TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024034358
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022138546
出願日
2022-08-31
発明の名称
車両
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G01S
17/87 20200101AFI20240306BHJP(測定;試験)
要約
【課題】表現角が狭くなることを抑制すること。
【解決手段】車両は、第1センサと、第2センサと、制御装置と、を備える。第1センサは、物体の表面の一部を表す第1検出点の二次元の座標系での位置を検出する。第2センサは、物体の表面の一部を表す第2検出点の二次元の座標系での位置を検出する。制御装置は、第1センサの検出結果と第2センサの検出結果とに基づいて、仮想センサを原点とする二次元の座標系での仮想検出点の位置を導出する。制御装置は、第1センサの検出結果と第2センサの検出結果とに基づいて、仮想センサを基準位置から物体に近付くように移動させる。
【選択図】図5
特許請求の範囲
【請求項1】
物体の表面の一部を表す第1検出点の二次元の座標系での位置を検出する第1センサと、
前記物体の表面の一部を表す第2検出点の二次元の座標系での位置を検出する第2センサと、
制御装置と、を備え、
前記制御装置は、
前記第1センサの検出結果と前記第2センサの検出結果とに基づいて、仮想センサを原点とする二次元の座標系での仮想検出点の位置を導出し、
前記第1センサの検出結果と前記第2センサの検出結果とに基づいて、基準位置から前記物体に近付くように前記仮想センサを移動させる、車両。
続きを表示(約 300 文字)
【請求項2】
前記制御装置は、前記第1センサと前記第2センサを結ぶ仮想的な線分上で前記仮想センサを移動させる、請求項1に記載の車両。
【請求項3】
前記制御装置は、
前記第1センサが1周期で検出する複数の前記第1検出点までの距離の平均値である第1平均値を算出し、
前記第2センサが1周期で検出する複数の前記第2検出点までの距離の平均値である第2平均値を算出し、
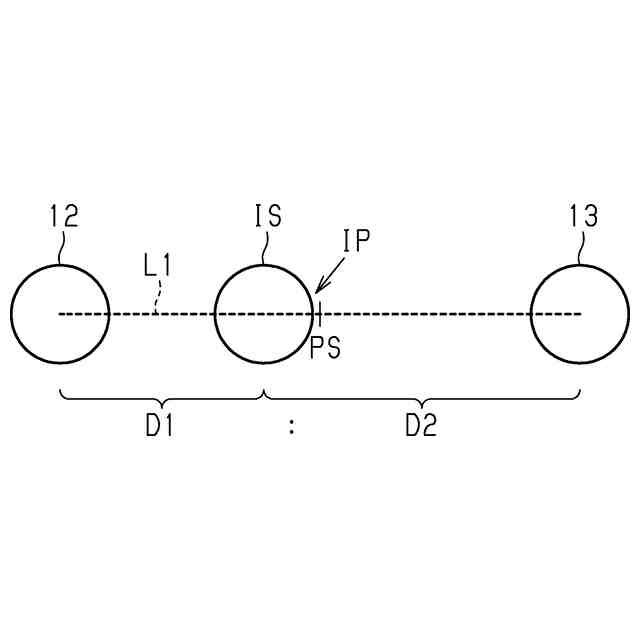
