TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025177593
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084575
出願日
2024-05-24
発明の名称
制御装置及び制御方法
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/123 20060101AFI20251128BHJP(信号)
要約
【課題】 自動運転システムにより走行中の車両における異常の発生により自律走行が困難な場合にも、可能な限り該車両による目的地へのユーザの安全な輸送を継続し、ユーザの負担を軽減してモビリティサービスの利便性の維持を図る。
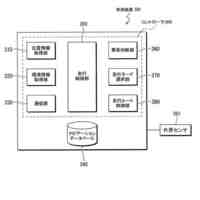
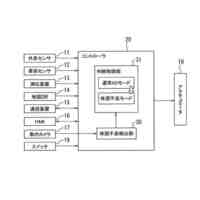
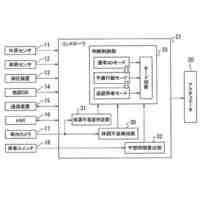
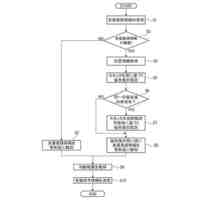
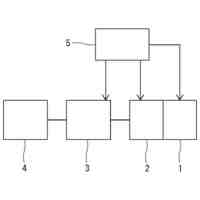
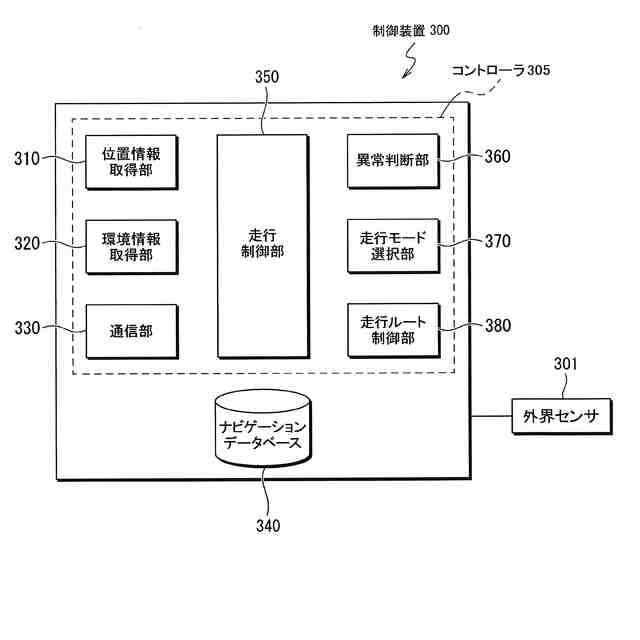
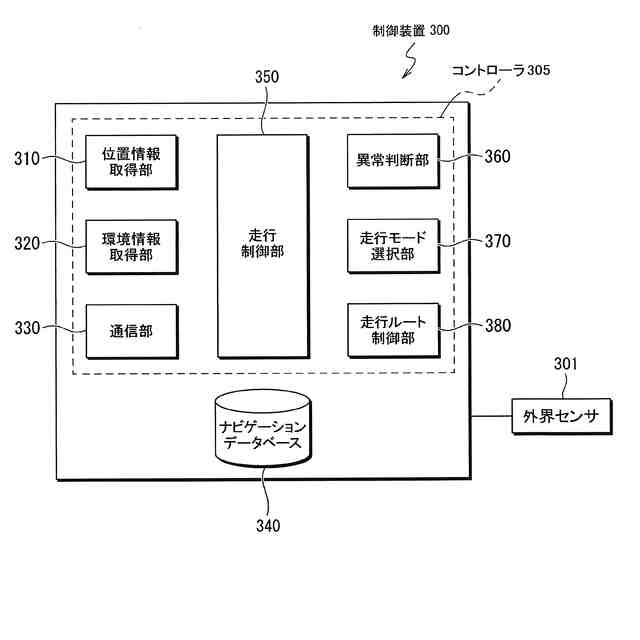
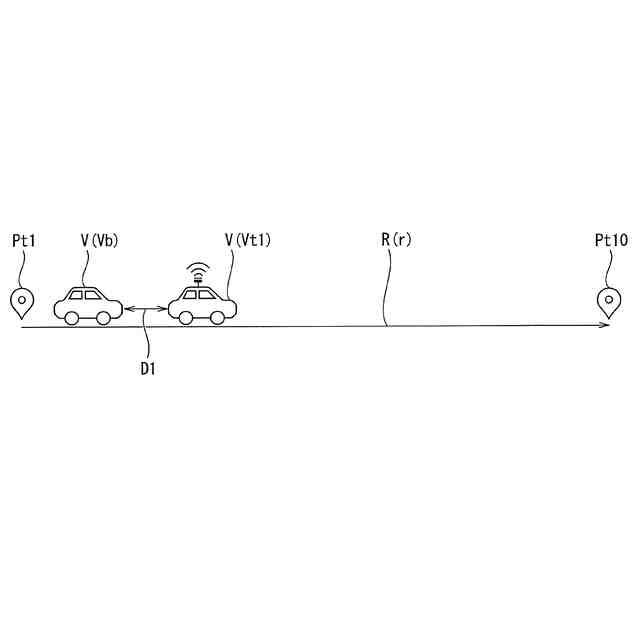
【解決手段】 制御装置300は、車両Vの自律走行を制御する処理と、車両Vに異常が発生したと判断した場合に実行可能な走行モードを特定する処理と、該走行モードを車両Vに乗車中のユーザの端末装置20に送信し、ユーザが承諾した一の走行モードに応じて故障車両Vbの走行を制御する処理と、を実行するコントローラ305を備え、コントローラ305は、故障車両Vbの自律走行が困難と判断した場合に他の車両Vが故障車両Vbを電子牽引する牽引モードを特定可能であり、走行モードとして牽引モードが特定された場合に故障車両Vbが電子牽引で目的地まで走行する牽引ルート及び牽引車両を決定する。
【選択図】 図3
特許請求の範囲
【請求項1】
自律走行及び追従走行が可能な車両の走行を制御する制御装置であって、
走行ルートに従って目的地まで車両の自律走行を制御する処理と、
車両に異常が発生したか否かを判断する処理と、
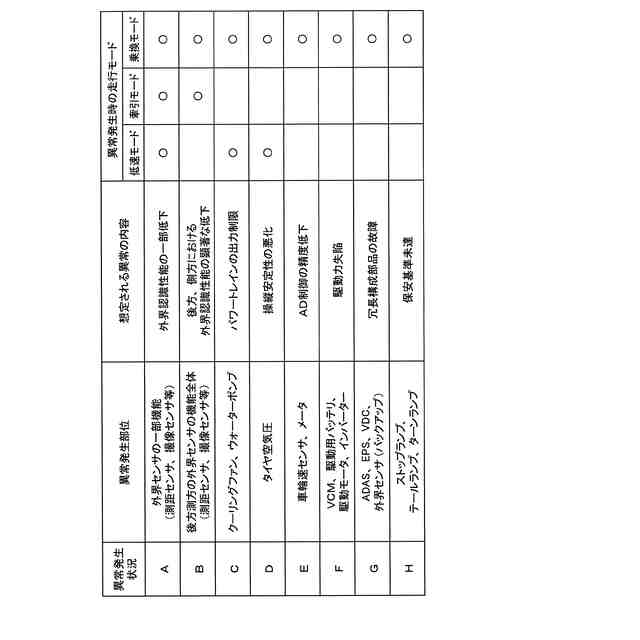
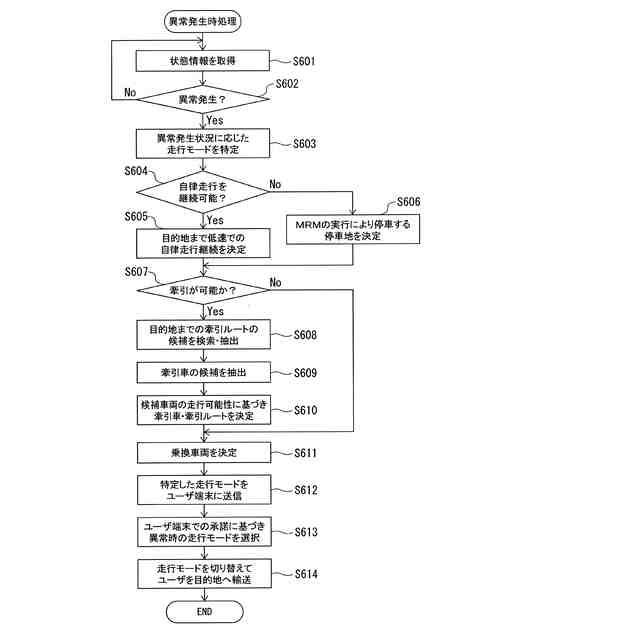
車両に異常が発生したと判断される場合に、前記異常の発生部位に基づいて実行可能な一以上の走行モードを特定する処理と、
