TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024040141
公報種別
公開特許公報(A)
公開日
2024-03-25
出願番号
2023147589
出願日
2023-09-12
発明の名称
ロボットステージングエリア管理
出願人
横河電機株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240315BHJP(制御;調整)
要約
【課題】運転ミッションを完了するために必要なときに有能なロボットが利用可能であるようにロボットのフリート編成方法を提供する。
【解決手段】ロボットステージングエリア内の移動ロボットを管理するための様々な実装形態において、生産モードからステージングモードに移行する移動ロボットの状態が決定され得る。複数のロボットステージングステーションの状態も決定され得る。複数のロボットステージングステーションは、充電ステーションおよびメンテナンスステーションを少なくとも1つずつ含み得る。移動ロボットおよび複数のロボットステージングステーションの決定された状態に少なくとも部分的に基づいて、複数のロボットステージングステーションからロボットステージングステーションが選択され得る。移動ロボットには、ステージングミッションが割り当てられ得、移動ロボットに、選択されたロボットステージングステーションまで走行させ得る。
【選択図】図17
特許請求の範囲
【請求項1】
1つまたは複数のプロセッサを使用して実装される方法であって、
生産モードからステージングモードに移行する移動ロボットの状態を決定するステップと、
複数のロボットステージングステーションの状態を決定するステップであって、前記複数のロボットステージングステーションは、充電ステーションおよびメンテナンスステーションを少なくとも1つずつ含む、ステップと、
前記移動ロボットおよび複数のロボットステージングステーションの前記決定された状態に少なくとも部分的に基づいて、前記複数のロボットステージングステーションからロボットステージングステーションを選択するステップと、
前記移動ロボットにステージングミッションを割り当てるステップであって、前記ステージングミッションは、前記移動ロボットに前記選択されたロボットステージングステーションまで走行させる、ステップと
を含む、方法。
続きを表示(約 1,400 文字)
【請求項2】
前記選択されたロボットステージングステーションにおける出力デバイスに、フィデューシャル出力をレンダリングさせるステップをさらに含み、前記ステージングミッションは、前記移動ロボットに、
前記複数のロボットステージングステーションをスキャンして、前記レンダリングされたフィデューシャル出力を検出させ、
前記レンダリングされたフィデューシャル出力が検出された前記ロボットステージングステーションまで走行させる、請求項1に記載の方法。
【請求項3】
前記出力デバイスは、ディスプレイを含み、前記レンダリングされたフィデューシャル出力は、視覚的フィデューシャルマーカーを含む、請求項2に記載の方法。
【請求項4】
前記移動ロボットは、産業施設の生産エリアから、前記複数のロボットステージングステーションのうちの少なくともいくつかを含む前記産業施設のロボットステージングエリアに移動するときに、前記生産モードから前記ステージングモードに移行する、請求項1に記載の方法。
【請求項5】
前記方法は、
前記移動ロボットによって実行可能である、または前記移動ロボットに割り当てられる、または前記複数のロボットステージングステーションを含むロボットステージングエリア内の1つもしくは複数の他の移動ロボットに割り当て可能である、1つまたは複数の生産ミッションの状態を決定するステップ
をさらに含み、
前記選択するステップは、1つまたは複数の前記生産ミッションの前記状態にさらに基づく、請求項4に記載の方法。
【請求項6】
前記生産ミッションのうちの1つまたは複数は、前記ロボットステージングエリアの外のプロセスオートメーションコンポーネントのセンサーまたはアクチュエータを検査または整備する1つもしくは複数のミッションを含む、請求項5に記載の方法。
