TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025174261
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024080419
出願日
2024-05-16
発明の名称
船舶用自動操舵装置
出願人
東京計器株式会社
代理人
個人
,
弁理士法人i.PARTNERS特許事務所
主分類
B63H
25/04 20060101AFI20251120BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】制御対象のパラメータが安定船から不安定船に変化しても、閉ループ制御系の安定性を維持できる技術を提供する。
【解決手段】一実施形態は、船体の船首方位を参照方位に追従させる方位制御系フィードバック舵角を出力する方位制御を行うフィードバック制御部13と、船体の船体パラメータを同定するパラメータ同定部15と、パラメータ同定部15により船体パラメータのノミナル値が更新されない場合、方位制御系フィードバック舵角を算出するためのフィードバックゲインが基づく設計パラメータに含まれる比例ゲインを基準値よりも大きく設定するとともに、設計パラメータに含まれる減衰係数を基準値よりも大きく設定し、パラメータ同定部15により船体パラメータのノミナル値が更新された場合、比例ゲインを基準値に設定するとともに、減衰係数を基準値に設定するロバスト設定部16とを備える。
【選択図】図9
特許請求の範囲
【請求項1】
船体の船首方位を参照方位に追従させる方位制御系フィードバック舵角を出力する方位制御を行うフィードバック制御部と、
前記船体の船体パラメータを同定するパラメータ同定部と、
前記パラメータ同定部により前記船体パラメータのノミナル値が更新されない場合、前記方位制御系フィードバック舵角を算出するためのフィードバックゲインが基づく設計パラメータに含まれる比例ゲインを該比例ゲインの基準値よりも大きく設定するとともに、前記設計パラメータに含まれる減衰係数を該減衰係数の基準値よりも大きく設定し、前記パラメータ同定部により前記船体パラメータのノミナル値が更新された場合、前記比例ゲインを該比例ゲインの基準値に設定するとともに、前記減衰係数を該減衰係数の基準値に設定するロバスト設定部と
を備える船舶用自動操舵装置。
続きを表示(約 250 文字)
【請求項2】
前記フィードバック制御部は、更に、前記船体の船体位置を航路に追従させる航路制御系フィードバック舵角を出力する航路制御を行い、
前記ロバスト設定部は、更に、前記パラメータ同定部により前記船体パラメータのノミナル値が更新されない場合、前記フィードバック制御部が前記方位制御のみを行うように制限し、前記パラメータ同定部により前記船体パラメータのノミナル値が更新された場合、前記フィードバック制御部に対する制限を解除することを特徴とする請求項1に記載の船舶用自動操舵装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶を自動操舵する技術に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、非特許文献1に示すような自律化船が知られている。このような自律化船には、例えば、出港して目的地まで最短で到着し、そこで救難、救助、探索や監視などの業務を遂行した後、帰港するような任務が与えられる。
【0003】
このような任務の遂行中、自律化船の操船作業は舵手の代わりにオートパイロットが担うことが要求される。その場合、オートパイロットは従前の適応型から、非特許文献2に示すような自己完結型が利用されることが望ましい。適応型のオートパイロットは針路や航路への追従や海象環境による外乱に対応することを主目的とする。一方、自己完結型のオートパイロットは上述の追従や外乱に対する対応をするだけでなく、その制御システムを運航状態から常に適切な状態に保つ機能をもつ。これによって、自律化船はその本来の目的に注力できる。
【0004】
自己完結型の制御システムがもつ性能のひとつにロバスト性がある。タンカー、貨物船では、荷役(にやく)作業で喫水が変化する。喫水変化に伴なって、船体モデルのパラメータも変化する。針路安定船(単に安定船とよぶ)のパラメータが、荷役作業後に不安定船のものに変わった場合を想定する。オートパイロットはそのパラメータ変化を許容できないと、yawing発生の原因になる場合がある。このような針路不安定船の許容限界に関する考察が知られている(非特許文献3参照)。
【0005】
本願発明者は、船体パラメータ不確かさ(簡単に不確かさとよぶ)がある場合のロバスト制御技術を報告した(非特許文献4参照)。しかしながら、不確かさ範囲は安定船の領域であった。そのため、このロバスト制御技術によれば、不安定船の領域では閉ループ安定性を保証することができない。
【先行技術文献】
【非特許文献】
【0006】
Hideyuki Ando, Capt Satoru Kuwahara,Capt Koji Kutsuna,and Capt Jun Nakamura,Development and demonstration of autonomous ships in japan,In World Maritime Technology Conference(WMTC),2022.
羽根冬希,船舶用オートパイロットの実践的設計手法,PhD thesis,大阪大学,2023.
長谷川和彦,石山忠治,梅田宏規,オートパイロットによる針路不安定船の許容限界に関する考察(第1報),日本造船学会論文集,Vol.1980,No.148,pp.92-100,1980.
羽根冬希,航路保持システムのための保針制御に基づく解析的方法による設計,日本船舶海洋工学会論文集,Vol.23,pp.33‐44,jun 2016.
早勢実,システム制御工学入門,オーム社,1980.