特定された前記走行モードを前記異常が発生した車両である故障車両に乗車中のユーザの端末装置に送信し、ユーザが前記端末装置の操作により承諾した一の該走行モードに応じて前記故障車両の走行を制御する処理と、を実行するコントローラを備え、
前記コントローラは、
前記異常の発生部位に基づいて前記故障車両の前記自律走行が困難と判断した場合に、先行する他の車両が牽引車両として前記故障車両を電子牽引する牽引モードを前記走行モードとして特定可能であり、
前記走行モードとして前記牽引モードが特定された場合に、前記故障車両が前記電子牽引で前記目的地まで走行する牽引ルート及び前記牽引車両を決定する、制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記コントローラは、
前記牽引モードに応じて前記故障車両の走行を制御する場合に、リスク最小化制御により、前記電子牽引の開始前において前記故障車両を所定の停車地に停車させる、
請求項1に記載の制御装置。
【請求項3】
前記コントローラは、
前記走行モードとして前記牽引モードが特定された場合に、
前記リスク最小化制御により前記故障車両を停車させる前記停車地、および前記目的地として、前記故障車両及び一の前記牽引車両が停車可能な領域を設定する、
請求項2に記載の制御装置。
【請求項4】
前記コントローラは、
前記牽引ルートの候補として、前記停車地から前記目的地までの一以上の走行ルートを抽出し、
前記候補として抽出されたルートを経由する一以上の前記他の車両から前記牽引車両を決定する、請求項2に記載の制御装置。
【請求項5】
前記コントローラは、
前記牽引ルートの候補を経由する一以上の前記他の車両のうち、前記停車地を経由する車両を前記牽引車両として決定する、請求項4に記載の制御装置。
【請求項6】
前記コントローラは、
前記牽引ルートの候補のうち、前記牽引車両による走行見込みが最も高いルートを前記牽引ルートとして決定する、
請求項5に記載の制御装置。
【請求項7】
前記コントローラは、
前記牽引車両として複数の前記他の車両を決定可能であり、
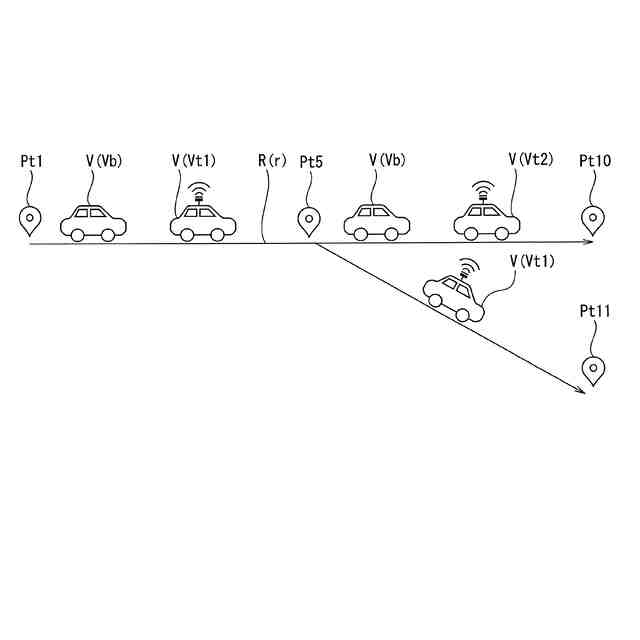
複数の前記牽引車両を決定した場合に、前記牽引ルート上に前記電子牽引の引継ぎを行う中継地を設定する、請求項5に記載の制御装置。
【請求項8】
前記コントローラは、
前記牽引モードによる前記走行の制御を行う場合に、ドライバが運転する有人運転車において想定される前方車両との車間距離に比べて、前記牽引車両と前記故障車両との車間距離の設定値を小さく設定する、請求項1に記載の制御装置。
【請求項9】
車両の自律走行を制御する制御装置により実行される制御方法であって、
