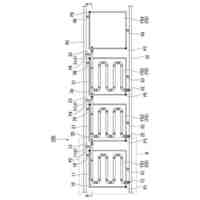
【選択図】図2
特許請求の範囲
【請求項1】
作業車両(1)の前後方向に離れた位置に第一作業機(7)と第二作業機(9)を装着し、第一作業機(7)と第二作業機(9)の作業機間距離(L)を記憶する制御装置を設け、制御装置は第一作業機(7)による作業が開始された後に作業機間距離(L)に相当する距離を走行したことを検出すると第二作業機(9)による作業を開始することを特徴とする作業車両の制御システム。
続きを表示(約 580 文字)
【請求項2】
制御装置は第一作業機(7)による作業が停止した後に作業機間距離(L)に相当する距離を走行したことを検出すると第二作業機(9)による作業を停止することを特徴とする請求項1記載の作業車両の制御システム。
【請求項3】
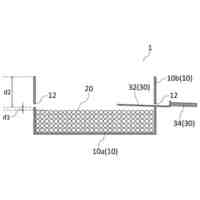
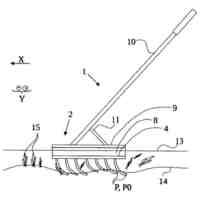
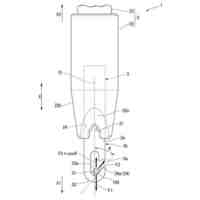
作業車両(1)の前後方向に離れた位置に第一作業機(7)と第二作業機(9)を装着し、作業車両(1)は制御装置と測位装置(12)を装備し、制御装置は測位装置(12)と第一作業機(7)の第一距離(L1)及び測位装置(12)と第二作業機(9)の第二距離(L2)を記憶し、第一作業機(7)が先に作業を開始すると測位装置(12)と第一距離(L1)の情報から第一作業機(7)の作業開始位置を記憶し、測位装置(12)と第二距離(L2)の情報から第二作業機(9)が第一作業機(7)の作業開始位置に到達すると第二作業機(9)の作業を開始させることを特徴とする作業車両の制御システム。
【請求項4】
第一作業機(7)が先に作業を停止すると測位装置(12)と第一距離(L1)の情報から第一作業機(7)の作業停止位置を記憶し、測位装置(12)と第二距離(L2)の情報から第二作業機(9)が第一作業機(7)の作業停止位置に到達すると第二作業機(9)の作業を停止させることを特徴とする請求項3記載の作業車両の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、農業用、土木用、建築用等の作業車両の制御システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
無人の自律走行作業車両が設定経路に沿って作業するときに、作業の終了および開始位置を同一の設定線上に設定し、作業機の作用位置が開始位置に到達すると作業を自動で開始し、終了位置に到達すると自動で作業を終了させることにより、枕地での旋回前の作業終了位置と旋回後の作業開始位置を揃える作業車両の無人作業システムがある(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2016-095660号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、単一の走行車体に複数の作業機を取り付ける場合に作業開始位置や作業終了位置を揃える技術は開示されていない。
【0005】
本発明では、単一の走行車体に複数の作業機を取り付けて作業を行うときに、各作業機の作業開始位置や作業終了位置を合わせることができる作業車両の制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
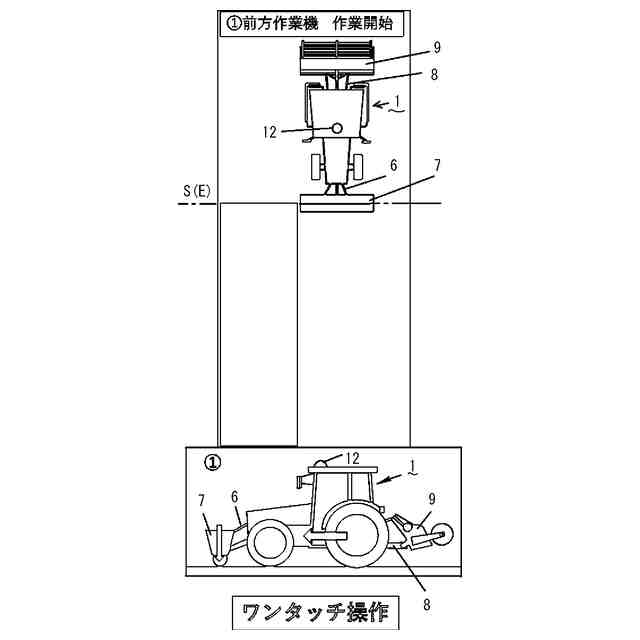
