TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025177255
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024083903
出願日
2024-05-23
発明の名称
エンコーダーの故障診断方法、ロボット監視装置およびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20251128BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
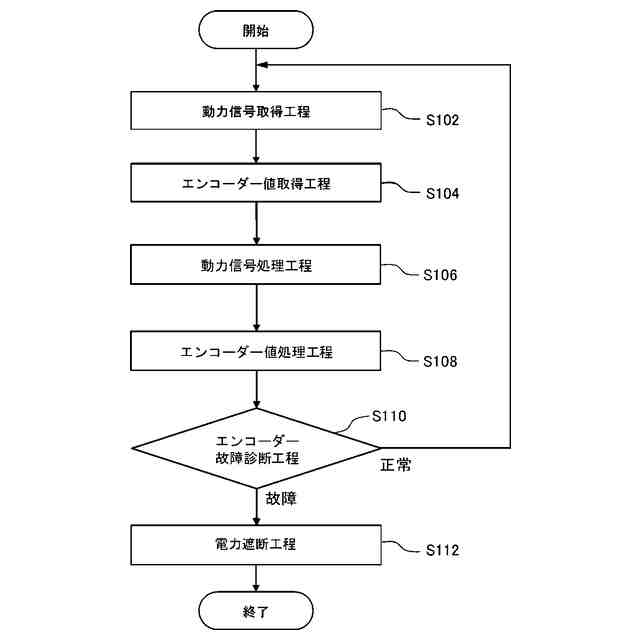
【課題】モーターに対する動作指令値が停止に相当する値であるときでも、エンコーダーの故障を検出することができるエンコーダーの故障診断方法およびロボット監視装置、ならびに、かかるロボット監視装置を備え、高い安全機能を有するロボットシステムを提供すること。
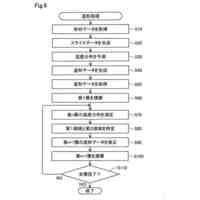
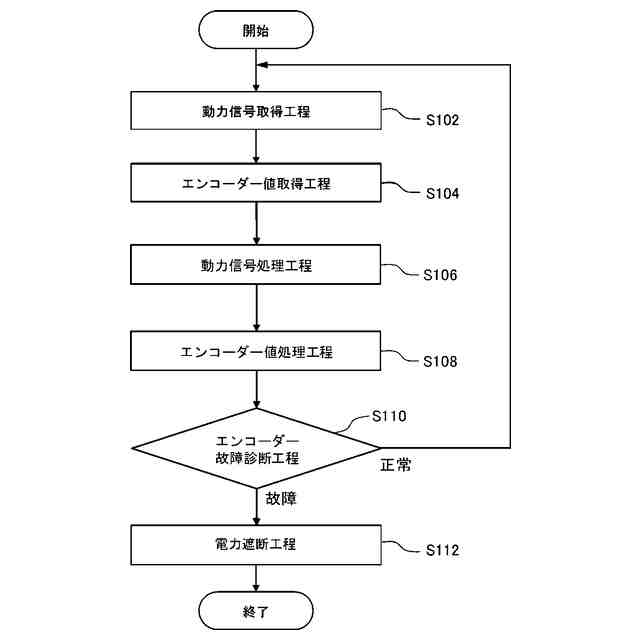
【解決手段】エンコーダーの故障を診断する方法であって、モーターの動力信号を取得する工程と、エンコーダー値を取得する工程と、動力信号に基づいて、回転軸が回転しているか否かを判断する工程と、エンコーダー値に基づいて、回転軸が回転しているか否かを判断する工程と、動力信号に基づいて回転軸が回転していると判断され、かつ、エンコーダー値に基づいて回転軸が停止していると判断されたとき、エンコーダーが故障していると診断する工程と、を有するエンコーダーの故障診断方法。
【選択図】図6
特許請求の範囲
【請求項1】
ロボットアームの関節部に設けられるモーターの回転軸の回転を検出し、エンコーダー値を出力するエンコーダーの故障を診断する方法であって、
前記モーターの動力信号を取得する工程と、
前記エンコーダー値を取得する工程と、
前記動力信号に基づいて、前記回転軸が回転しているか否かを判断する工程と、
前記エンコーダー値に基づいて、前記回転軸が回転しているか否かを判断する工程と、
前記動力信号に基づいて前記回転軸が回転していると判断され、かつ、前記エンコーダー値に基づいて前記回転軸が停止していると判断されたとき、前記エンコーダーが故障していると診断する工程と、
を有することを特徴とするエンコーダーの故障診断方法。
続きを表示(約 1,200 文字)
【請求項2】
前記モーターは、U相、V相およびW相で構成される3相のコイルを有するブラシレスモーターである請求項1に記載のエンコーダーの故障診断方法。
【請求項3】