走行ルートに従って目的地まで車両の自律走行を制御する処理と、
車両に異常が発生したか否かを判断する処理と、
車両に異常が発生したと判断される場合に、前記異常の発生部位に基づいて実行可能な一以上の走行モードを特定する処理と、
特定された前記走行モードを前記異常が発生した車両である故障車両に乗車中のユーザの端末装置に送信し、ユーザが前記端末装置の操作により承諾した一の該走行モードに応じて前記故障車両の走行を制御する処理と、をコントローラに実行させ、
前記コントローラは、
前記故障車両の前記自律走行が困難と判断した場合に、先行する他の車両が牽引車両として前記故障車両を電子牽引する牽引走行モードを前記走行モードとして特定可能であり、
前記走行モードとして前記牽引走行モードが特定された場合に、前記故障車両が前記電子牽引で前記目的地まで走行する牽引ルート及び前記牽引車両を決定する、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の走行に係る制御装置及び制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
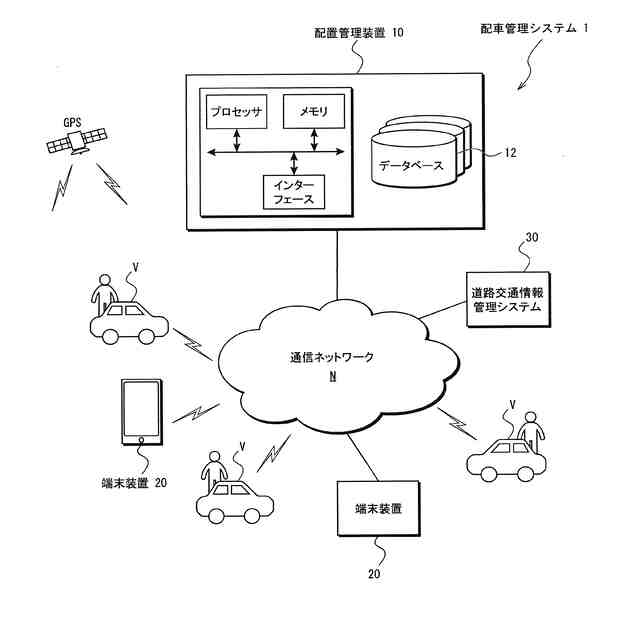
近年、自動運転システムによる車両の自動運転が実用化されつつある。自動運転により自律走行中の車両に異常や故障が発生した場合に、車両やユーザ(乗客)及び周囲の環境の安全に配慮する必要がある。車両の自動運転は、モビリティサービスに供されるサービス車両にも適用され得る。モビリティサービスは、車両によるユーザの移動や荷物の運搬をスムーズに提供するサービスである。
【0003】
例えば、下記特許文献1は、モビリティサービスに供される車両(デマンドバス)が故障して自律走行により目的地に到着できないと判断された場合に、車両を停車可能な位置に停止させる制御装置を提供する技術を開示している。
【先行技術文献】
【特許文献】
【0004】
特開2020-082918号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の特許文献1に開示された技術は、自律走行により目的地に到達不可能と判断した場合において一律に、車両を停止させるものである。車両が停止すると、ユーザは降車して他のサービス車両や公共交通機関への乗換、又は目的地への徒歩移動をすることとなる。天候(雨天、荒天、高温、低温)やユーザの属性(ユーザの年齢や体力、体調等)によっては、乗換や徒歩移動によるユーザへの負担が増大し、モビリティサービスの利便性が大きく損なわれる虞がある。
このため、異常の発生により車両の自律走行が困難であっても、可能な限り該車両によってユーザを目的地まで輸送し、ユーザの負担を軽減することが求められている。
