TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025176719
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2022160259
出願日
2022-10-04
発明の名称
自己位置推定方法及び自己位置推定装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01S
19/48 20100101AFI20251128BHJP(測定;試験)
要約
【課題】人工衛星から受信する信号から測位された観測値の信頼度を正確に検出する。
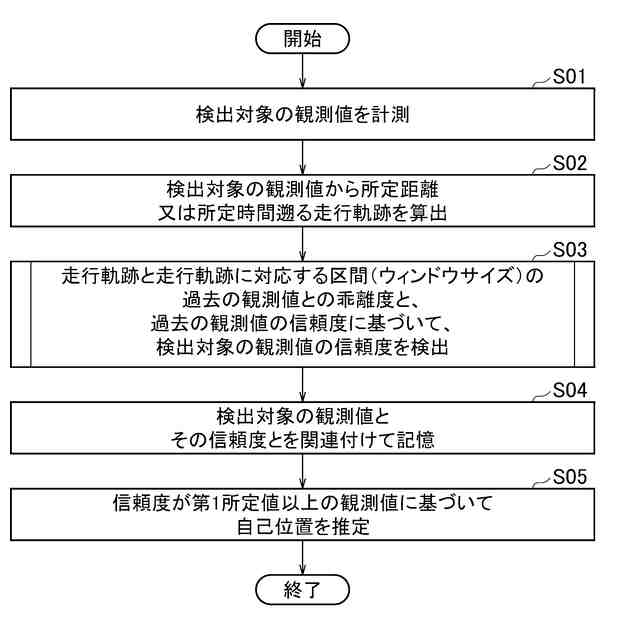
【解決手段】自己位置推定方法は、人工衛星から受信する信号から移動体の位置及び角度を検出対象の観測値として計測し(S01)、所定時刻における検出対象の観測値から所定距離遡る走行軌跡、又は所定時刻における検出対象の観測値を所定時刻から所定時間遡る移動体の走行軌跡を、移動体の相対的な移動量に基づいて算出し(S02)、算出された走行軌跡と走行軌跡に対応する区間における過去の観測値との乖離度、及び過去の観測値に関連付けて記憶されている信頼度に基づいて、所定時刻の検出対象の観測値の信頼度を検出し(S03)、所定時刻の検出対象の観測値と検出された信頼度とを関連付けて記憶し(S04)、信頼度が第1所定値以上の観測値に基づいて移動体の自己位置を推定する(S05)。
【選択図】図2
特許請求の範囲
【請求項1】
人工衛星から受信する信号から移動体の位置及び角度を検出対象の観測値として計測する測位処理と、
所定時刻における前記検出対象の観測値から所定距離遡る走行軌跡、又は前記所定時刻における前記検出対象の観測値を前記所定時刻から所定時間遡る前記移動体の走行軌跡を、前記移動体の相対的な移動量に基づいて算出する走行軌跡算出処理と、
前記走行軌跡算出処理で算出された前記走行軌跡と前記走行軌跡に対応する区間における過去の観測値との乖離度、及び前記過去の観測値に関連付けて記憶されている信頼度に基づいて、前記所定時刻の検出対象の観測値の信頼度を検出する信頼度検出処理と、
前記所定時刻の検出対象の観測値と検出された信頼度とを関連付けて記憶する信頼度記憶処理と、
前記信頼度が第1所定値以上の観測値に基づいて前記移動体の自己位置を推定する自己位置推定処理と、
を有する自己位置推定方法。
続きを表示(約 2,000 文字)
【請求項2】
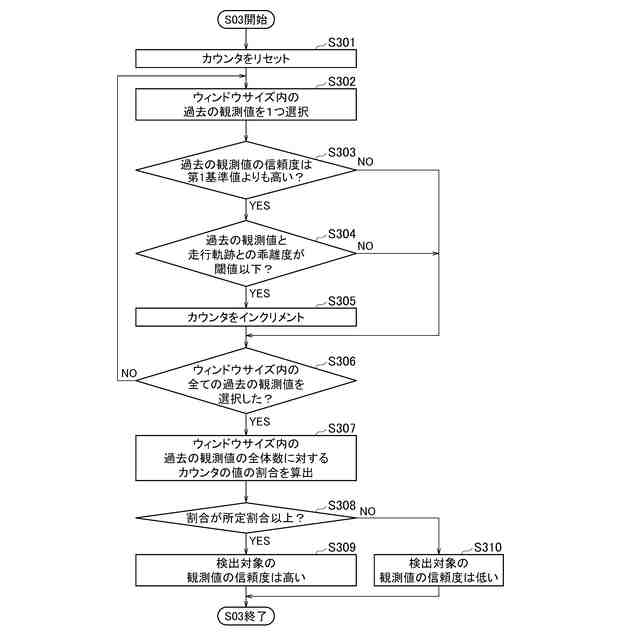
前記信頼度検出処理において、
第1基準値よりも高い信頼度が関連付けられた前記過去の観測値を抽出し、
抽出された前記過去の観測値と前記走行軌跡との前記乖離度が閾値以下か否かを判定し、