前記動力信号を取得する工程は、3相の前記コイルに対し、前記モーターのトルク成分がゼロであるときに励磁成分がゼロ超となるようにコイル電流を流した状態で、前記動力信号を取得する処理を含む請求項2に記載のエンコーダーの故障診断方法。
【請求項4】
前記動力信号は、前記U相のコイルにおける電圧値、前記V相のコイルにおける電圧値、および、前記W相のコイルにおける電圧値のうち、2つ以上で構成される請求項1ないし3のいずれか1項に記載のエンコーダーの故障診断方法。
【請求項5】
前記動力信号は、前記U相のコイルにおける電圧の変化量、前記V相のコイルにおける電圧の変化量、および、前記W相のコイルにおける電圧の変化量のうち、2つ以上で構成される請求項1ないし3のいずれか1項に記載のエンコーダーの故障診断方法。
【請求項6】
前記動力信号は、前記U相のコイルに流れるコイル電流の電流値、前記V相のコイルに流れるコイル電流の電流値、および、前記W相のコイルに流れるコイル電流の電流値のうち、2つ以上で構成される請求項1ないし3のいずれか1項に記載のエンコーダーの故障診断方法。
【請求項7】
前記動力信号は、前記U相のコイルに流れるコイル電流の変化量、前記V相のコイルに流れるコイル電流の変化量、および、前記W相のコイルに流れるコイル電流の変化量のうち、2つ以上で構成される請求項1ないし3のいずれか1項に記載のエンコーダーの故障診断方法。
【請求項8】
関節部を備えるロボットアームと、前記関節部に設けられるモーターと、前記モーターの回転軸の回転を検出し、エンコーダー値を出力するエンコーダーと、を備えるロボットの動作を監視するロボット監視装置であって、
前記モーターの動力信号を取得する動力信号取得部と、
前記エンコーダー値を取得するエンコーダー値取得部と、
前記動力信号に基づいて、前記回転軸が回転しているか否かを判断する動力信号処理部と、
前記エンコーダー値に基づいて、前記回転軸が回転しているか否かを判断するエンコーダー値処理部と、
前記動力信号処理部により前記回転軸が回転していると判断され、かつ、前記エンコーダー値処理部により前記回転軸が停止していると判断されたとき、前記エンコーダーが故障していると診断するエンコーダー故障診断部と、
を備えることを特徴とするロボット監視装置。
【請求項9】
ロボットと、
前記ロボットの動作を制御するロボットコントローラーと、
請求項8に記載のロボット監視装置と、
