TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173368
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078924
出願日
2024-05-14
発明の名称
車両制御装置及び車両制御方法
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
50/08 20200101AFI20251119BHJP(車両一般)
要約
【課題】 停車スイッチの操作後、車両を速やかに停車可能な車両制御装置を提供する。
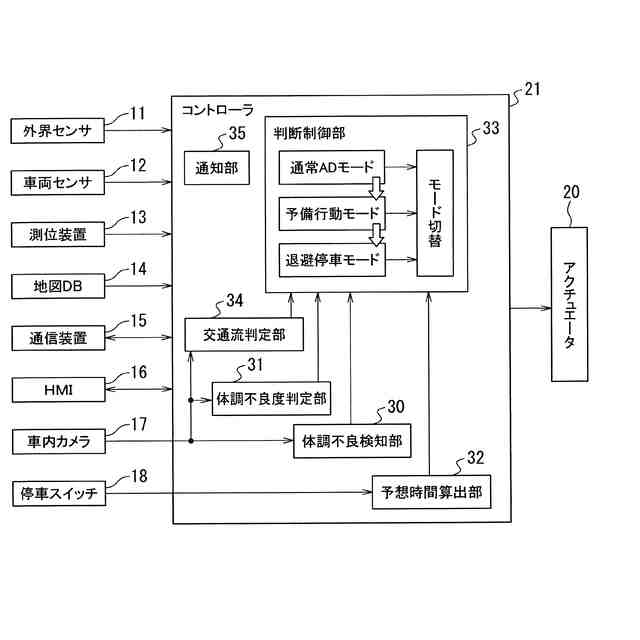
【解決手段】 体調不良検知部30は、乗員の体調不良を検知する。また、体調不良度判定部31は、体調不良が検知された乗員の体調不良の度合いを判定する。また、予想時間算出部32は、体調不良の度合いに基づき、乗員の体調不良が検知されたときから、乗員によって停車スイッチ18が操作されるまでに要する時間である予想時間を算出する。また、判断制御部33は、目標経路に従った自律走行の実行中乗員の体調不良が検知されると、その自律走行を継続しつつ、予想時間の経過前に、路肩に隣接する車線である路肩隣接車線に車両を車線変更させる予備行動制御を開始する。
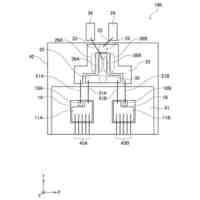
【選択図】 図2
特許請求の範囲
【請求項1】
目標経路に従って自律走行を行う車両に搭載された車両制御装置であって、
車内に設置され、前記車両の乗員により操作される停車スイッチと、
前記停車スイッチが操作されると、前記車両を路肩に停車させる制御部と、
前記車両の乗員の体調不良を検知する検知部と、
前記検知部で体調不良が検知された乗員の体調不良の度合いを判定する判定部と、
前記判定部で判定された体調不良の度合いに基づき、前記検知部で乗員の体調不良が検知されたときから、乗員によって前記停車スイッチが操作されるまでに要する時間である予想時間を算出する予想時間算出部と、を備え、
前記制御部は、前記目標経路に従った自律走行の実行中、前記検知部で乗員の体調不良が検知されると、該自律走行を継続しつつ、前記予想時間の経過前に、路肩に隣接する車線である路肩隣接車線に前記車両を車線変更させる予備行動制御を開始する