前記走行軌跡に対応する区間における前記過去の観測値の全体数に対して、前記乖離度が前記閾値以下と判定された前記過去の観測値の数が占める割合が大きい程、前記検出対象の観測値の信頼度を高く検出する
請求項1記載の自己位置推定方法。
【請求項3】
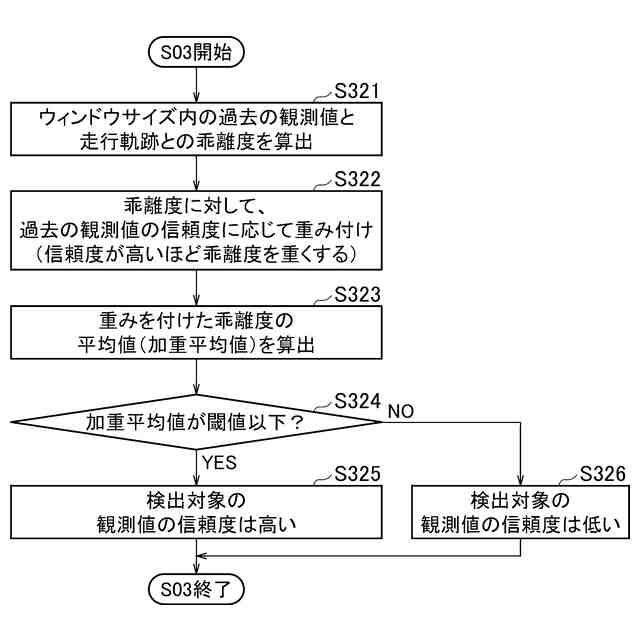
前記信頼度検出処理において、
前記乖離度の各々に対して、前記乖離度に対応する前記過去の観測値の信頼度に応じた重み付けをし、
重み付けして計算した前記乖離度の平均値が小さい程、前記検出対象の観測値の信頼度を高く検出する
請求項1記載の自己位置推定方法。
【請求項4】
前記信頼度検出処理において、前記走行軌跡に対応する区間における前記過去の観測値の、前記検出対象の観測値から遡る距離が長い程、又は前記検出対象の観測値を計測した時刻から遡る時間が長い程、前記閾値を大きく設定する
請求項2記載の自己位置推定方法。
【請求項5】
前記信頼度検出処理において、前記走行軌跡に対応する区間における前記過去の観測値の、前記検出対象の観測値から遡る距離が長い程、又は前記検出対象の観測値を計測した時刻から遡る時間が長い程、前記乖離度を短く算出する
請求項3記載の自己位置推定方法。
【請求項6】
前記測位処理において、前記移動体の位置及び角度を検出対象の観測位置及び検出対象の観測角度として計測し、
前記走行軌跡算出処理において、前記所定時刻の検出対象の観測角度から、前記移動体の角度の走行軌跡を前記移動体の相対的な移動量に基づいて算出し、
前記信頼度検出処理において、前記角度の走行軌跡と前記角度の走行軌跡に対応する区間における過去の観測角度との乖離度、及び前記過去の観測角度に関連付けている角度信頼度に基づいて、前記所定時刻の検出対象の観測角度の角度信頼度を検出し、
前記信頼度記憶処理において、前記所定時刻の検出対象の観測角度と検出された角度信頼度とを関連付けて記憶し、
前記自己位置推定処理において、前記角度信頼度が第3所定値以上の観測角度に基づいて前記移動体の角度を推定し、
前記走行軌跡算出処理において、前記所定時刻の検出対象の観測位置及び前記自己位置推定処理において推定された前記移動体の角度から、前記移動体の位置の走行軌跡を前記移動体の相対的な移動量に基づいて算出し、
前記信頼度検出処理において、前記位置の走行軌跡と前記位置の走行軌跡に対応する区間における過去の観測位置との乖離度、及び前記過去の観測位置に関連付けている位置信頼度に基づいて、前記所定時刻の検出対象の観測位置の位置信頼度を検出し、
前記信頼度記憶処理において、前記所定時刻の検出対象の観測位置と検出された位置信頼度とを関連付けて記憶し、
