TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025168663
公報種別
公開特許公報(A)
公開日
2025-11-11
出願番号
2025073153
出願日
2025-04-25
発明の名称
連続生産品の見本に関するシステマティックな公差確定
出願人
ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
ROBERT BOSCH GMBH
代理人
個人
,
個人
,
個人
,
個人
主分類
B62D
6/00 20060101AFI20251104BHJP(鉄道以外の路面車両)
要約
【課題】ステアバイワイヤ・ステアリングシステムまたは高度自動運転用のステアリングシステムに関する製品のシミュレーションモデルの目標パラメータサンプルの周りの運行設計領域(ODD)内の公差領域を確定する
【解決手段】多数のペアのそれぞれのペアで非類似度メトリックを計算するステップを含み、それぞれのペアが、目標パラメータサンプルに割り当てられたパラメータ化されたシミュレーションモデルと、多数のパラメータ化されたシミュレーションモデルのそれぞれ1つのパラメータ化されたシミュレーションモデルとを含み、ペアごとに1つの距離が生じ、これにより多数の距離が生じ;任意選択で、非類似度メトリックが、gapメトリック、ν-gapメトリック、またはL2メトリックをベースとし;かつ多数の距離および最大許容可能距離をベースとして、目標パラメータサンプルの周りのODD内の公差領域を決定するステップを含む、方法。
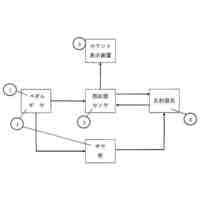
【選択図】図1
特許請求の範囲
【請求項1】
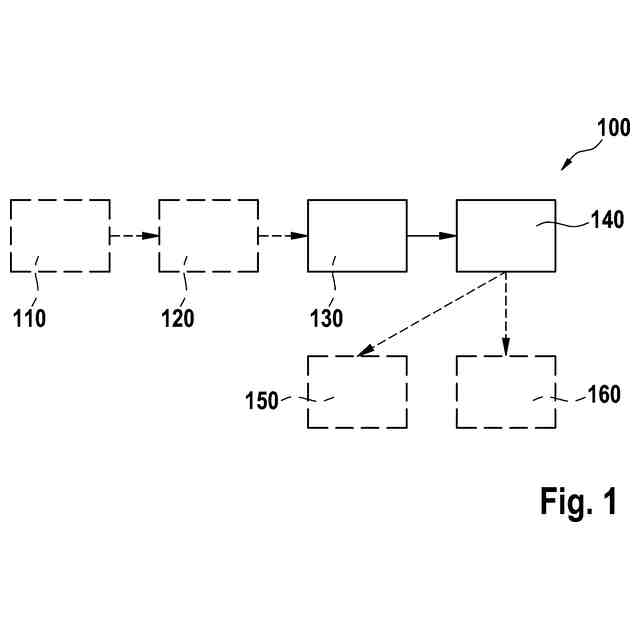
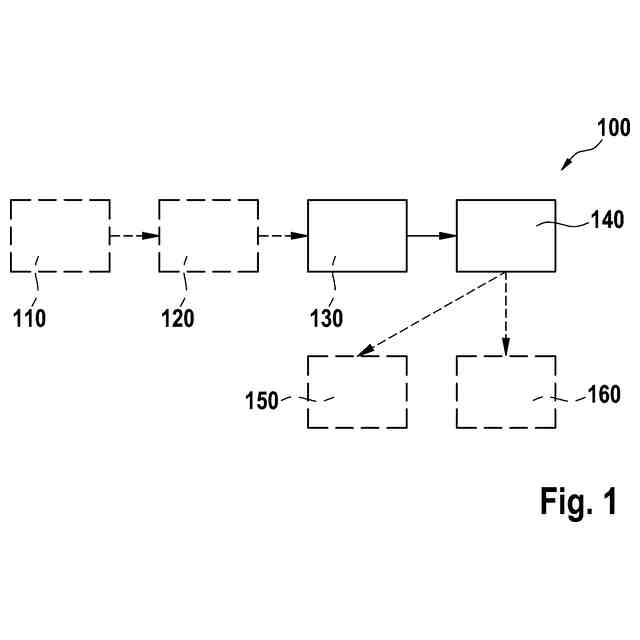
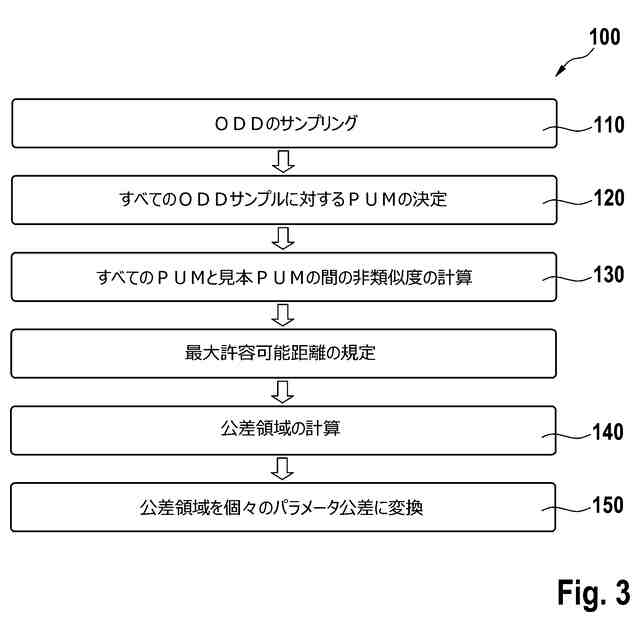
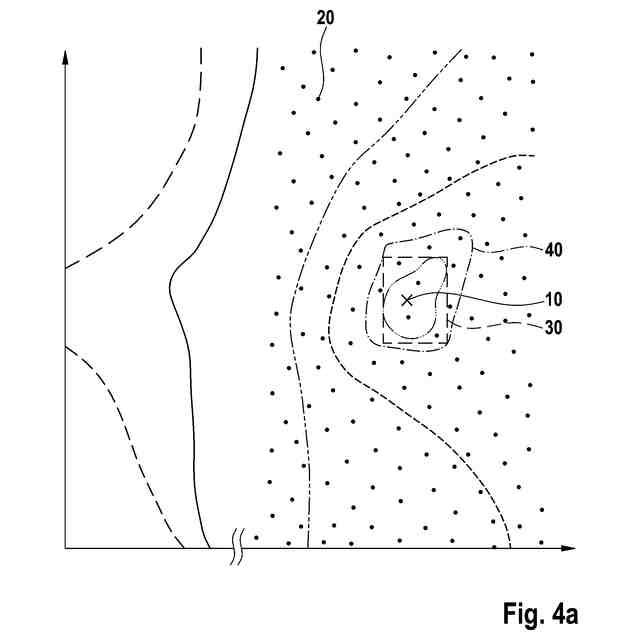
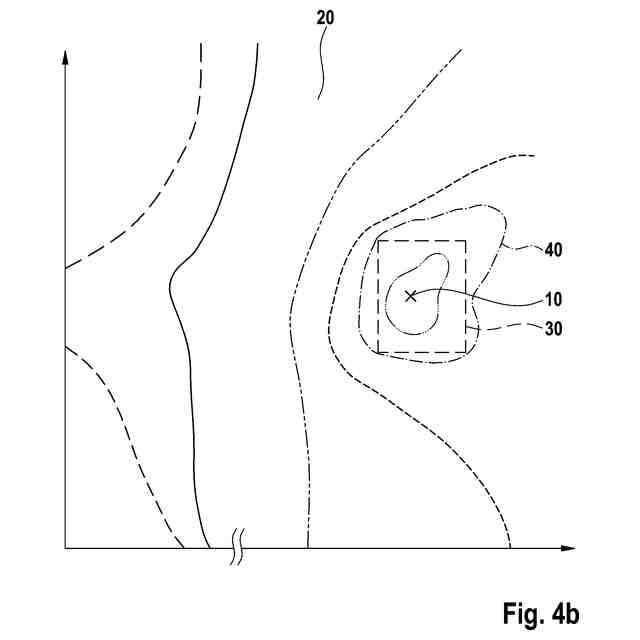
とりわけステアバイワイヤ・ステアリングシステムおよび/または高度自動運転用のステアリングシステムの、製品についてのパラメータ化可能なシミュレーションモデルの目標パラメータサンプル(10)の周りの運行設計領域(ODD)内の公差領域(30)を確定するためのコンピュータ実装された方法(100)であって、
