TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025171060
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024076038
出願日
2024-05-08
発明の名称
制御装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H02M
7/48 20070101AFI20251113BHJP(電力の発電,変換,配電)
要約
【課題】位置推定精度を向上可能な制御装置を提供すること。
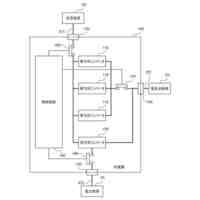
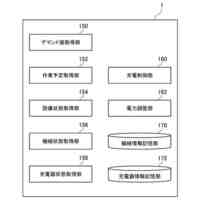
【解決手段】制御装置は、γ軸電圧指令値V
*
γ
及びδ軸電圧指令値V
*
δ
を駆動信号に変換してインバータに出力する駆動信号出力部と、γ軸電流値I
γ
、δ軸電流値I
δ
、γ軸電圧指令値V
*
γ
及びδ軸電圧指令値V
*
δ
に基づいて、モータにおいて生じる推定拡張誘起電圧を算出し、推定拡張誘起電圧に基づいてモータの推定位置θ^
re1
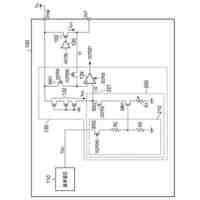
を算出する推定部55と、を備え、駆動信号出力部は、再起動要求を受けた場合又はモータが低速で回転していると判定された場合、上アーム短絡駆動信号又は下アーム短絡駆動信号を生成し、推定部55は、上アーム短絡駆動信号又は下アーム短絡駆動信号によってモータに流れる電流から推定位置θ^
re1
を零と設定して変換したγ軸電流値I
γ
及びδ軸電流値I
δ
の微分値に基づいて、推定位置θ^
re1
を算出する。
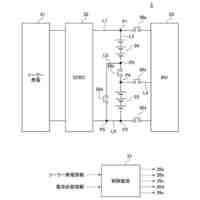
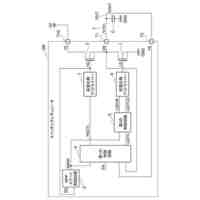
【選択図】図2
特許請求の範囲
【請求項1】
モータを駆動させるインバータを制御する駆動信号を生成する制御装置であって、
前記モータに流れる電流をγ軸電流値及びδ軸電流値に変換する電流値変換部と、
γ軸電流指令値及びδ軸電流指令値を出力するγ-δ電流指令値出力部と、
前記γ軸電流値と前記γ軸電流指令値と前記δ軸電流値と前記δ軸電流指令値とに基づいてγ軸電圧指令値及びδ軸電圧指令値を算出するγ-δ電圧指令値算出部と、
前記γ軸電圧指令値及び前記δ軸電圧指令値を前記駆動信号に変換して前記インバータに出力する駆動信号出力部と、
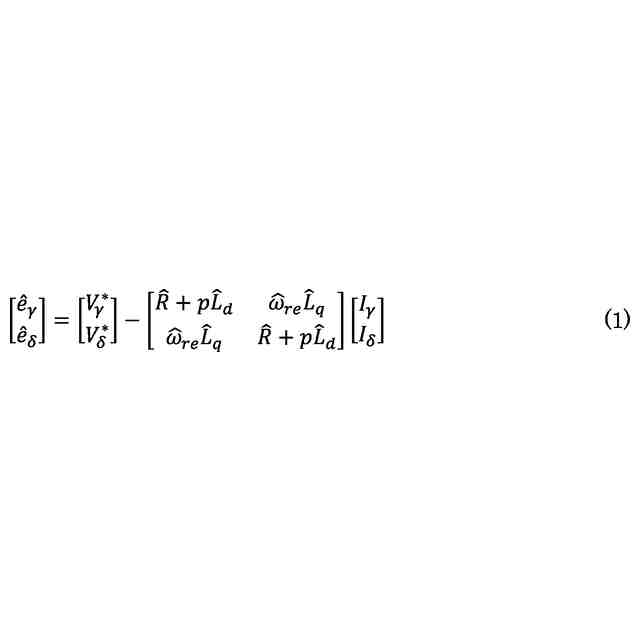
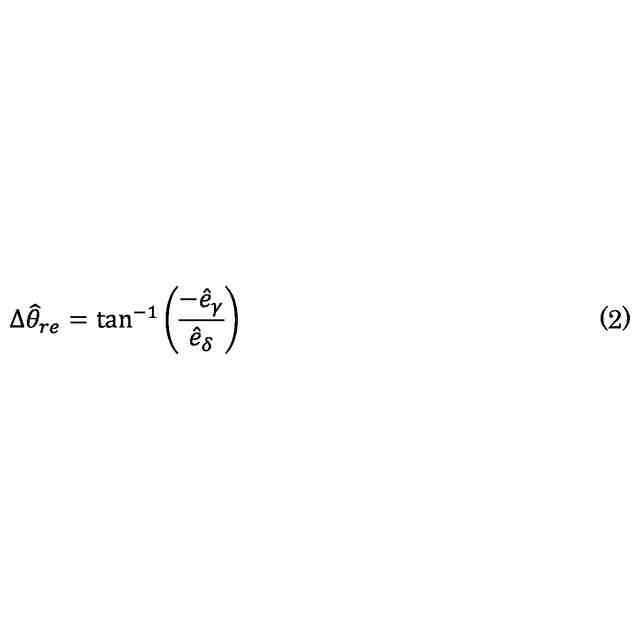