前記自己位置推定処理において、前記位置信頼度が第4所定値以上の観測位置及び推定された前記移動体の角度に基づいて前記移動体の位置を推定し、推定された前記移動体の角度及び前記移動体の位置を、前記移動体の自己位置として出力する
請求項1記載の自己位置推定方法。
【請求項7】
前記測位処理での前記観測値の測定精度が低いほど、前記走行軌跡算出処理において前記所定距離又は前記所定時間を長く設定する請求項1記載の自己位置推定方法。
【請求項8】
前記走行軌跡算出処理において、前記移動体の相対的な移動量の誤差が大きい程、前記所定距離又は前記所定時間を短く設定する請求項1記載の自己位置推定方法。
【請求項9】
人工衛星から受信する信号から移動体の位置及び角度を検出対象の観測値として計測する測位部と、
所定時刻における前記検出対象の観測値から所定距離遡る走行軌跡、又は前記所定時刻における前記検出対象の観測値を前記所定時刻から所定時間遡る前記移動体の走行軌跡を、前記移動体の相対的な移動量に基づいて算出する走行軌跡算出部と、
前記走行軌跡算出部で算出された前記走行軌跡と前記走行軌跡に対応する区間における過去の観測値との乖離度、及び前記過去の観測値に関連付けて記憶されている信頼度に基づいて、前記所定時刻の検出対象の観測値の信頼度を検出する信頼度検出部と、
前記所定時刻の検出対象の観測値と検出された信頼度とを関連付けて記憶する信頼度記憶部と、
前記信頼度が第1所定値以上の観測値に基づいて前記移動体の自己位置を推定する自己位置推定部と、
を有する自己位置推定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自己位置推定方法及び自己位置推定装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1に開示された異常値判定装置は、慣性航法装置で検出された速度情報の累積誤差とGPS受信情報に基づく擬似距離誤差との差が所定範囲内の値となるように所定時間を決定する。そして、この所定時間内の各時刻における速度情報及び擬似距離に基づいて移動体の位置を推定し、推定した位置と擬似距離との残差に基づいて、擬似距離の異常を判定する。
【先行技術文献】
【特許文献】
【0003】
特開2012-207919号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、異常判定の基準として、GPS受信情報と慣性航法装置で検出された情報とから推定された移動体の位置を用いている。このため、異常判定の基準自体がGPS受信情報の外れ値の影響を受けて、擬似距離の異常を誤判定してしまう場合がある。
【0005】
本発明は、上記課題に鑑みてなされたものであり、その目的は、人工衛星から受信する信号から測位された観測値の信頼度を正確に検出することができる自己位置推定方法及び自己位置推定装置を提供することにある。