【請求項7】
前記選択されたロボットステージングステーションは、前記移動ロボットによって実行可能である、または前記移動ロボットに割り当てられた、前記生産ミッションのうちの利用可能な開始配置であることに基づいて選択される、請求項5に記載の方法。
【請求項8】
前記選択するステップは、前記生産ミッションのうちの1つの生産ミッションの開始時刻までの時間間隔を閾値と比較するステップを含む、請求項5に記載の方法。
【請求項9】
前記移動ロボットは、第1の移動ロボットを含み、前記選択するステップは、第2の移動ロボットによって実行される、または実行されることになる、複数の前記生産ミッションのうちの第2の生産ミッションに応じて、複数の前記生産ミッションのうちの第1の生産ミッションが条件付きで前記第1の移動ロボットによって実行されるという決定にさらに基づいて、前記ロボットステージングステーションを選択するステップを含む、請求項5に記載の方法。
【請求項10】
前記第2の生産ミッションは、プロセスオートメーション施設のコンポーネントの検査を含み、前記第1の生産ミッションは、前記コンポーネントの前記検査の結果に基づいて条件付きで実行される1つまたは複数のタスクを含む、請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、ロボットステージングエリア管理に関する。
続きを表示(約 3,800 文字)
【背景技術】
【0002】
石油化学精製所、化学プラントなどの、複合産業施設は、定期検査および/またはメンテナンスを必要とする無数のコンポーネントを含み得る。これらのタスクは、伝統的に人間によって行われてきたが、冗長で、反復的であり、間違いを起こしやすく、危険でさえある。たとえば、多くのプロセスオートメーション施設は、防爆(「ex-proof」)エリアなど、人員へのリスクおよび/または事故のリスクが高まるエリアを含む。これらの検査およびメンテナンスタスクの多くは、地上ロボットおよび無人航空機(UAV)を含む、ロボットに任せることが次第に多くなってきている。しかしながら、ロボットへの依存がこのように高まると、ロボットの任務の中断を最小限に抑えつつ、ロボットのフリートを効率的かつ効果的に正常に運転できる状態にどのように保つかなど、様々な課題も導入される。
【0003】
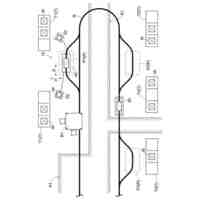
たとえば、充電ステーションおよびロボットの1対1対応を実装することによってプロセスオートメーション施設のすべてのロボットを十分に充電しておくことが可能な場合があり、したがって各ロボットはいつでも関連付けられた充電ステーションに行ってバッテリを充電することができる。しかしながら、この結果、多くの充電ステーションがかなりの時間未使用のままであり、不必要にリソースを浪費し、スペースを無駄にする可能性がある。同様に、ロボットフリートによって完了されるべきタスクに適した能力レベルを考慮しなければ、電力などのリソースはロボットのフリート全体を最高レベルの能力で維持するために消費される可能性がある。さらに、多くの生産ミッションは、ロボットが生産ミッションを開始するまたは完了する専用の開始点または終了点を有するであろうことが考えられる。フリート内の各ロボットの位置を効率的に編成しないと、保管要件が過度に高くなり、ロボット経路に詰まりが生じ得る。さらに、ロボットステージングエリア(robot staging area)(「ロボットヤード(robot yard)」とも称される)内では、ロボットは、プロセスオートメーション施設の運転エリア内に比べて多くのロボットに遭遇する可能性が高く、追加の課題が生じる。
【先行技術文献】
【非特許文献】
【0004】
「Enterprise-Control System Integration」のためのISA-95標準(https://www.isa.org/standards-and-publications/isa-standards/isa-standards-committees/isa95)
【発明の概要】
