TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025173065
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078409
出願日
2024-05-14
発明の名称
操舵支援装置
出願人
株式会社SUBARU
代理人
弁理士法人テクノピア国際特許事務所
主分類
B62D
6/00 20060101AFI20251119BHJP(鉄道以外の路面車両)
要約
【課題】オーバーライドの際の操舵感向上を、操舵支援機能を損なわずに実現する。
【解決手段】操舵支援装置は、走行状況に応じて求めた操舵ハンドル角に応じて操舵制御トルクを算出する制御トルク算出処理と、操舵支援中の運転者によるハンドル操作であるオーバーライドを判定する判定処理と、オーバーライドと判定された場合に、走行状況から操舵制御トルクのリミット値を算出するトルクリミット算出処理と、オーバーライドと判定された場合に、制御トルク算出処理で算出した制御トルクをトルクリミット算出処理で算出したリミット値で制限してステアリング機構に指示するトルク指示処理を実行する。
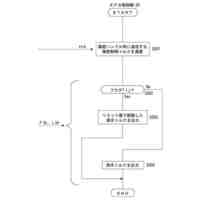
【選択図】図7
特許請求の範囲
【請求項1】
車両の走行を車線内に維持する操舵制御を行う操舵支援装置であって、
一又は複数のプロセッサと、
前記一又は複数のプロセッサによって実行されるプログラムが記憶された一又は複数の記憶媒体と、を備え、
前記プログラムは、一又は複数の指示を含み、
前記指示は、前記一又は複数のプロセッサに、
走行状況に応じて求めた操舵ハンドル角に応じて操舵制御トルクを算出する制御トルク算出処理と、
操舵支援中における運転者によるハンドル操作であるオーバーライドを判定する判定処理と、
走行状況に基づいて前記操舵制御トルクのリミット値を算出するトルクリミット算出処理と、
前記判定処理でオーバーライドと判定された場合に、前記制御トルク算出処理で算出した制御トルクを前記トルクリミット算出処理で算出したリミット値で制限してステアリング機構に指示するトルク指示処理と、を実行させる
操舵支援装置。
続きを表示(約 400 文字)
【請求項2】
前記指示は、前記一又は複数のプロセッサに、
前記トルクリミット算出処理において、走行状況として、車線内の自車両の横位置に基づいてリミット値を算出する処理を実行させる
請求項1に記載の操舵支援装置。
【請求項3】
前記指示は、前記一又は複数のプロセッサに、
前記トルクリミット算出処理において、走行状況として、車線の曲率、横断勾配、対車線ヨー角、対車線ヨー角の加速度のうちの少なくとも1つを用いてリミット値を算出する処理を実行させる
請求項1又は請求項2に記載の操舵支援装置。
【請求項4】
前記指示は、前記一又は複数のプロセッサに、
前記トルクリミット算出処理において、撮像画像から走行状況を判定し、判定結果を参照してリミット値を算出する処理を実行させる
請求項1又は請求項2に記載の操舵支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は車両が車線内を走行するように制御を行う操舵支援装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