を有することを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、エンコーダーの故障診断方法、ロボット監視装置およびロボットシステムに関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、モーターの動作を検出するエンコーダーを有するモーター制御装置が開示されている。このモーター制御装置は、モーター制御部と、駆動部と、遮断部と、安全制御部と、を備える。モーター制御部は、モーターを駆動するための動作指令信号と、エンコーダーからのフィードバック信号と、に基づいてモーターの動作に関する指令値を生成する。駆動部は、指令値に基づいてモーターに駆動電流を供給する。遮断部は、モーター制御部から駆動部への駆動信号の伝達を遮断する。安全制御部は、故障が発生したと判断したとき、遮断部を介して駆動信号の遮断処理を実行する。この遮断処理は、エンコーダーからのフィードバック信号により算出されるフィードバック値と、指令値の生成過程において算出された制御計算値と、の比較結果に基づいて実行される。
【0003】
具体的には、フィードバック値と制御計算値との差分が許容範囲を逸脱している場合、フィードバック信号と、本来あるべきサーボモーターの動作状態と、が乖離していることを意味する。この場合、特許文献1に記載の安全制御部は、何らかの故障が生じていると判断し、遮断処理を実行する。
【0004】
このような遮断処理を実行する安全制御部を備えることにより、エンコーダーの安全性能に縛られることなく、モーター制御装置の安全性能を高めることができる。
【先行技術文献】
【特許文献】
【0005】
特開2018-136696号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の故障検出方法では、サーボ機構による追従制御から外れたことを捉えて、安全制御部による故障の判断を行う。このため、この故障検出方法は、指令値がモーターを駆動させる信号である場合には有効に機能するが、指令値がモーターを駆動させない信号である場合には、指令値から制御計算値を算出することができない。このため、フィードバック値と制御計算値との比較を行うことができず、エンコーダーの故障を検出することができないという課題がある。
【課題を解決するための手段】
【0007】
本発明の適用例に係るエンコーダーの故障診断方法は、
ロボットアームの関節部に設けられるモーターの回転軸の回転を検出し、エンコーダー値を出力するエンコーダーの故障を診断する方法であって、
前記モーターの動力信号を取得する工程と、
前記エンコーダー値を取得する工程と、
前記動力信号に基づいて、前記回転軸が回転しているか否かを判断する工程と、
前記エンコーダー値に基づいて、前記回転軸が回転しているか否かを判断する工程と、
前記動力信号に基づいて前記回転軸が回転していると判断され、かつ、前記エンコーダー値に基づいて前記回転軸が停止していると判断されたとき、前記エンコーダーが故障していると診断する工程と、
を有する。
【0008】