【発明が解決しようとする課題】
【0005】
消費されるリソースおよび他のロボットへの妨害を最小限度に抑えながら、運転ミッションを完了するために必要なときに有能なロボットが利用可能であるようにロボットのフリートを編成する必要がある。加えて、ロボットのフリートの管理を施設の管理と統合して、ロボットの誘導が効率的に実行されるようにし、施設内のロボットおよび/またはステーションの数を制限する必要がある。さらに、ほとんどのリソースをすべてのロボットに単純に適用することなく、施設を稼動させ続けるためにどのようなリソースが必要かを決定する管理システムが必要である。
【0006】
たとえば、ロボットの充電レベルがプリセットされた閾値を下回ったときにバッテリを充電する代わりに、本明細書において説明されている技術は、予想される需要および他のロボットの予想される利用可能性に基づいて、産業施設におけるタスクの完了に必要なバッテリレベルを決定し、ロボットがタスクを完了する必要があるとき、または充電に関連付けられるコストが削減されるときなどにおいて、全体的効率を促進する方式でロボットを充電することを可能にする。別の例として、移動ロボットが何らかの静的性能ベンチマークに不合格になったときに移動ロボットをいつでも修理する代わりに、本明細書において説明されている実装形態では、予想されるタスクおよび他のロボットの予想される利用可能性に基づいて、故障または性能不足を予測するアセット監視戦略を適用し、ロボットは、必要な場合に修理/メンテナンスロボットステージングステーションに送られるものとしてよい。さらに別の例として、ロボットを移動して他のロボットの行く手を開けるときに、本明細書において説明されている技術は、特定のロボットを生産ミッションについて優先順位付けされた位置に移動する。
【課題を解決するための手段】
【0007】
様々な実装形態において、「ロボットステージングエリア」または「ロボットヤード」が宣言されるかまたは他の何らかの形で定義され得る。ロボットステージングエリアは、移動ロボットが、生産ミッションを実行していない間保管される産業施設の一エリアである。ロボットステージングエリアは、移動ロボットに異なるサービスを提供するために複数の異なるタイプのロボットステージングステーションを備え得る。これらのサービスは、限定はしないが、充電、修理/メンテナンス、ファームウェアおよびソフトウェアの更新、ペイロード変更(たとえば、「リツーリング」)、保管、生産ミッション開始点ステーションなどを含み得る。
【0008】
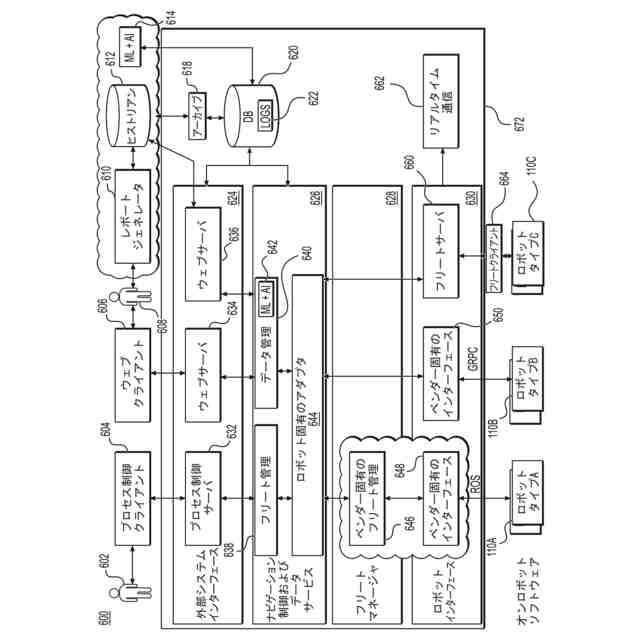
様々な実装形態において、ロボティクス管理システム(robotics management system)は、ロボティクスステージングシステム(robotics staging system)を含むか、またはロボティクスステージングシステムと動作可能に結合され得る。ロボティクス管理システムは、施設のニーズ、スケジュール、人間の要求などに基づいて、産業施設内で様々な生産ミッションを実行する移動ロボットのフリートを管理するように構成され得る。これらの生産ミッションは、たとえば、センサーおよび/もしくはアクチュエータを検査しおよび/または修理すること、妨害物を取り除くこと、産業施設の他の側面を検査すること(たとえば、煙突火炎を監視すること)、様々なメンテナンスもしくは清掃タスクを実行すること、または産業施設の生産エリア内で移動ロボットによって実行され得る任意の他のタスクを含み得る。
【0009】
対照的に、ロボティクスステージングシステムは、ロボットステージングエリア内のロボットフリートを管理し、効率的および効果的な充電、修理、メンテナンス、保管を確実にし、さらにはロボットステージングエリアのスペースおよびロボットステージングステーションを最も効率的に使用するように構成され得る。様々な実装形態において、ロボットが生産モードからステージングモードに移行するときに、たとえば、生産エリア内で生産ミッションを完了した後にロボットステージングエリアに入ることによって、ロボティクス管理システムは、ロボティクスステージングシステムへの制御のハンドオーバーを実行し得る。様々な実装形態において、このハンドオーバーは、入ってくるロボットの現在の状態を識別するための診断検査を含み得る。この診断検査から少しずつ集められた情報に基づいて、ロボティクス管理システムおよび/またはロボティクスステージングシステムは、将来のミッションに備えてロボットを準備するためにとるべきアクションを識別し得る。