車両制御装置。
続きを表示(約 1,400 文字)
【請求項2】
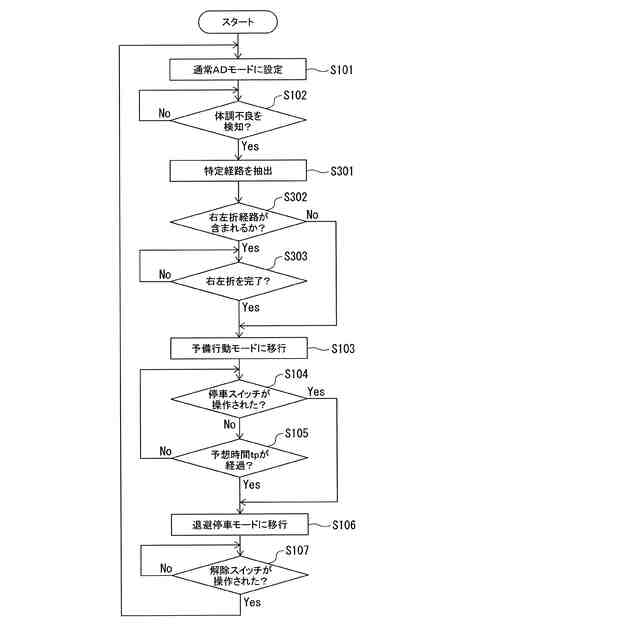
前記制御部は、前記目標経路から、前記検知部で乗員の体調不良が検知されてから前記予想時間が経過するまでの間に前記車両が走行する経路である特定経路を抽出し、抽出した前記特定経路に交差点を右左折する経路が含まれるかを判定し、交差点を右左折する経路が含まれると判定した場合には、交差点の右左折を完了した後に、前記予備行動制御を開始する
請求項1に記載の車両制御装置。
【請求項3】
前記特定経路の交通流の渋滞度を判定する交通流判定部を備え、
前記予想時間算出部は、前記交通流判定部で判定された渋滞度が所定度合い以上である場合には、前記所定度合い未満である場合に比べ、前記予想時間を短くする
請求項2に記載の車両制御装置。
【請求項4】
前記制御部は、前記路肩隣接車線への前記車両の車線変更の完了後、前記停車スイッチが操作されるまでの間、前記目標経路によって右左折が予定されている交差点である右左折予定交差点に対して所定距離手前の位置に前記車両が到達したかを判定し、前記所定距離手前の位置に前記車両が到達したと判定されると、前記路肩隣接車線からの前記右左折予定交差点の右左折が容易であると判定される場合又は前記右左折予定交差点の右左折の必要性が高いと判定される場合には、前記車両に前記右左折予定交差点の右左折を行わせた後、前記車両に再度前記路肩隣接車線への車線変更を行わせ、前記路肩隣接車線からの前記右左折予定交差点の右左折が困難であると判定され且つ前記右左折予定交差点の右左折の必要性が低いと判定された場合には、前記右左折予定交差点の右左折を回避するように、前記目標経路を変更する
請求項3に記載の車両制御装置。
【請求項5】
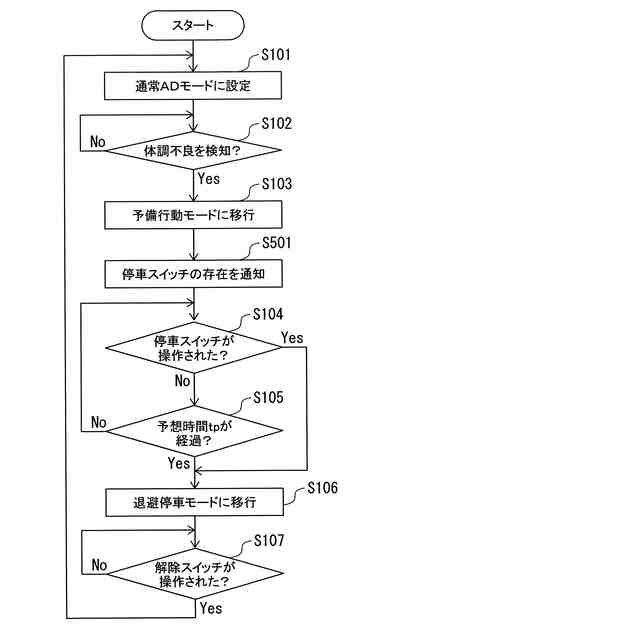
前記路肩隣接車線への前記車両の車線変更が完了した後に、乗員に対して前記停車スイッチの存在を通知する通知部を備える
請求項1に記載の車両制御装置。
【請求項6】
前記制御部は、前記検知部で乗員の体調不良が検知されてから前記予想時間が経過するまでの間に、前記停車スイッチが操作されなかった場合、前記車両を路肩に停車させる停車制御を開始する