本発明の適用例に係るロボット監視装置は、
関節部を備えるロボットアームと、前記関節部に設けられるモーターと、前記モーターの回転軸の回転を検出し、エンコーダー値を出力するエンコーダーと、を備えるロボットの動作を監視するロボット監視装置であって、
前記モーターの動力信号を取得する動力信号取得部と、
前記エンコーダー値を取得するエンコーダー値取得部と、
前記動力信号に基づいて、前記回転軸が回転しているか否かを判断する動力信号処理部と、
前記エンコーダー値に基づいて、前記回転軸が回転しているか否かを判断するエンコーダー値処理部と、
前記動力信号処理部により前記回転軸が回転していると判断され、かつ、前記エンコーダー値処理部により前記回転軸が停止していると判断されたとき、前記エンコーダーが故障していると診断するエンコーダー故障診断部と、
を備える。
【0009】
本発明の適用例に係るロボットシステムは、
ロボットと、
前記ロボットの動作を制御するロボットコントローラーと、
本発明の適用例に係るロボット監視装置と、
を有する。
【図面の簡単な説明】
【0010】
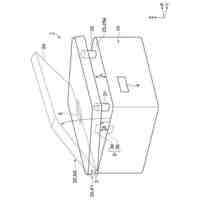
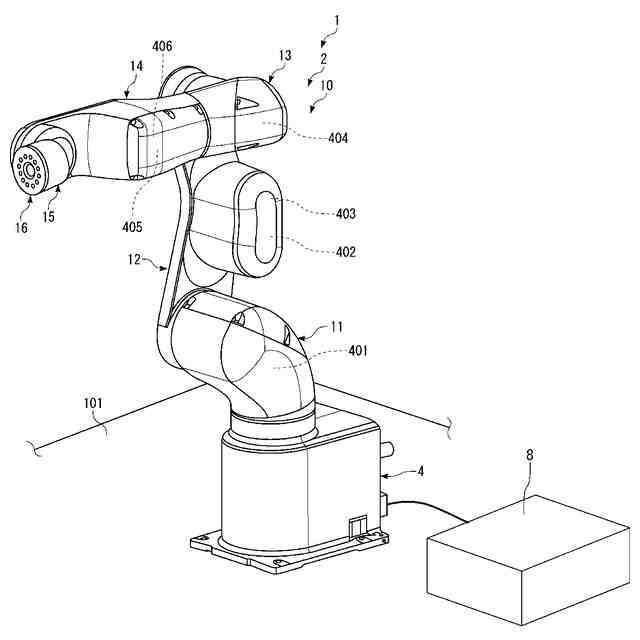
第1実施形態に係るロボットシステムを示す斜視図である。
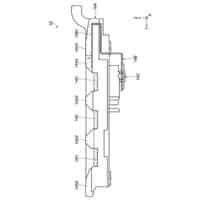
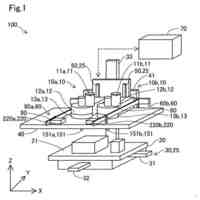
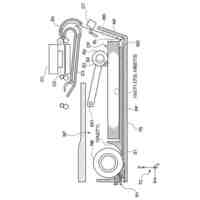
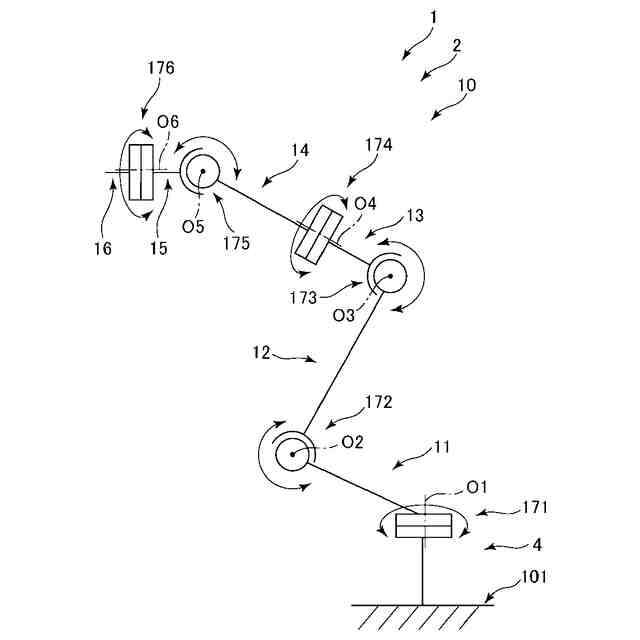
図1に示すロボットの概略図である。
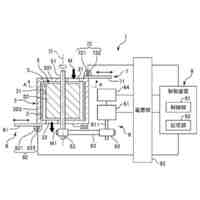
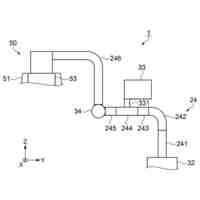
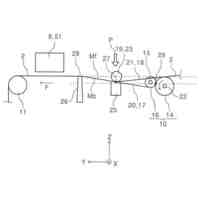
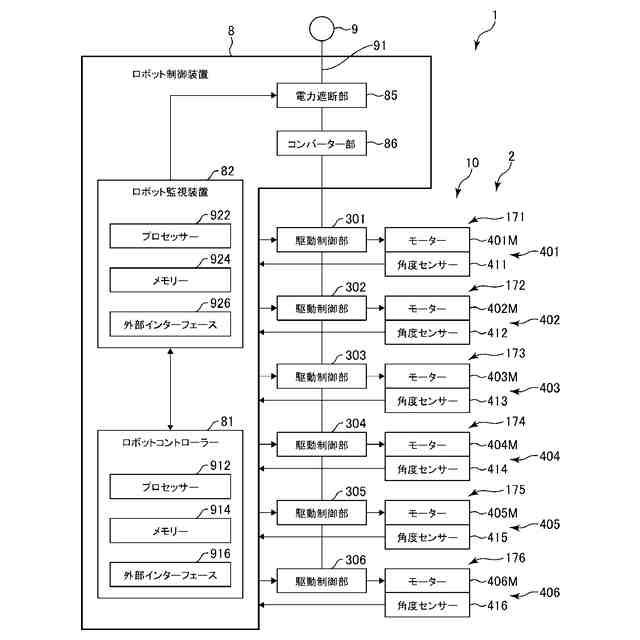
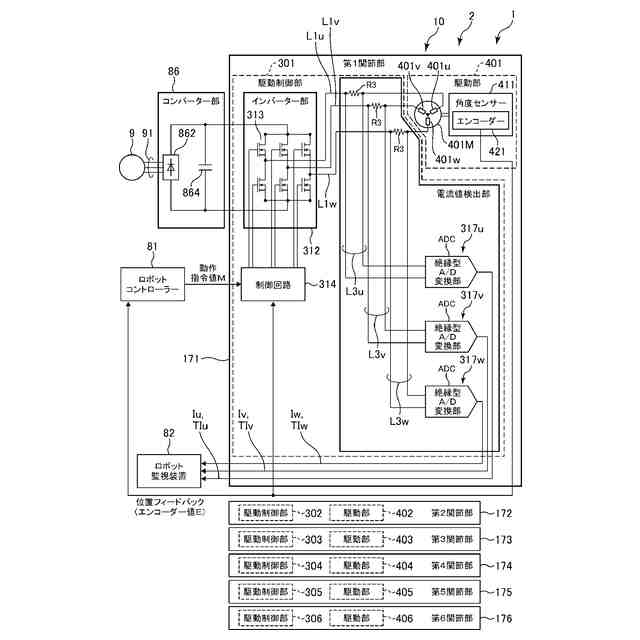
図1のロボットシステムの主要部を示すブロック図である。
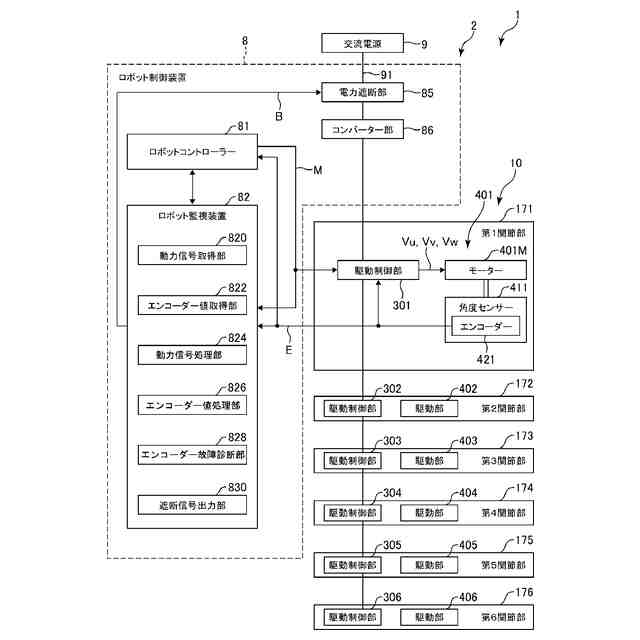
図3に示すブロック図の部分拡大図である。
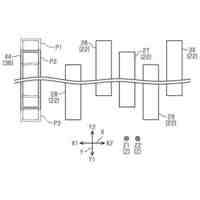
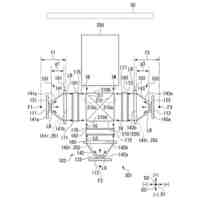
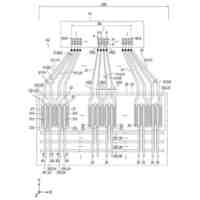