下記特許文献1には、車両の操舵機構に操舵トルクを付与して操舵支援を行う操舵支援装置に関する技術が開示されている。そして運転者のハンドル操作があったと判断した場合、ハンドル操作がないと判断した場合と比べて操舵制御の操舵トルクの変化率の制限値を小さく設定して操舵トルクの出力を抑制することが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-89692号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
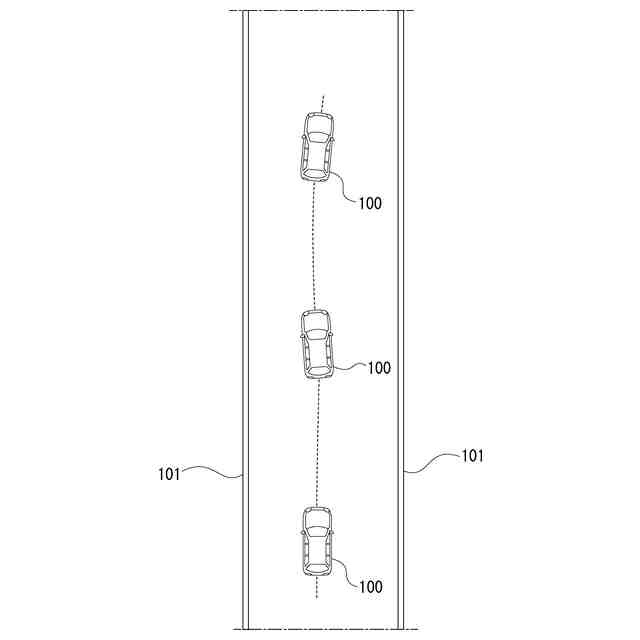
車両が操舵支援により車線中央維持、いわゆるレーンキープ制御動作を行っている場合に運転者が行うハンドル操作をオーバーライドと呼ぶ。運転者は、オーバーライドの場合は操舵感として通常の操舵よりも重く感じてしまう。操舵感向上のためには、オーバーライド時にレーンキープ制御動作の操舵制御トルクを抑制することが考えられる。
【0005】
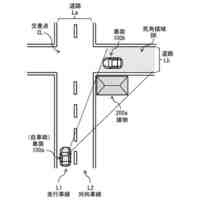
ところがオーバーライド時の操舵感をむやみに軽くしてしまうと、例えばカーブの入り口やカーブ中などに運転者が意図していないオーバーライド判定され、車線中央維持が適切に行われなくなる可能性がある。例えば車線が左カーブしている状況で操舵支援により左への操舵トルクを指示するとき、運転者がハンドルをしっかり握っていると、トルクセンサの出力により、運転者が右方向に操舵していると誤判定する可能性がある。
【0006】
そこで本発明では、操舵支援の実行中に、走行状況に応じてオーバーライド時の操舵感を変える技術を提案する。
【課題を解決するための手段】
【0007】
本発明の一実施の形態は、車両の走行を車線内に維持する操舵制御を行う操舵支援装置であって、一又は複数のプロセッサと、前記一又は複数のプロセッサによって実行されるプログラムが記憶された一又は複数の記憶媒体と、を備え、前記プログラムは、一又は複数の指示を含み、前記指示は、前記一又は複数のプロセッサに、走行状況に応じて求めた操舵ハンドル角に応じて操舵制御トルクを算出する制御トルク算出処理と、操舵支援中における運転者によるハンドル操作であるオーバーライドを判定する判定処理と、前記判定処理でオーバーライドと判定された場合に、走行状況に基づいて前記操舵制御トルクのリミット値を算出するトルクリミット算出処理と、前記判定処理でオーバーライドと判定された場合に、前記制御トルク算出処理で算出した制御トルクを前記トルクリミット算出処理で算出したリミット値で制限してステアリング機構に指示するトルク指示処理と、を実行させる。
【発明の効果】
【0008】
本発明によれば、走行状況に応じて車線中央維持の機能強化とオーバーライドの操舵感の向上を実現できる。
【図面の簡単な説明】
【0009】
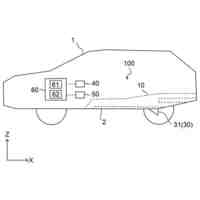
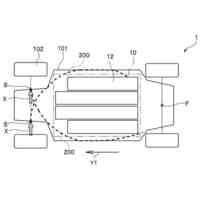
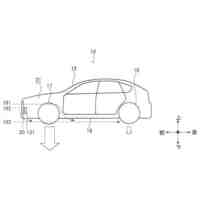