前記第1センサから前記仮想センサまでの距離と前記第2センサから前記仮想センサまでの距離との比が、前記第1平均値と前記第2平均値との比に一致するように前記仮想センサを移動させる、請求項2に記載の車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に開示の車両は、複数のセンサと、制御装置と、を備える。制御装置は、複数のセンサの検出結果を組み合わせることで新たな情報を得る。これにより、制御装置は、外部状況を認識する。
【先行技術文献】
【特許文献】
【0003】
特開2022-24493号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両は、検出点の二次元の座標系での位置を検出するセンサを複数備える場合がある。このセンサの検出結果を組み合わせることで新たな情報を得る場合、制御装置は、複数のセンサの検出結果から、仮想センサを原点とする二次元の座標系での仮想検出点の位置を導出する。この場合、センサの位置と仮想センサの位置との差に起因して、センサを原点として物体を表現する表現角よりも仮想センサを原点として物体を表現する表現角が狭くなるおそれがある。
【課題を解決するための手段】
【0005】
上記課題を解決する車両は、物体の表面の一部を表す第1検出点の二次元の座標系での位置を検出する第1センサと、前記物体の表面の一部を表す第2検出点の二次元の座標系での位置を検出する第2センサと、制御装置と、を備え、前記制御装置は、前記第1センサの検出結果と前記第2センサの検出結果とに基づいて、仮想センサを原点とする二次元の座標系での仮想検出点の位置を導出し、前記第1センサの検出結果と前記第2センサの検出結果とに基づいて、基準位置から前記物体に近付くように前記仮想センサを移動させる。
【0006】
制御装置は、物体に近付くように仮想センサの位置を移動させる。仮想センサの位置を一定にする場合、物体と仮想センサとの位置関係によっては、仮想センサを原点として物体を表現する表現角が狭くなるおそれがある。物体に近付くように仮想センサの位置を移動させることで、表現角が狭くなることを抑制できる。
【0007】
上記車両について、前記制御装置は、前記第1センサと前記第2センサを結ぶ仮想的な線分上で前記仮想センサを移動させてもよい。
上記車両について、前記制御装置は、前記第1センサが1周期で検出する複数の前記第1検出点までの距離の平均値である第1平均値を算出し、前記第2センサが1周期で検出する複数の前記第2検出点までの距離の平均値である第2平均値を算出し、前記第1センサから前記仮想センサまでの距離と前記第2センサから前記仮想センサまでの距離との比が、前記第1平均値と前記第2平均値との比に一致するように前記仮想センサを移動させてもよい。