請求項1に記載の車両制御装置。
【請求項7】
車内に設置され、前記車両の乗員により操作される解除スイッチを備え、
前記制御部は、前記停車制御の実行中、前記解除スイッチが操作されると、前記停車制御を中止する
請求項6に記載の車両制御装置。
【請求項8】
目標経路に従って自律走行を行う車両に搭載された車両制御装置による車両制御方法であって、
車内に設置された停車スイッチが操作されると、前記車両を路肩に停車させる停車制御を行うとともに、
前記車両の乗員の体調不良を検知し、
体調不良が検知された乗員の体調不良の度合いを判定し、
判定された体調不良の度合いに基づき、乗員の体調不良が検知されたときから、乗員によって前記停車スイッチが操作されるまでに要する時間である予想時間を算出し、
前記目標経路に従った自律走行の実行中、乗員の体調不良が検知されると、該自律走行を継続しつつ、前記予想時間の経過前に、路肩に隣接する車線である路肩隣接車線に前記車両を車線変更させる予備行動制御を開始する
車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置及び車両制御方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、例えば、車両の乗員により操作される停車スイッチを有し、停車スイッチが操作されると、目標トラジェクトリを生成し、生成した目標トラジェクトリに追従するように、車両を路肩に停車させる車両制御装置が提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
特開2022-89631号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の車両制御装置では、例えば、乗員が停車スイッチを操作したときに、車両と路肩との間の車線が混んでいた場合、路側隣接車線への車両の移動に多くの時間が取られ、車両が路肩に停車するまでに長い時間がかかる可能性があった。