- 多数のペアのうちのそれぞれのペアで非類似度メトリックを計算(130)するステップを含み、これに関し、それぞれのペアが、前記目標パラメータサンプル(10)に割り当てられたパラメータ化されたシミュレーションモデルと、多数のパラメータ化されたシミュレーションモデルのそれぞれ1つのパラメータ化されたシミュレーションモデルとを含み、ペアごとに1つの距離が結果として生じ、これにより多数の距離が結果として生じ;任意選択で、前記非類似度メトリックが、gapメトリック、ν-gapメトリック、および/またはL2メトリックをベースとし;
- 前記多数の距離および最大許容可能距離をベースとして、前記目標パラメータサンプル(10)の周りの前記ODD内の前記公差領域(30)を決定(140)するステップを含む、方法(100)。
続きを表示(約 1,900 文字)
【請求項2】
前記目標パラメータサンプル(10)および前記公差領域(30)が、前記製品についての製造されるべき製品見本を定義する、請求項1に記載の方法(100)。
【請求項3】
- 前記目標パラメータサンプル(10)および前記公差領域(30)をベースとして、前記製造されるべき製品見本の生産に対する要件を出力(150)するステップを含み、前記要件は、前記製造されるべき製品見本のパラメータが前記公差領域(30)内にある場合に満たされており;
任意選択で、前記要件が、前記製造されるべき製品見本の前記パラメータが前記公差領域(30)内にあるかどうかを検査し得るアルゴリズムを含む、請求項2に記載の方法(100)。
【請求項4】
前記ODD内の前記公差領域(30)の前記決定(140)が、前記公差領域(30)内では前記目標パラメータサンプル(10)に割り当てられた前記パラメータ化されたシミュレーションモデルに対する各距離が前記最大許容可能距離より小さいように行われる、請求項1から3のいずれか一項に記載の方法(100)。
【請求項5】
前記ODD内の前記公差領域(30)の前記決定(140)が、前記公差領域(30)が厳密にまたは近似的に最大であるように行われ、任意選択で、前記公差領域(30)がルベーグ測度をベースとして最大化される、請求項4に記載の方法(100)。
【請求項6】
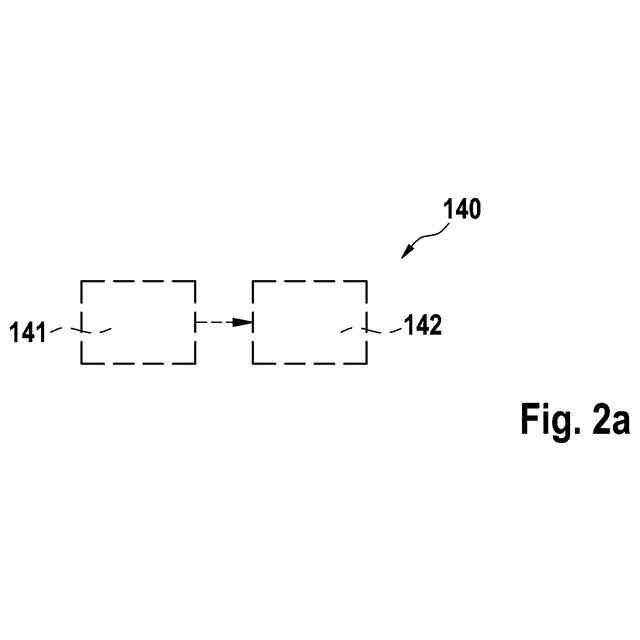