【発明の効果】
【0008】
本発明によれば、表現角が狭くなることを抑制できる。
【図面の簡単な説明】
【0009】
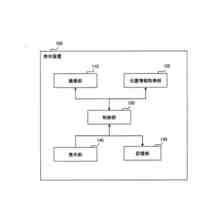
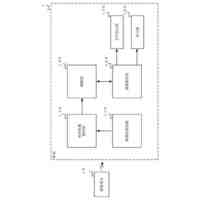
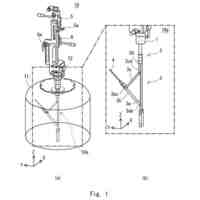
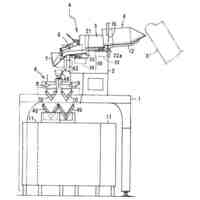
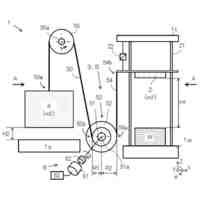
車両の概略構成図である。
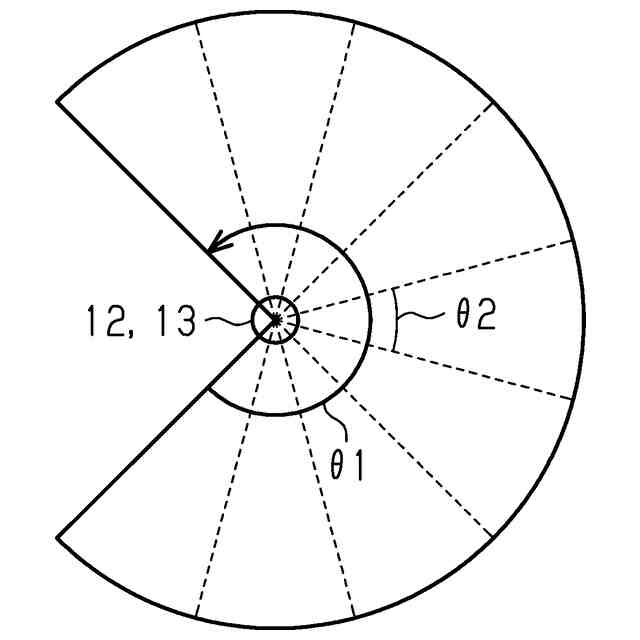
図1の車両が備えるセンサの視野角、及び角度分解能を示す図である。
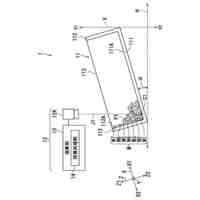
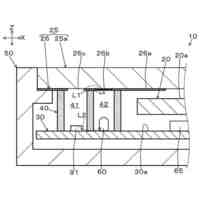
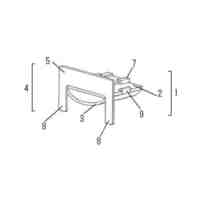
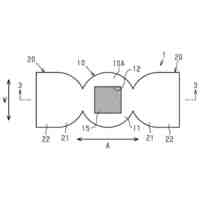
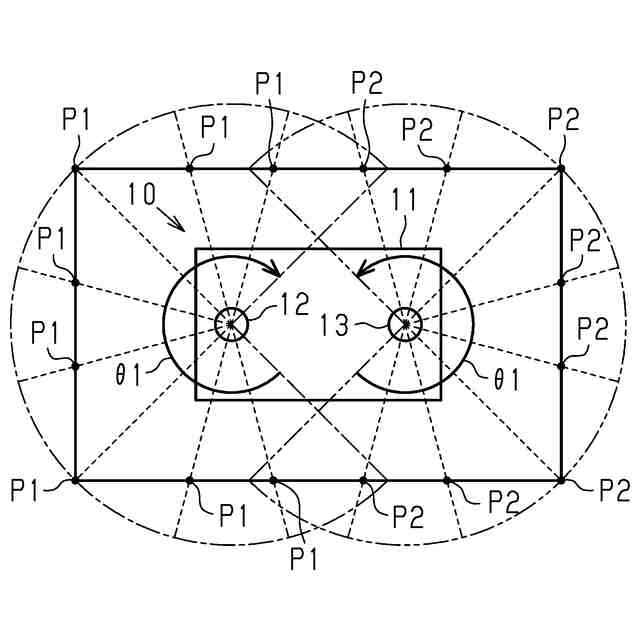
図1の車両が備えるセンサの位置を示す図である。
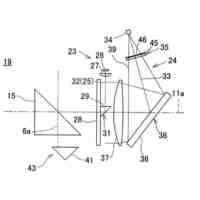
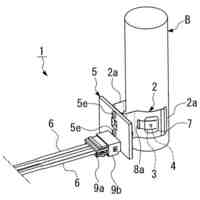
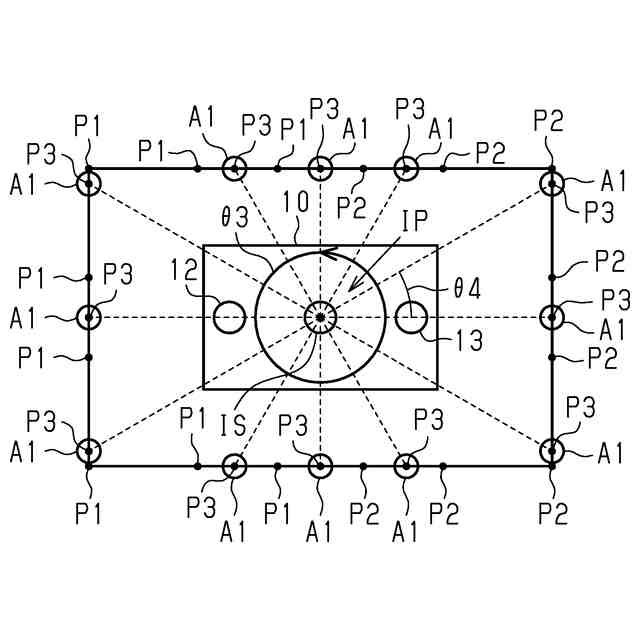
図1の制御装置によって生成される仮想センサを模式的に示す図である。
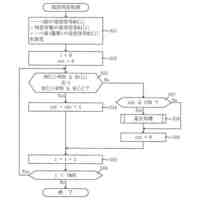
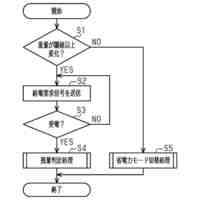
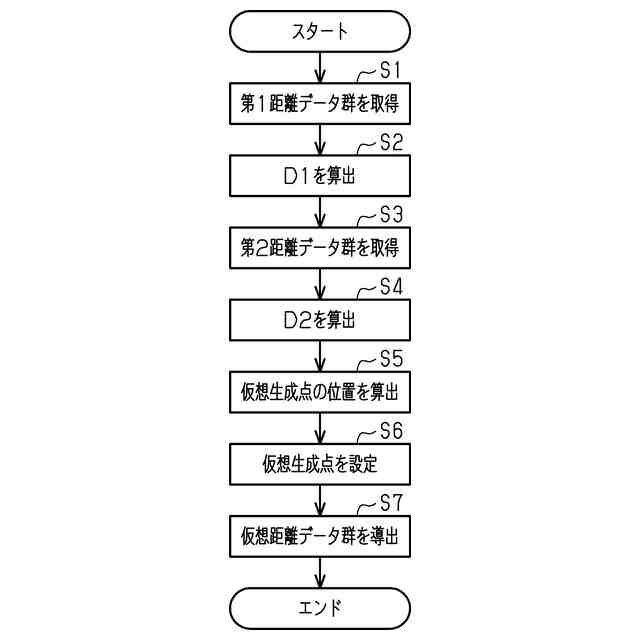
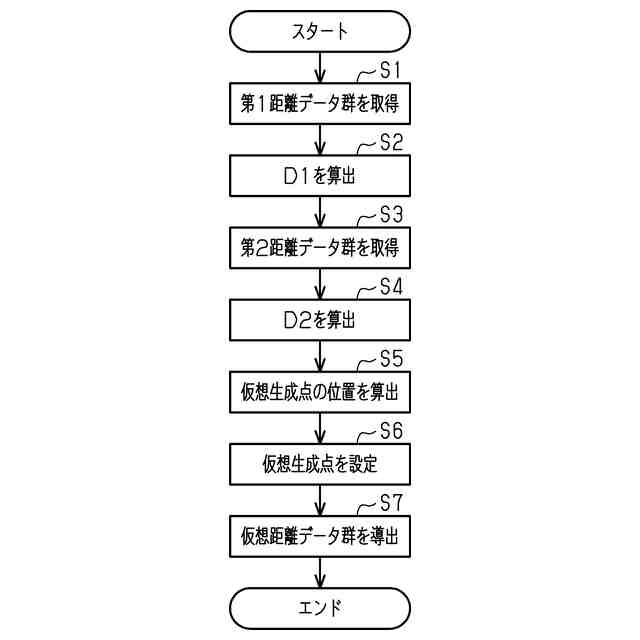
図1の制御装置が行う制御を示すフローチャートである。
図5のフローチャートで制御装置が仮想生成点の位置を算出する際の制御について説明するための図である。
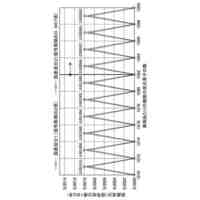
車両の移動に伴う仮想センサの位置の遷移を示す図である。
表現角について説明するための図である。
【発明を実施するための形態】