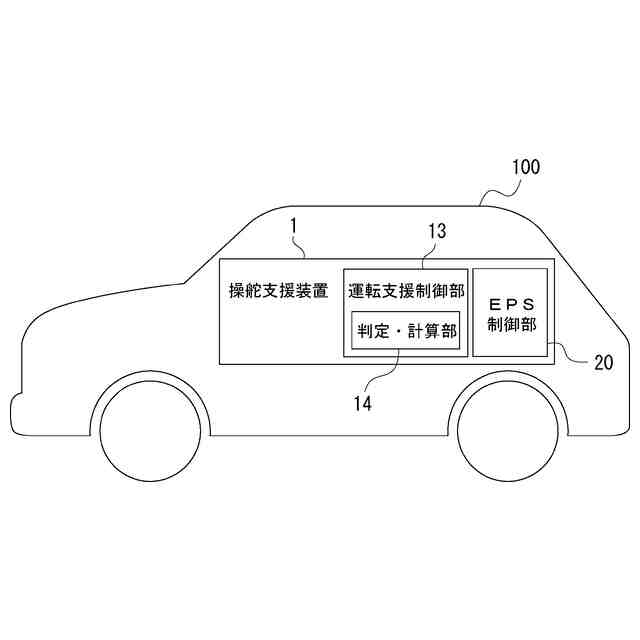
実施の形態の操舵支援装置を備える車両の説明図である。
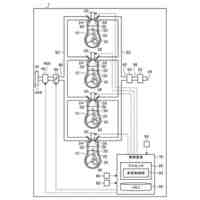
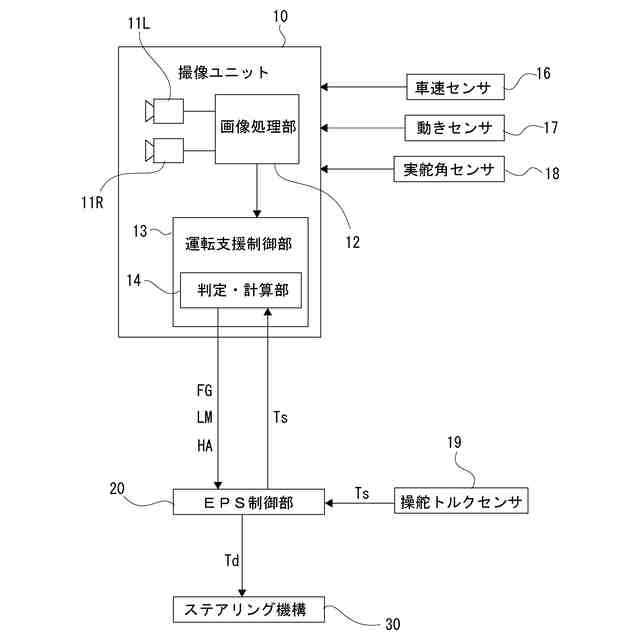
実施の形態の操舵支援装置の構成例の説明図である。
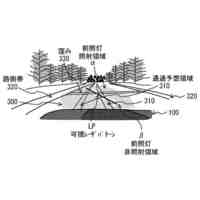
実施の形態の操舵支援による車線中央維持の説明図である。
実施の形態の横位置に応じたトルク制御の説明図である。
実施の形態の横位置に応じたトルクリミット設定の説明図である。
実施の形態の判定・計算部の処理例のフローチャートである。
実施の形態のEPS制御部の処理例のフローチャートである。
【発明を実施するための形態】
【0010】
<装置構成>
以下、本発明の実施の形態を、添付図面を参照して説明する。
図1は、実施の形態としての操舵支援装置1を備える車両100の構成概要を示す図であり、図2は操舵支援装置1及び関連部位を含む構成例の説明図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SUBARU
車両
今日
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
28日前
株式会社SUBARU
車体前部構造
21日前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
整流システム
1か月前
株式会社SUBARU
運転支援装置
28日前
株式会社SUBARU
車両前部構造
22日前
株式会社SUBARU
車両前部構造
22日前
株式会社SUBARU
車両前部構造
22日前
株式会社SUBARU
車体前部構造
21日前
株式会社SUBARU
車両前部構造
22日前
株式会社SUBARU
車両用シート
7日前
株式会社SUBARU
車両用シート
7日前
株式会社SUBARU
操作システム
20日前
株式会社SUBARU
車両用シート
7日前
株式会社SUBARU
操舵支援装置
今日
株式会社SUBARU
シフト制御装置
7日前
株式会社SUBARU
車両用電池パック
7日前
株式会社SUBARU
エンジン制御装置
20日前
株式会社SUBARU
電動式全輪駆動車
1か月前
株式会社SUBARU
車両用周辺監視装置
1か月前
株式会社SUBARU
車両の降車補助装置
1か月前
株式会社SUBARU
ドアロック制御装置
21日前
株式会社SUBARU
車両用空力制御装置
今日
株式会社SUBARU
電波吸収体の製造方法
13日前
株式会社SUBARU
運転補助装置および車両
28日前
株式会社SUBARU
車両用高圧燃料配管構造
7日前
株式会社SUBARU
カーテンエアバッグ装置
23日前
株式会社SUBARU
インフレータブル構造体
7日前
株式会社SUBARU
運転支援装置および車両
1か月前
株式会社SUBARU
車両の車高自動調整装置
1か月前
株式会社SUBARU
運転支援装置および車両
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