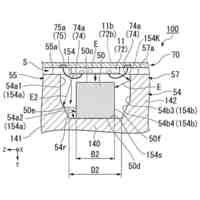
図3に示す第1関節部の詳細図およびロボット監視装置の機能ブロック図である。
第1実施形態に係るエンコーダーの故障診断方法を説明するためのフローチャートである。
第2実施形態に係るロボットシステムの主要部を示すブロック図の部分拡大図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セイコーエプソン株式会社
治療機器
11日前
セイコーエプソン株式会社
電子時計
19日前
セイコーエプソン株式会社
記録装置
1か月前
セイコーエプソン株式会社
記録装置
27日前
セイコーエプソン株式会社
電子時計
1か月前
セイコーエプソン株式会社
記録装置
11日前
セイコーエプソン株式会社
微細化装置
6日前
セイコーエプソン株式会社
微細化装置
6日前
セイコーエプソン株式会社
半導体装置
19日前
セイコーエプソン株式会社
流体デバイス
11日前
セイコーエプソン株式会社
液体吐出装置
今日
セイコーエプソン株式会社
画像記録装置
12日前
セイコーエプソン株式会社
ダイオード回路
19日前
セイコーエプソン株式会社
プロジェクター
1か月前
セイコーエプソン株式会社
シート製造装置
12日前
セイコーエプソン株式会社
フィルター装置
11日前
セイコーエプソン株式会社
三次元造形装置
1か月前
セイコーエプソン株式会社
プロジェクター
1か月前
セイコーエプソン株式会社
シート製造装置
25日前
セイコーエプソン株式会社
シート製造装置
4日前
セイコーエプソン株式会社
文字板及び時計
19日前
セイコーエプソン株式会社
トルク伝達機構
1か月前
セイコーエプソン株式会社
時計用部品及び時計
4日前
セイコーエプソン株式会社
表示装置の制御方法
1か月前
セイコーエプソン株式会社
成形方法及び成形装置
4日前
セイコーエプソン株式会社
三次元造形物の製造方法
1か月前
セイコーエプソン株式会社
三次元造形物の製造方法
4日前
セイコーエプソン株式会社
印刷装置、及び制御方法
4日前
セイコーエプソン株式会社
媒体搬送装置及び記録装置
1か月前
セイコーエプソン株式会社
媒体搬送装置及び記録装置
27日前
セイコーエプソン株式会社
乾燥装置及び印刷システム
1か月前
セイコーエプソン株式会社
電気光学装置および電子機器
4日前
セイコーエプソン株式会社
振動素子、振動子、及び発振器
12日前
セイコーエプソン株式会社
緩衝材および緩衝材の製造方法
11日前
セイコーエプソン株式会社
振動素子、振動子、及び発振器
5日前
セイコーエプソン株式会社
光源装置およびプロジェクター
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