【0006】
そこで本開示は、自動運転システムにより走行中の車両における異常の発生により自律走行が困難な場合にも、可能な限り該車両による目的地へのユーザの安全な輸送を継続し、ユーザの負担を軽減してモビリティサービスの利便性の維持を図るようにした制御装置及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の一態様の制御装置は、自律走行及び追従走行が可能な車両の走行を制御する制御装置であって、走行ルートに従って目的地まで車両の自律走行を制御する処理と、車両に異常が発生したか否かを判断する処理と、車両に異常が発生したと判断される場合に、前記異常の発生部位に基づいて実行可能な一以上の走行モードを特定する処理と、特定された前記走行モードを前記異常が発生した車両である故障車両に乗車中のユーザの端末装置に送信し、ユーザが前記端末装置の操作により承諾した一の該走行モードに応じて前記故障車両の走行を制御する処理と、を実行するコントローラを備え、前記コントローラは、前記故障車両の前記自律走行が困難と判断した場合に、先行する他の車両が牽引車両として前記故障車両を電子牽引する牽引モードを前記走行モードとして特定可能であり、前記走行モードとして前記牽引モードが特定された場合に、前記故障車両が前記電子牽引で前記目的地まで走行する牽引ルート及び前記牽引車両を決定する。
【0008】
また本開示の一態様の制御方法は、車両の自律走行を制御する制御装置により実行される制御方法であって、走行ルートに従って目的地まで車両の自律走行を制御する処理と、車両に異常が発生したか否かを判断する処理と、車両に異常が発生したと判断される場合に、前記異常の発生部位に基づいて実行可能な一以上の走行モードを特定する処理と、特定された前記走行モードを前記異常が発生した車両である故障車両に乗車中のユーザの端末装置に送信し、ユーザが前記端末装置の操作により承諾した一の該走行モードに応じて前記故障車両の走行を制御する処理と、をコントローラに実行させ、前記コントローラは、前記故障車両の前記自律走行が困難と判断した場合に、先行する他の車両が牽引車両として前記故障車両を電子牽引する牽引走行モードを前記走行モードとして特定し、前記走行モードとして前記牽引走行モードが特定された場合に、前記故障車両が前記電子牽引で前記目的地まで走行する牽引ルート及び前記牽引車両を決定する。
【発明の効果】
【0009】
本開示によれば、自動運転システムにより走行中の車両における異常の発生により自律走行が困難な場合にも、可能な限り該車両による目的地へのユーザの安全な輸送を継続し、ユーザの負担を軽減してモビリティサービスの利便性の維持を図ることができる。
【0010】