本開示は、停車スイッチの操作後、車両を速やかに停車可能な車両制御装置及び車両制御方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本開示の一態様の車両制御装置は、目標経路に従って自律走行を行う車両に搭載された車両制御装置であって、車内に設置され、車両の乗員により操作される停車スイッチと、停車スイッチが操作されると、車両を路肩に停車させる制御部と、車両の乗員の体調不良を検知する検知部と、検知部で体調不良が検知された乗員の体調不良の度合いを判定する判定部と、判定部で判定された体調不良の度合いに基づき、検知部で乗員の体調不良が検知されたときから、乗員によって停車スイッチが操作されるまでに要する時間である予想時間を算出する予想時間算出部と、を備え、制御部は、目標経路に従った自律走行の実行中、検知部で乗員の体調不良が検知されると、自律走行を継続しつつ、予想時間の経過前に、路肩に隣接する車線である路肩隣接車線に車両を車線変更させる予備行動制御を開始する。
【0006】
また、本開示の一態様の車両制御方法は、目標経路に従って自律走行を行う車両に搭載された車両制御装置による車両制御方法であって、車内に設置された停車スイッチが操作されると、車両を路肩に停車させる停車制御を行うとともに、車両の乗員の体調不良を検知し、体調不良が検知された乗員の体調不良の度合いを判定し、判定された体調不良の度合いに基づき、乗員の体調不良が検知されたときから、乗員によって停車スイッチが操作されるまでに要する時間である予想時間を算出し、目標経路に従った自律走行の実行中、乗員の体調不良が検知されると、自律走行を継続しつつ、予想時間の経過前に、路肩に隣接する車線である路肩隣接車線に車両を車線変更させる予備行動制御を開始する。
【発明の効果】
【0007】
本開示によれば、停車スイッチの操作後、車両を速やかに停車可能な車両制御装置及び車両制御方法を提供できる。
【図面の簡単な説明】
【0008】
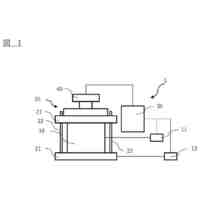
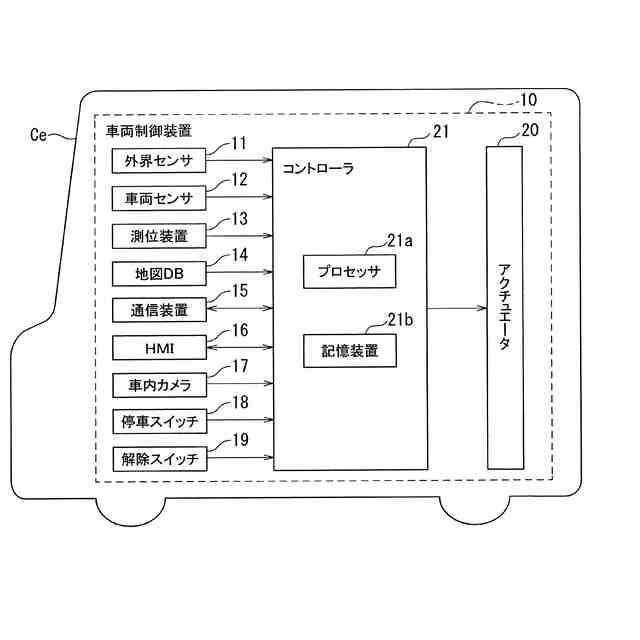
第1の実施形態の車両制御装置の概略構成を示す図である。
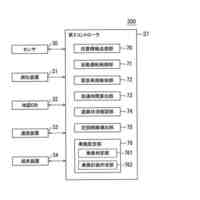
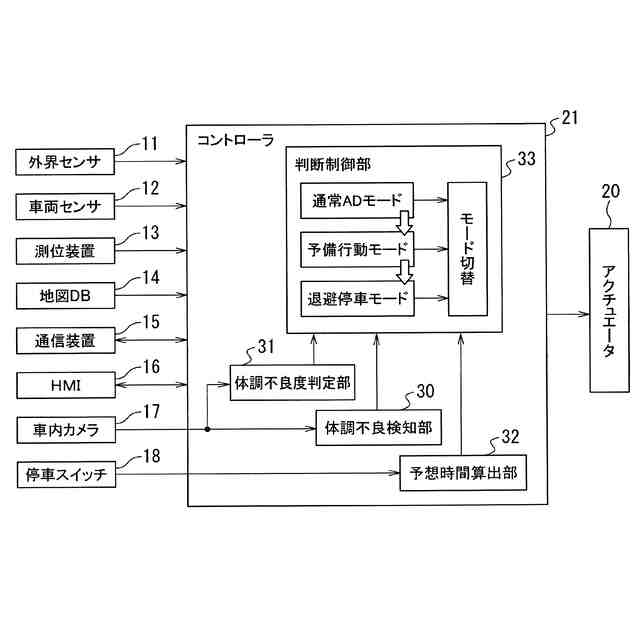
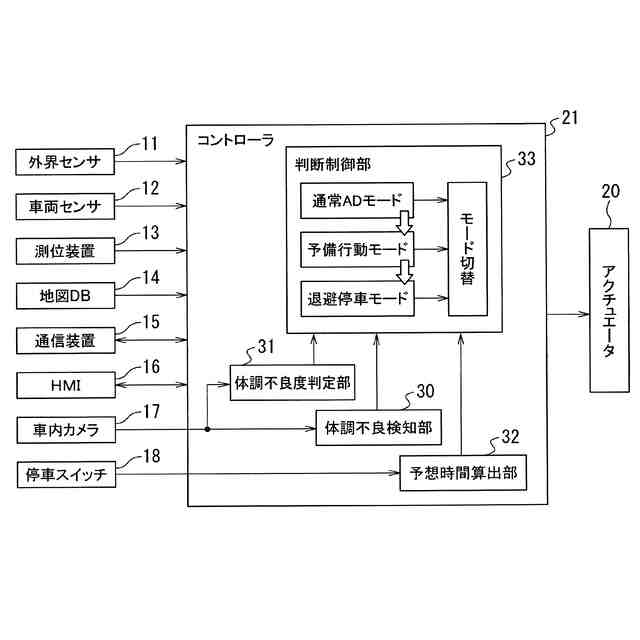
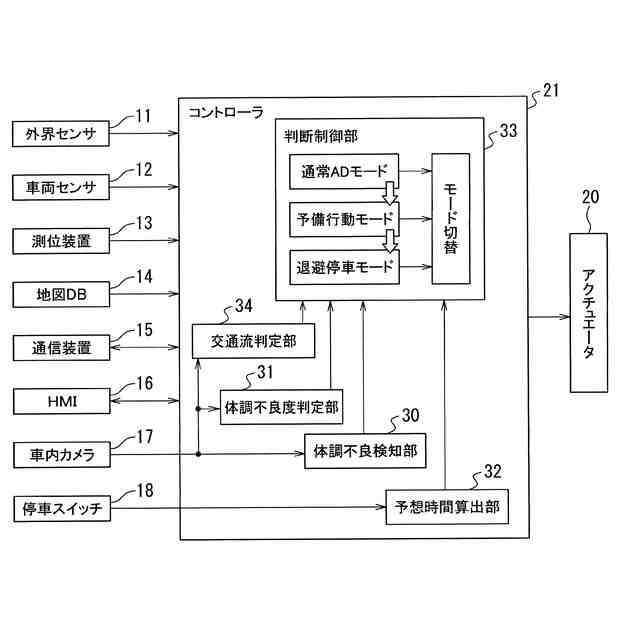
コントローラの機能構成を示す図である。