前記ODD内の前記公差領域(30)の前記決定(140)が、
- 前記目標パラメータサンプル(10)に割り当てられた前記パラメータ化されたシミュレーションモデルに対する距離が十分に前記最大許容可能距離に相当する1つまたは複数のパラメータ化されたシミュレーションモデルを選択(141)するステップを含み、
- 前記1つまたは複数の選択(141)されたパラメータ化されたシミュレーションモデルをベースとして、任意選択でポリトープ、とりわけ凸ポリトープ、超楕円体、または超立方体をベースとして、前記公差領域(30)を決定(142)するステップを含む、請求項1から5のいずれか一項に記載の方法(100)。
【請求項7】
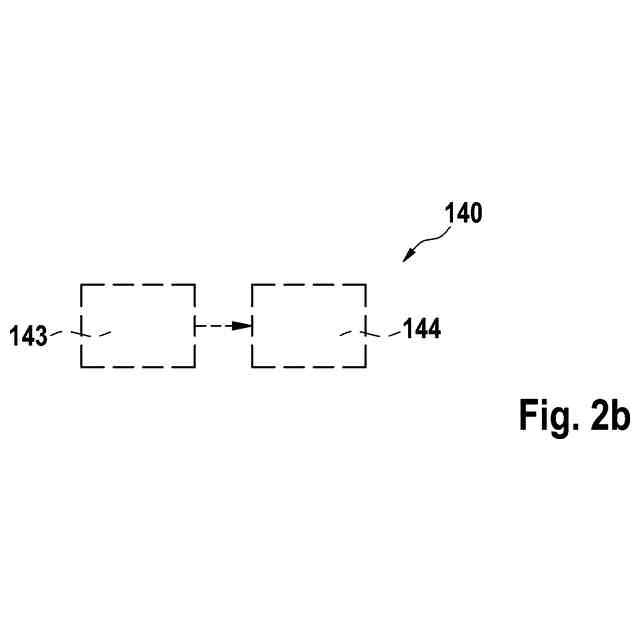
前記ODD内の前記公差領域(30)の前記決定(140)が、
- 前記目標パラメータサンプル(10)に割り当てられた前記パラメータ化されたシミュレーションモデルに対する前記距離を補間(143)し、この場合に前記ODD内の距離写像が結果として生じるステップを含み、
- 前記ODD内の前記距離写像をベースとして、任意選択でポリトープ、とりわけ凸ポリトープ、超楕円体、または超立方体をベースとして、前記公差領域(30)を決定(144)するステップを含む、請求項1から6のいずれか一項に記載の方法(100)。
【請求項8】
前記距離の前記補間(143)がフィット関数をベースとし、そのフィットパラメータがガウス過程によって確定される、請求項7に記載の方法(100)。
【請求項9】
前記目標パラメータサンプル(10)が、前記ODDを代表している多数の目標パラメータサンプルからの1つである、請求項1から8のいずれか一項に記載の方法(100)。
【請求項10】
- 前記製品に関する前記ODD内の多数のパラメータサンプル(20)を決定(110)するステップを含み、任意選択で、前記ODD内のパラメータサンプルがそれぞれ、前記パラメータ化可能なシミュレーションモデルの1つまたは複数のパラメータを含む、ステップ
- 前記パラメータ化可能なシミュレーションモデルおよび前記ODD内の前記多数のパラメータサンプル(20)をベースとして、前記パラメータ化されたシミュレーションモデルを生成(120)するステップであり、とりわけ、前記パラメータ化可能なシミュレーションモデルが、前記パラメータサンプル(20)のそれぞれで評価され、かつ/または前記パラメータサンプル(20)のそれぞれに対し、前記パラメータ化可能なシミュレーションモデルのためのサロゲートモデルが作成される、ステップ、を含み、