前記γ軸電流値、前記δ軸電流値、前記γ軸電圧指令値及び前記δ軸電圧指令値に基づいて、前記モータにおいて生じる拡張誘起電圧の推定値である推定拡張誘起電圧を算出し、前記推定拡張誘起電圧に基づいて前記モータの位置の推定値である推定位置を算出する推定部と、
を備え、
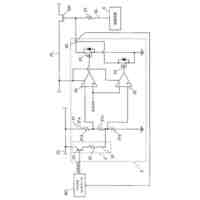
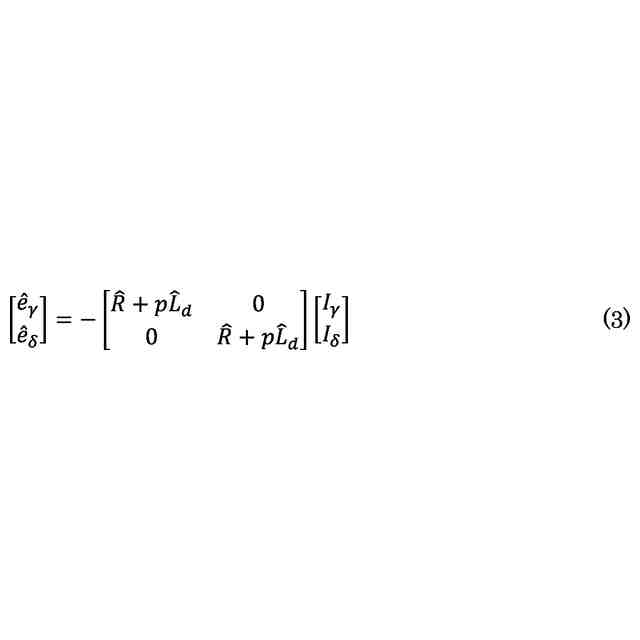
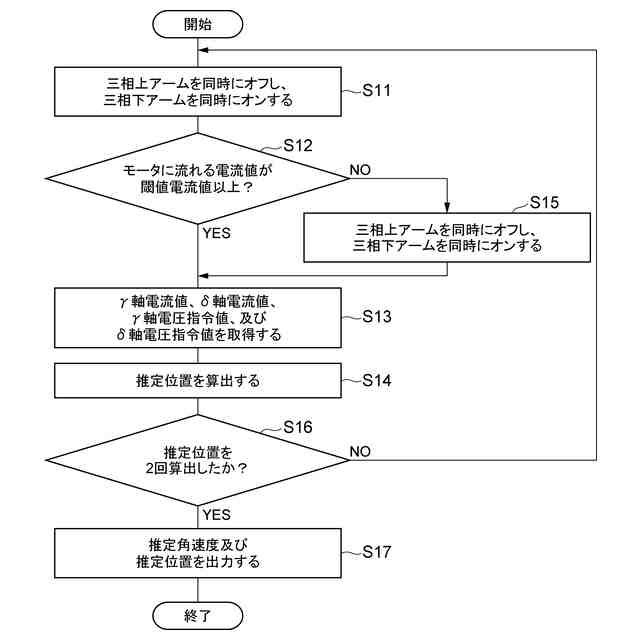
前記駆動信号出力部は、再起動要求を受けた場合又は前記モータが低速で回転していると判定された場合、前記インバータの三相の上アームのスイッチング素子を同時にオンさせるとともに前記インバータの前記三相の下アームのスイッチング素子を同時にオフさせる前記駆動信号である上アーム短絡駆動信号、又は、前記インバータの三相の上アームのスイッチング素子を同時にオフさせるとともに前記インバータの三相の下アームのスイッチング素子を同時にオンさせる前記駆動信号である下アーム短絡駆動信号を生成し、
前記推定部は、前記上アーム短絡駆動信号又は前記下アーム短絡駆動信号によって前記モータに流れる電流から、前記推定位置を零と設定して変換した前記γ軸電流値及び前記δ軸電流値の微分値に基づいて、前記推定位置を算出する、制御装置。
続きを表示(約 370 文字)
【請求項2】
前記推定部は、前記推定位置を零と設定して変換した前記γ軸電流値の微分値をpI
α
、前記推定位置を零と設定して変換した前記δ軸電流値の微分値をpI
β
とした場合に、下記式(5);
θ=tan
-1
(-pI
α
/pI
β
) …(5)
によって前記推定位置を算出する、請求項1に記載の制御装置。
【請求項3】
前記推定部は、前記再起動要求を受けた場合には、式(5)を用いて第1推定位置を算出し、前記第1推定位置を算出してから所定時間が経過したことに応じて、式(5)を用いて第2推定位置を算出し、前記第1推定位置及び前記第2推定位置に基づいて推定角速度を算出する、請求項2に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
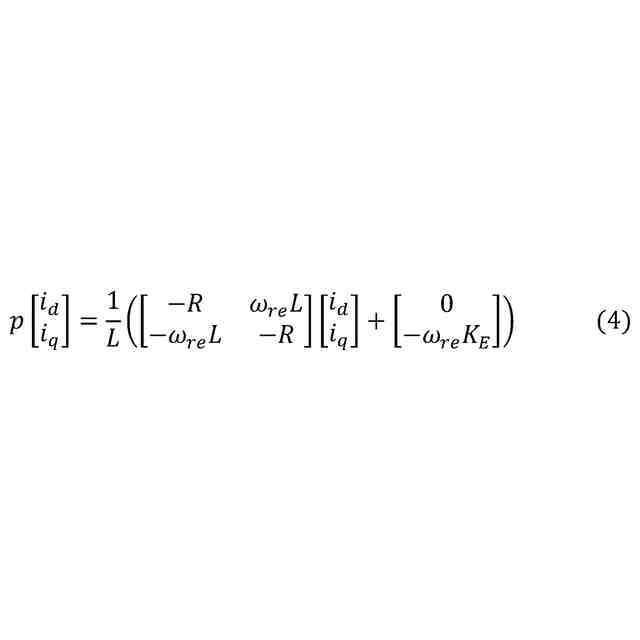
拡張誘起電圧を用いたモータの位置センサレス制御が知られている。例えば、非特許文献1には、フリーラン状態からの再起動直後に、電流指令値を一定時間0に設定することで、励起される拡張誘起電圧を推定し、当該拡張誘起電圧が不足する停止低速域では信号重畳及び極性判定を行い、当該拡張誘起電圧が十分な中高速域では信号重畳を行わずに位置推定を行う再起動アルゴリズムが記載されている。
【先行技術文献】
【非特許文献】
【0003】
小櫻崇雅,道木慎二,“拡張誘起電圧を用いた永久磁石同期モータの位置センサレス制御におけるフリーラン状態からの再起動の検討”,電気学会研究会資料(モータドライブ/回転機/自動車合同研究会),日本,電気学会,2021年5月30日,p.63-68