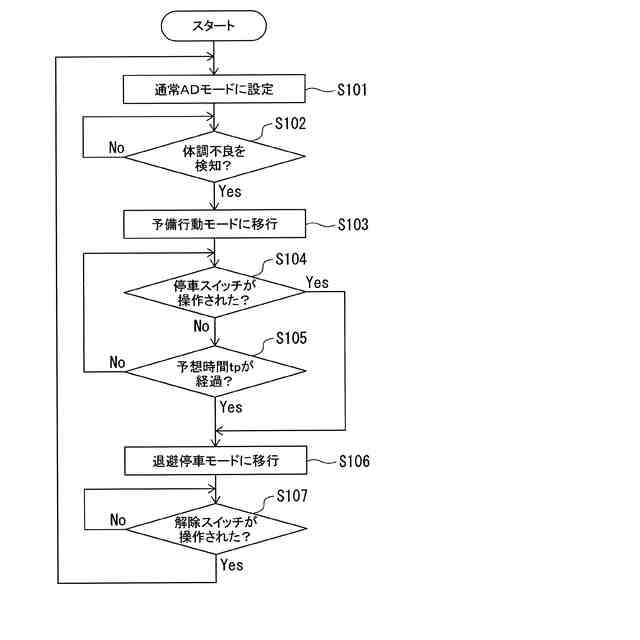
判断制御部等の動作を示すフローチャートである。
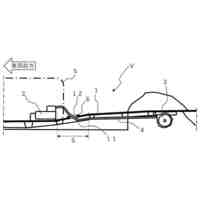
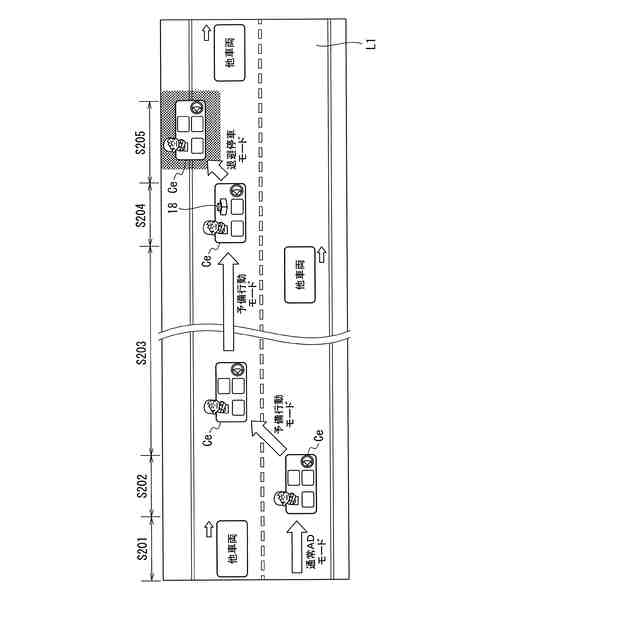
車両の動作を示す図である。
第2の実施形態の判断制御部等の動作を示すフローチャートである。
変形例のコントローラの機能構成を示す図である。
変形例の判断制御部等の動作を示すフローチャートである。
変形例のコントローラの機能構成を示す図である。
変形例の通知部等の動作を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本開示の実施形態について、図面を参照しつつ説明する。なお、各図面は模式的なものであって、現実のものとは異なる場合がある。また、以下に示す本開示の実施形態は、本開示の技術的思想を具体化するための装置や方法を例示するものであって、本開示の技術的思想は、構成部品の構造、配置等を下記のものに特定するものではない。本開示の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
【0010】
(構成)
図1は、第1の実施形態の車両制御装置10の概略構成を示す図である。第1の実施形態では、図1に示すように乗員の相乗りが可能である無人タクシー(以下「車両Ce」とも呼ぶ)に車両制御装置10を適用した場合を例示している。車両Ceは、目標経路に従って自律走行を行うように、車両Ceの走行を制御する車両制御装置10を備えている。
車両制御装置10は、外界センサ11と、車両センサ12と、測位装置13と、地図データベース(DB)14と、通信装置15と、ヒューマンマシンインタフェース(HMI:Human Machine Interface) 16と、車内カメラ17と、停車スイッチ18と、解除スイッチ19と、アクチュエータ20と、コントローラ21とを備えている。