任意選択で、前記ODD内の前記多数のパラメータサンプル(20)の前記決定(110)が、前記ODDが十分に均一にカバーされるように、とりわけ擬似乱数、ラテン超方格サンプリング、および/またはSobolシーケンスをベースとして行われる、請求項1から9のいずれか一項に記載の方法(100)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【背景技術】
【0001】
連続生産品(とりわけ大規模連続生産品)、例えばステアリングシステムは、製造公差および製造誤差に基づいて、例えば摩擦、弾性、および/または慣性のような製品パラメータのばらつきを免れない。連続生産品はさらに、例えば摩耗および/または環境の及ぼす影響による経年劣化に基づく追加的なパラメータのばらつきを免れない。連続生産品の、現実に発生するパラメータのばらつきのすべての値の範囲および値の組合せが、この連続生産品のいわゆる「運行設計領域」(ODD)、ドイツ語では例えば「Betriebsbereich fuer die Auslegung」である。
続きを表示(約 2,300 文字)
【0002】
(連続)生産品のあらゆるシミュレーションモデルでは、ODD全体内のパラメータのばらつきに基づいて、およびモデリング時の単純化により、モデル化された挙動と現実の挙動との間に差異が生じる。ODD全体内のモデル差異および/またはモデル不確実性を含んだこのようなシミュレーションモデルが、シミュレーションベースの製品リリースのための基盤である。これに関して必要となるモデル不確実性の特徴づけは、今日、幾つかの選択された製品プロトタイプに基づいて行われるのが典型的であり、なぜなら全部の特徴づけは一般的に手間がかかりすぎるからである。以下では、プロトタイプの目標バージョン(理想バージョンも)を製品見本、およびその物理的現実化を製品個体と言う。通常は、不確実性を特徴づけるための製品見本の選択は専門家の意見に基づいて行われる。
【0003】