【0010】
いくつかの実装形態において、ロボティクスステージングシステムは、ロボティクス管理システムからのロボットそれ自体に関する情報(たとえば、バッテリ寿命、配置、様々なロボットの健全性特性)および(2)ロボットが割り当てられ得るミッションを取り出し得る。この取り出された情報に基づいて、ロボティクスステージングシステムはロボットステージングエリア内のロボットを管理し得る。ロボットステージングエリア内のロボットのロボティクスステージングシステムによる管理は、たとえば、ロボットが充電を必要としているかどうかを、もしそうならば、ロボットは充電ロボットステージングステーションに移動する必要があるかどうかを決定すること、ロボットがメンテナンスを受ける必要があるかどうか(ロボットが将来メンテナンスを必要とするかどうか、および/またはいつメンテナンスを必要とするかを予測することを含む)、およびもしそうならば、ロボットはメンテナンスロボットステージングステーションに移動する必要があるかどうかを決定すること、ロボットが生産ミッションを開始する必要があるかどうか、もしそうであれば、どのロボットステージングステーションが生産ミッションに対して好適な開始配置であるかを決定すること、ロボットが少なくとも特定の期間にわたって任意のミッションまたは他の活動に必要でないかどうか、もしそうであれば、ロボットは保管ロボットステージングステーションに移動するべきかどうかを決定すること、および/またはある配置へ移動する必要のあるロボットの行く手を塞いでいる他のロボットがあるかどうかを決定することを含み得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
4日前
アズビル株式会社
流量制御装置
1か月前
株式会社エクセディ
作業ロボット
17日前
ミネベアミツミ株式会社
入力装置
29日前
アズビル株式会社
流量制御システム
今日
トヨタ自動車株式会社
自動走行搬送車
1か月前
オムロン株式会社
開発装置、開発方法
2日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
株式会社ダイフク
搬送設備
7日前
三菱電機株式会社
移動体制御装置
16日前
株式会社クボタ
故障診断装置
1か月前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
制御装置
1か月前
リックス株式会社
状態検出装置
1か月前
株式会社ダイフク
物品搬送設備
4日前
岩田工機株式会社
加工装置
16日前
村田機械株式会社
搬送車システム
22日前
株式会社デンソー
過電流検出回路
3日前
株式会社GSユアサ
電力変換装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
10日前
THK株式会社
編集装置及び編集方法
1か月前
日本精工株式会社
制御システムおよび制御方法
10日前
日本精工株式会社
制御システムおよび制御方法
10日前
日本精工株式会社
制御システムおよび制御方法
10日前
日本精工株式会社
制御システムおよび制御方法
10日前
東洋電装株式会社
移動検出装置および鞍乗車両
1か月前
村田機械株式会社
走行車システム
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社デンソー
ペダル装置
1か月前
株式会社ダイフク
無人航空機の搬送システム
1か月前
多摩川精機株式会社
突入電流防止回路
22日前
シャープ株式会社
走行システム及び走行方法
2日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