【課題を解決するための手段】
【0006】
上述した問題を解決するために、本発明の一態様に係る自己位置推定方法は、人工衛星から受信する信号から移動体の位置及び角度を検出対象の観測値として計測し、所定時刻における検出対象の観測値から所定距離遡る走行軌跡、又は所定時刻における検出対象の観測値を所定時刻から所定時間遡る移動体の走行軌跡を、移動体の相対的な移動量に基づいて算出し、算出された走行軌跡、走行軌跡に対応する区間における過去の観測値との乖離度、及び過去の観測値に関連付けて記憶されている信頼度に基づいて、所定時刻の検出対象の観測値の信頼度を検出し、所定時刻の検出対象の観測値と検出された信頼度とを関連付けて記憶し、信頼度が第1所定値以上の観測値に基づいて移動体の自己位置を推定する。
【発明の効果】
【0007】
本発明によれば、人工衛星から受信する信号から測位された観測値の信頼度を正確に検出することができる。
【図面の簡単な説明】
【0008】
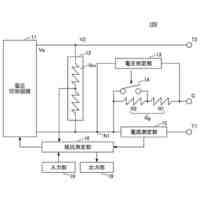
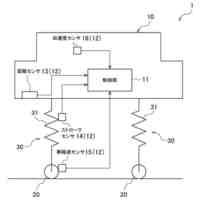
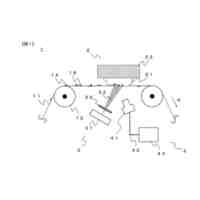
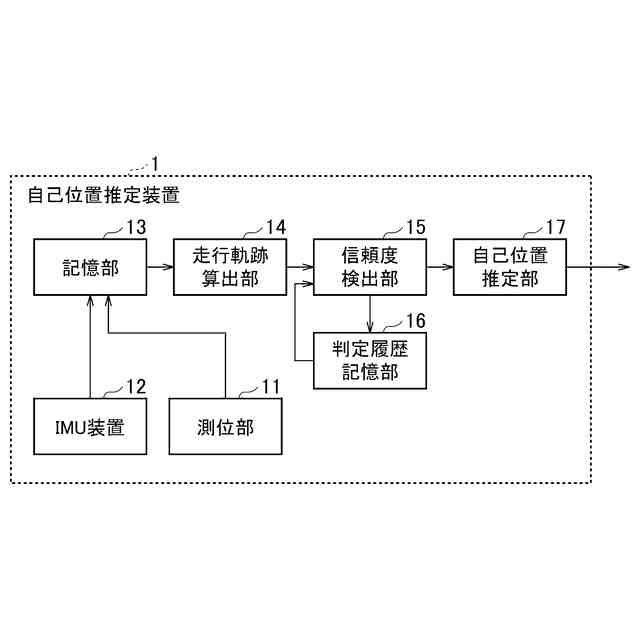
図1は、第1~第3実施形態及びその変形例に係る自己位置推定装置1の構成を示すブロック図である。
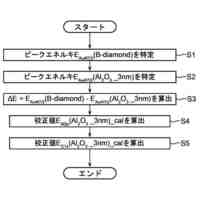
図2は、図1の自己位置推定装置1を用いた自己位置推定方法であって、第1~第3実施形態及びその変形例に係る自己位置推定方法を示すフローチャートである。
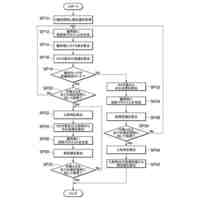
図3は、図2のフローチャートにおけるステップS03の具体的な処理例(第2実施形態)を示すフローチャートである。
図4は、図2のフローチャートにおけるステップS03の具体的な処理例(第3実施形態)を示すフローチャートである。
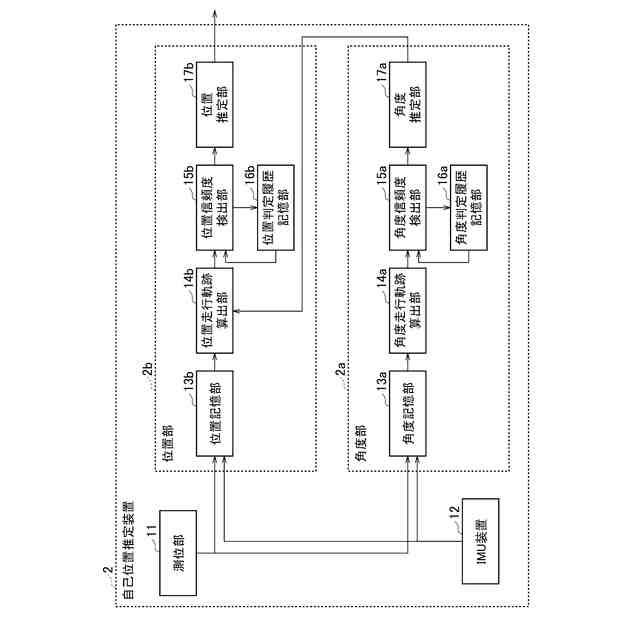
図5は、第4実施形態及びその変形例に係る自己位置推定装置2の構成を示すブロック図である。
図6は、図5の自己位置推定装置2を用いた自己位置推定方法であって、第4実施形態及びその変形例に係る自己位置推定方法を示すフローチャートである。
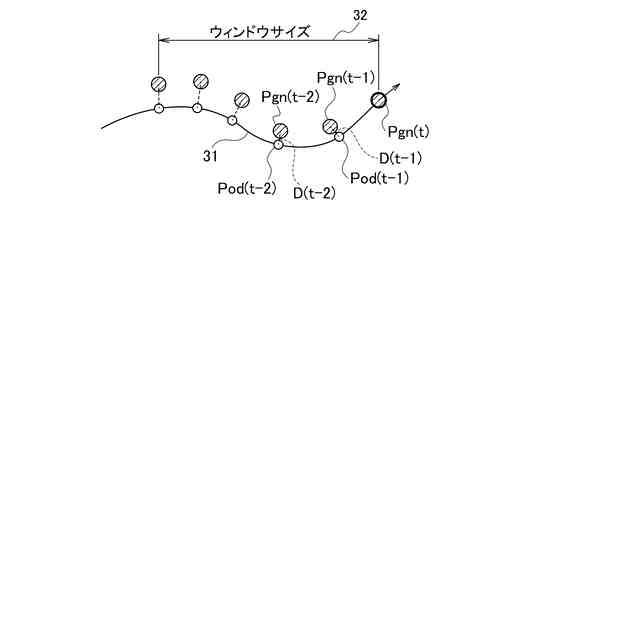
図7は、検出対象の観測値としての車両の位置(Pgn(t))と、走行軌跡31に対応する区間(ウィンドウサイズ)32における過去の観測値の一例としての車両の位置(Pgn(t)、Pgn(t-1)、Pgn(t-2)、・・・)と、乖離度の一例としての距離(D(t-1)、D(t-2)、・・・)を示す概念図である。