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に記載の位置推定方法では、全ての条件において精度の高い位置推定ができる訳ではなく、異なる位置推定方法の提案が望まれている。
【0005】
本開示は、位置推定の精度を向上可能な制御装置を説明する。
【課題を解決するための手段】
【0006】
本開示の一側面に係る制御装置は、モータを駆動させるインバータを制御する駆動信号を生成する制御装置である。この制御装置は、モータに流れる電流をγ軸電流値及びδ軸電流値に変換する電流値変換部と、γ軸電流指令値及びδ軸電流指令値を出力するγ-δ電流指令値出力部と、γ軸電流値とγ軸電流指令値とδ軸電流値とδ軸電流指令値とに基づいてγ軸電圧指令値及びδ軸電圧指令値を算出するγ-δ電圧指令値算出部と、γ軸電圧指令値及びδ軸電圧指令値を駆動信号に変換してインバータに出力する駆動信号出力部と、γ軸電流値、δ軸電流値、γ軸電圧指令値及びδ軸電圧指令値に基づいて、モータにおいて生じる拡張誘起電圧の推定値である推定拡張誘起電圧を算出し、推定拡張誘起電圧に基づいてモータの位置の推定値である推定位置を算出する推定部と、を備える。駆動信号出力部は、再起動要求を受けた場合又はモータが低速で回転していると判定された場合、インバータの三相の上アームのスイッチング素子を同時にオンさせるとともにインバータの三相の下アームのスイッチング素子を同時にオフさせる駆動信号である上アーム短絡駆動信号、又は、インバータの三相の上アームのスイッチング素子を同時にオフさせるとともにインバータの三相の下アームのスイッチング素子を同時にオンさせる駆動信号である下アーム短絡駆動信号を生成する。推定部は、上アーム短絡駆動信号又は下アーム短絡駆動信号によってモータに流れる電流から、推定位置を零と設定して変換したγ軸電流値及びδ軸電流値の微分値に基づいて、推定位置を算出する。
【0007】
この制御装置においては、再起動要求を受けた場合又はモータが低速で回転していると判定された場合に、インバータの三相の上アームのスイッチング素子を同時にオンさせるとともにインバータの三相の下アームのスイッチング素子を同時にオフさせるか、あるいは、インバータの三相の上アームのスイッチング素子を同時にオフさせるとともにインバータの三相の下アームのスイッチング素子を同時にオンさせる。このため、実電圧値及び電圧指令値をゼロにできるので、電圧誤差を無くすことができる。加えて、推定位置を零と設定して変換した二軸の電流値の微分値に基づいて推定位置を算出するので、電流センサにおけるオフセット誤差の影響を低減させることができる。その結果、位置推定の精度を向上させることが可能となる。
【0008】
推定部は、推定位置を零と設定して変換したγ軸電流値の微分値をpI