Francis H. Raven,Automatic Control Engineering,McGraw-Hill,Inc.,New York,NY,USA,3rd edition,1978.
羽根冬希,船体運動パラメータの包括的同定手法,日本船舶海洋工学会論文集,Vol.20,pp.27-38,dec 2014.
羽根冬希,オートパイロット用の波浪外乱パラメータの同定手法,日本船舶海洋工学会講演会論文集,(23):461-465,2016.
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする課題は、制御対象のパラメータが安定船から不安定船に変化しても、閉ループ制御系の安定性を維持できる技術を提供することである。
【課題を解決するための手段】
【0008】
一実施形態は、船体の船首方位を参照方位に追従させる方位制御系フィードバック舵角を出力する方位制御を行うフィードバック制御部と、前記船体の船体パラメータを同定するパラメータ同定部と、前記パラメータ同定部により前記船体パラメータのノミナル値が更新されない場合、前記方位制御系フィードバック舵角を算出するためのフィードバックゲインが基づく設計パラメータに含まれる比例ゲインを該比例ゲインの基準値よりも大きく設定するとともに、前記設計パラメータに含まれる減衰係数を該減衰係数の基準値よりも大きく設定し、前記パラメータ同定部により前記船体パラメータのノミナル値が更新された場合、前記比例ゲインを該比例ゲインの基準値に設定するとともに、前記減衰係数を該減衰係数の基準値に設定するロバスト設定部とを備える。
【発明の効果】
【0009】
本発明によれば、制御対象のパラメータが安定船から不安定船に変化しても、閉ループ制御系の安定性を維持できる技術を提供できる。
【図面の簡単な説明】
【0010】
喫水変化による船体パラメータの変動傾向を示す表である。
C
a
特性を示す図である。
喫水とパラメータ不確かさとの関係を示す図である。
船体運動と方位誤差とを示す図である。
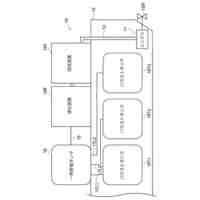
閉ループ制御システムの構成を示す図である。
GH
h4
Δa
(s)におけるΔ
a
による根軌跡を示す図である。
GH
h4
Δa
(s)におけるΔ
b
による根軌跡を示す図である。
ロバスト制御のアプローチを示す表である。
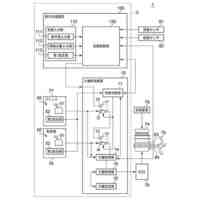
実施形態に係る船舶用自動操舵装置の構成を示すブロック図である。
実施形態に係るロバスト制御部の動作を示す概略図である。
Δ
a
による減衰係数ζ
h4
Δa
,ζ
h7
Δa
の最小値を示す図である。
船体パラメータとパラメータ不確かさを示す表である。
シミュレーション結果をまとめた表である。
ロバスト制御を行わない場合のシミュレーション結果を示す図である。
ロバスト制御を行った場合の開始時の船首方位、航路誤差、命令舵角を示す図である。
ロバスト制御を行った場合の方位制御に関するノミナル値更新時の船首方位、航路誤差、命令舵角を示す図である。
ロバスト制御を行った場合の航路制御に関するノミナル値更新時の船首方位、航路誤差、命令舵角を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
東京計器株式会社
船舶用自動操舵装置
2日前
東京計器株式会社
検査装置、検査システム、検査方法及びプログラム
2か月前
個人
水上遊具
6か月前
個人
洋上研究所
4か月前
個人
補助機構
8か月前
個人
津波防災ウエア
3か月前
個人
船用横揺防止具
9か月前
個人
コンパクトシティ船
8か月前
個人
渦流動力推進構造
8か月前
石田造船株式会社
内航船
23日前
個人
セールのバテンガイド装置
4か月前
個人
水質浄化・集熱昇温システム
5か月前
炎重工株式会社
浮標
10か月前
炎重工株式会社
浮標
10か月前
住友重機械工業株式会社
船舶
5か月前
株式会社フルトン
水中捕捉装置
8か月前
個人
船舶
10か月前
株式会社ラフティ
サーフボード
5か月前
個人
スクリュープロペラ
8か月前
オーケー工業株式会社
係留フック
9か月前
ペアリ株式会社
海の環境改善装置
1か月前
個人
回転式による流体流出防止タンカー
8か月前
ヤマハ発動機株式会社
船外機
10か月前
スズキ株式会社
船外機
8か月前
スズキ株式会社
船外機
7か月前
スズキ株式会社
船外機
8か月前
スズキ株式会社
船外機
7か月前
株式会社アカデミー出版
船舶
4か月前
常石造船株式会社
メタノール燃料船
11か月前
朝日電装株式会社
船外機用照明装置
3か月前
藤倉コンポジット株式会社
架台
11か月前
ナブテスコ株式会社
主機制御システム
2か月前
炎重工株式会社
自律航行浮遊体
10か月前
株式会社ユピテル
システム及びプログラム等
7か月前
ヤマハ発動機株式会社
船舶推進機
1か月前
スズキ株式会社
船舶推進機
6か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