外界センサ11は、車両Ceの前方の周囲環境を監視する前方監視センサと、車両Ceの後方の周囲環境を監視する後方監視センサとを備えている。前方監視センサ及び後方監視センサとしては、例えば、車両Ceに搭載されたレーザレーダ、ミリ波レーダ、カメラ、LIDAR(Light Detection and Ranging、Laser Imaging Detection and Ranging)等、車両Ceの周辺の物体を検出する各種の物体検出センサを採用できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
伝動部材
1か月前
日産自動車株式会社
保持機構
1か月前
日産自動車株式会社
電動車両
25日前
日産自動車株式会社
電子機器
9日前
日産自動車株式会社
吸気装置
3日前
日産自動車株式会社
二次電池
1か月前
日産自動車株式会社
二次電池
1か月前
日産自動車株式会社
内燃機関
22日前
日産自動車株式会社
内燃機関
1か月前
日産自動車株式会社
内燃機関
1か月前
日産自動車株式会社
保持機構
1か月前
日産自動車株式会社
積層型電池
1か月前
日産自動車株式会社
面圧付与機構
1か月前
日産自動車株式会社
面圧付与機構
1か月前
日産自動車株式会社
電池モジュール
1日前
日産自動車株式会社
ロータシャフト
17日前
日産自動車株式会社
電池モジュール
23日前
日産自動車株式会社
電池モジュール
1か月前
日産自動車株式会社
ロータシャフト
17日前
日産自動車株式会社
リチウム二次電池
22日前
日産自動車株式会社
車両用排気部構造
22日前
日産自動車株式会社
リチウム二次電池
1か月前
日産自動車株式会社
塗装方法及び自動車
24日前
日産自動車株式会社
全固体電池システム
1日前
日産自動車株式会社
エアレスタイヤ構造
9日前
日産自動車株式会社
ピックアップトラック
3日前
日産自動車株式会社
支援方法及び支援装置
3日前
日産自動車株式会社
ギヤ装置のブリーザ構造
1か月前
日産自動車株式会社
エンジンのアンダカバー
1か月前
日産自動車株式会社
パワー半導体モジュール
1日前
株式会社ニフコ
締結構造
1か月前
日産自動車株式会社
ターボ過給機付き内燃機関
1か月前
日産自動車株式会社
車両用荷室における排熱構造
1か月前
日産自動車株式会社
相乗り可否判定方法及び装置
1か月前
日産自動車株式会社
車両乗り合わせ方法及び装置
2日前
日産自動車株式会社
情報処理装置及び情報処理方法
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