本開示の他の技術的特徴、目的、及び作用効果乃至は利点は、添付した図面を参照して説明される以下の実施形態により明らかにされる。本明細書に記載された効果はあくまで例示であって限定されるものではなく、また他の効果があっても良い。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
吸気装置
10日前
日産自動車株式会社
冷却装置
3日前
日産自動車株式会社
電池モジュール
8日前
日産自動車株式会社
エアレスタイヤ構造
16日前
日産自動車株式会社
全固体電池システム
8日前
日産自動車株式会社
蓄熱体及び加熱装置
1日前
日産自動車株式会社
制御装置及び制御方法
1日前
日産自動車株式会社
支援方法及び支援装置
10日前
日産自動車株式会社
ピックアップトラック
10日前
日産自動車株式会社
パワー半導体モジュール
8日前
日産自動車株式会社
車両乗り合わせ方法及び装置
9日前
日産自動車株式会社
車両制御方法及び車両制御装置
1日前
日産自動車株式会社
情報提供方法及び情報提供装置
16日前
日産自動車株式会社
車両制御装置及び車両制御方法
9日前
日産自動車株式会社
車両制御装置及び車両制御方法
9日前
日産自動車株式会社
情報処理装置及び情報処理方法
8日前
日産自動車株式会社
情報処理方法及び情報処理端末
3日前
日産自動車株式会社
緊急車両の通知方法及び通知装置
3日前
日産自動車株式会社
内燃機関の制御方法および制御装置
8日前
日産自動車株式会社
車両制御システム及び車両制御方法
9日前
日産自動車株式会社
内燃機関の制御方法および制御装置
8日前
日産自動車株式会社
自己位置推定方法及び自己位置推定装置
1日前
日産自動車株式会社
自動運転支援方法、及び自動運転支援装置
8日前
日産自動車株式会社
自動運転支援方法、及び自動運転支援装置
8日前
日産自動車株式会社
電子キー照合装置、方法、及び、プログラム
1日前
日産自動車株式会社
交差点進路案内方法及び交差点進路案内装置
3日前
日産自動車株式会社
駐車支援方法、駐車支援装置及びプログラム
9日前
日産自動車株式会社
内燃機関の制御方法及び内燃機関の制御装置
9日前
日産自動車株式会社
道路基準線生成方法及び道路基準線生成装置
8日前
日産自動車株式会社
ソフトウェア更新装置、ソフトウェア更新方法及びソフトウェア更新処理プログラム
10日前
個人
安全支援装置
1か月前
株式会社SUBARU
車両
1か月前
ニッタン株式会社
検知器
2か月前
個人
磁気路上での車両の路線離脱防御
2か月前
日本信号株式会社
車両検知装置
1日前
日本無線株式会社
船舶システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