【発明を実施するための形態】
【0009】
次に、図面を参照して、本発明の実施の形態を詳細に説明する。説明において、同一のものには同一符号を付して重複する説明を省略する。
【0010】
(第1実施形態)
図1を参照して、第1実施形態を含む複数の実施形態に係る自己位置推定装置1の構成を説明する。自己位置推定装置1は、測位部11と、走行軌跡算出部14と、信頼度検出部15と、判定履歴記憶部16(信頼度記憶部の一例)と、自己位置推定部17と、を有する。実施形態では、移動体として車両を例示して説明するが、車両以外の船、飛行機、ロケットなど、車輪を有していない移動体にも適用可能である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
視触覚センサ
3日前
株式会社カクマル
境界杭
18日前
日本精機株式会社
発光表示装置
11日前
ユニパルス株式会社
トルク変換器
3日前
株式会社トプコン
測量装置
10日前
ユニパルス株式会社
トルク変換器
3日前
ユニパルス株式会社
トルク変換器
3日前
日本特殊陶業株式会社
ガスセンサ
4日前
日本特殊陶業株式会社
ガスセンサ
10日前
日本特殊陶業株式会社
ガスセンサ
3日前
日置電機株式会社
絶縁抵抗測定装置
3日前
日本特殊陶業株式会社
センサ
12日前
株式会社タイガーカワシマ
揚穀装置
10日前
本陣水越株式会社
車載式計測標的物
5日前
キーコム株式会社
画像作成システム
18日前
スズキ株式会社
タイヤ径算出システム
4日前
ユニパルス株式会社
トルク変換器、調整部材
3日前
理研計器株式会社
ガス検知装置
18日前
株式会社川島製作所
海苔の異物検査装置
24日前
合同会社画像技術研究所
カラーチャート
24日前
東レ株式会社
異物検査装置および異物検査方法
3日前
株式会社アイシン
回転角検出装置
18日前
CKD株式会社
シート情報確認システム
4日前
シブヤ精機株式会社
食品検査装置
3日前
国立研究開発法人物質・材料研究機構
校正方法
3日前
株式会社不二越
X線測定システム
3日前
矢崎総業株式会社
電流センサ
4日前
日本特殊陶業株式会社
FETセンサ
3日前
京セラ株式会社
振動検出方法
11日前
株式会社イシダ
計量装置
18日前
株式会社日立製作所
演算装置
10日前
矢崎総業株式会社
光ファイバ型センサ
11日前
株式会社東芝
センサ及び電子装置
5日前
株式会社ディスコ
試験装置、及び、試験方法
11日前
矢崎総業株式会社
センサ搭載構造
3日前
株式会社Profid
接触冷感測定装置
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