α
、推定位置を零と設定して変換したδ軸電流値の微分値をpI
β
とした場合に、下記式(5);
θ=tan
-1
(-pI
α
/pI
β
) …(5)
によって推定位置を算出してもよい。この場合、推定位置の計算を簡単化することができるとともに、算出される推定位置における電流センサにおけるオフセット誤差の影響を低減させることができる。
【0009】
推定部は、再起動要求を受けた場合には、式(5)を用いて第1推定位置を算出し、第1推定位置を算出してから所定時間が経過したことに応じて、式(5)を用いて第2推定位置を算出し、第1推定位置及び第2推定位置に基づいて推定角速度を算出してもよい。この場合、精度良く算出された2つの推定位置から推定角速度が算出される。したがって、再起動後における推定角速度の算出精度を向上させることが可能となる。
【発明の効果】
【0010】
本開示によれば、位置推定の精度を向上させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カヤバ株式会社
制御装置
1日前
株式会社東光高岳
充電器
3日前
東洋アルミニウム株式会社
発電体
2日前
株式会社ダイヘン
充電装置
2日前
株式会社デンソー
回転電機
7日前
株式会社ダイヘン
送配電装置
7日前
ローム株式会社
半導体集積回路
14日前
本田技研工業株式会社
回転電機
9日前
富士電機株式会社
電力変換装置
7日前
株式会社不二越
空冷式油圧装置
7日前
富士電機株式会社
電力変換装置
7日前
株式会社東光高岳
充電対象切換システム
3日前
株式会社TMEIC
制御装置
15日前
株式会社日立製作所
回転電機
14日前
矢崎総業株式会社
給電装置
15日前
アズビル株式会社
タービン式流量制御装置
2日前
株式会社イノコンバンク
無線給電システム
7日前
株式会社大林組
電力管理用制御装置
1日前
株式会社土井製作所
ケーブル保護管路
14日前
株式会社TMEIC
電力変換装置
15日前
株式会社デンソー
電子制御装置
1日前
サンデン株式会社
モータ
8日前
西芝電機株式会社
緊急切断方法及び軸発電機
3日前
株式会社TMEIC
電力変換装置
1日前
サンデン株式会社
モータ
8日前
トヨタ自動車株式会社
制御装置
1日前
矢崎総業株式会社
電気接続箱
9日前
ジヤトコ株式会社
治具
7日前
株式会社日立産機システム
回転電機
14日前
多摩川精機株式会社
モータ
7日前
ローム株式会社
半導体装置
14日前
ローム株式会社
半導体装置
14日前
Astemo株式会社
充電制御装置
14日前
日本発條株式会社
コアの製造方法及び装置
7日前
河村電器産業株式会社
車両充電装置
7日前
トヨタ紡織株式会社
電動モータ
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