請求項1記載の発明は、作業車両1の前後方向に離れた位置に第一作業機7と第二作業機9を装着し、第一作業機7と第二作業機9の作業機間距離Lを記憶する制御装置を設け、制御装置は第一作業機7による作業が開始された後に作業機間距離Lに相当する距離を走行したことを検出すると第二作業機9による作業を開始する作業車両の制御システムである。
【0007】
請求項1記載の発明によれば、第一作業機7と第二作業機9を同じ位置で作業を開始させることができるため、作業ムラや資材のムダを抑制できる。
【0008】
請求項2記載の発明は、制御装置は第一作業機7による作業が停止した後に作業機間距離Lに相当する距離を走行したことを検出すると第二作業機9による作業を停止する請求項1記載の作業車両の制御システムである。
【0009】
請求項2記載の発明によれば、第一作業機7と第二作業機9を同じ位置で作業を停止させることができるため、作業ムラや資材のムダを抑制できる。
【0010】
請求項3記載の発明は、作業車両1の前後方向に離れた位置に第一作業機7と第二作業機9を装着し、作業車両1は制御装置と測位装置12を装備し、制御装置は測位装置12と第一作業機7の第一距離L1及び測位装置12と第二作業機9の第二距離L2を記憶し、第一作業機7が先に作業を開始すると測位装置12と第一距離L1の情報から第一作業機7の作業開始位置を記憶し、測位装置12と第二距離L2の情報から第二作業機9が第一作業機7の作業開始位置に到達すると第二作業機9の作業を開始させる作業車両の制御システムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
産卵床
4日前
個人
動物飼育用ケージ
11日前
個人
猫用のトイレ
11日前
個人
水中生物採集器
4日前
株式会社大垣化工
糸収容具
12日前
井関農機株式会社
苗移植機
11日前
井関農機株式会社
作業車両
11日前
株式会社大貴
動物用トイレ
4日前
みのる産業株式会社
作業台車
13日前
井関農機株式会社
乗用型苗植機
14日前
ロンタイ株式会社
植生体
11日前
井関農機株式会社
防除システム
18日前
MWPO株式会社
キャットタワー
4日前
個人
水田用除草機器および水田用除草体
12日前
株式会社クボタ
田植機
11日前
有限会社伊藤テクノリサーチ
防草施工方法
5日前
株式会社 ジークラック
ルアー
12日前
株式会社クボタ
降雨制御システム
12日前
アース製薬株式会社
線香
18日前
個人
豚舎、およびそれを利用した養豚方法
12日前
群馬県
太陽光発電環境システム
4日前
株式会社シマノ
釣針外し器
18日前
鹿島建設株式会社
藻場の造成装置
11日前
井関農機株式会社
複数作業車の連携制御システム
5日前
三菱マヒンドラ農機株式会社
管理システム
18日前
ウェトラブホールディング株式会社
魚釣り用疑似餌
13日前
アース製薬株式会社
薬剤揮散装置
18日前
戸田建設株式会社
除草装置
18日前
長煬科技有限公司
鉢植え用キット
11日前
個人
薬用クリサンセマムの育苗方法及び施肥方法
7日前
積水化学工業株式会社
配管システム
18日前
フマキラー株式会社
小動物捕獲器
6日前
個人
農業スマート種まきロボット装置
18日前
三菱マヒンドラ農機株式会社
ディスクハロー作業機
18日前
株式会社昭電
小動物侵入防止具
18日前
株式会社昭電
小動物侵入防止具
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