【0010】
車両の一実施形態について説明する。
<車両>
図1に示すように、車両10は、車体11と、第1センサ12と、第2センサ13と、制御装置14と、を備える。本実施形態の車両10は、自律移動を行うように構成されている。車両10は、生成した経路に沿って移動するものであってもよい。車両10は、予め定められた追尾対象を追尾するものであってもよい。車両10は、例えば、産業車両、搬送車、又は乗用車である。産業車両は、フォークリフト及びトーイングトラクタを含む。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
健康状態検査材
14日前
株式会社CCT
表示装置
13日前
ニデック株式会社
検出装置
20日前
株式会社トプコン
測定装置
20日前
日本精機株式会社
センサユニット
5日前
日本精機株式会社
車両用表示装置
20日前
株式会社SUBARU
車両
21日前
株式会社チノー
放射温度計
6日前
株式会社トプコン
測量装置
19日前
株式会社トプコン
測量装置
19日前
株式会社SUBARU
車両
21日前
個人
コンベックスルール用測定部品
12日前
トヨタ自動車株式会社
給水治具
11日前
株式会社XMAT
点検システム
21日前
本多電子株式会社
水中探知装置
20日前
大和製衡株式会社
組合せ計量装置
4日前
大和製衡株式会社
組合せ計量装置
4日前
東将精工株式会社
測定器具補助具
13日前
大和製衡株式会社
組合せ計量装置
4日前
中部電力株式会社
スミヤ濾紙
19日前
東レエンジニアリング株式会社
衝撃試験機
14日前
三菱マテリアル株式会社
温度センサ
11日前
株式会社ミツトヨ
光学式エンコーダ
14日前
東レ株式会社
センサー素子及びガスセンサー
18日前
豊田合成株式会社
重量測定装置
11日前
住友金属鉱山株式会社
検査装置
4日前
株式会社 システムスクエア
検査装置
13日前
株式会社ティアンドデイ
温度測定装置
11日前
ニシム電子工業株式会社
液位検出装置
5日前
トヨタ自動車株式会社
表示装置
5日前
古野電気株式会社
魚種識別システム及び方法
26日前
日立建機株式会社
作業機械
18日前
住友金属鉱山株式会社
セレン評価方法
4日前
笹田磁気計測研究所株式会社
磁気傾度計
6日前
株式会社不二越
歯車寸法測定装置
13日前
株式会社ダイナックス
電流検出器
4日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