ただし、選択された(理想的な)製品見本の厳密な現実化は、最終的な製造精度に基づいて実際には不可能であり、これにより製品見本とそれに帰属する製品個体は、互いに少しずれたシステム挙動を有する。典型的には、製品見本の現実化に関する受け入れ可能なパラメータ公差が専門知識によって定義される。その代わりに、製品個体のできるだけ正確な製造および/または仕上げが目指され得る。しかしながらこれにより、緩すぎるパラメータ公差が規定および/または確立されることは排除され得ず、それにより製品見本と製品個体の間の著しいシステム挙動差異が生じ得る。他方で厳しすぎるパラメータ公差が規定および/または確立されることも排除され得ず、それにより製品見本と製品個体のシステム挙動は実質的に同一であり得るが、不必要に高い製造費が発生し得る。
【0004】
本開示の基礎になっている解決すべき問題は、例えば、予め定められた製品見本をそのシステム挙動に関して十分に現実化するためには、製品個体がこの製品見本からどのくらい相違してもいいのかを確定する方法を提供することに見出され得る。
【0005】
従来のステアリングに比べて、ステアバイワイヤ(SbW)ステアリングシステムおよび/または高度自動運転(highly automated driving,HAD)用のステアリングシステムは、製品リリースのためのより厳しい規格要件を義務付けられている。(大規模)連続生産されたSbWおよびHADステアリングシステムに対する比較的厳しいリリース要件によって現実のテストおよび検査のコストが従来のステアリングに比べてあまり大きくは増加しないように、この分野ではシミュレーションベースのリリースプロセスに焦点が合わせられている。このようなシミュレーションベースのリリースには、ステアリングシステムのバリデーションされたおよび検証された、既知のモデル不確実性を有するシミュレーションモデルが不可欠である。
【0006】
SbWおよび/またはHADステアリングシステムのための社内のおよびシミュレーションベースのリリースプロセスの枠内で、幾つかの選択された製品個体に基づいてモデル不確実性の特徴づけが行われるべきである。
【0007】
よって目の前に横たわっている解決すべき問題は、それに帰属する製品見本を、モデルベースの基準を使ってシステマティックに選択することにあると言え、したがってこの製品見本は、定量化可能な残存不確実性を有する(大規模)連続生産ステアリングシステムのODD全体を代表する。
【0008】
目下のところ、製品見本の現実化に関して有意義なパラメータ公差を確定し、それによって製品見本と製品個体の間の無視できる定量的なシステム挙動非類似度を保証し、よって過度に厳しいまたは緩い公差が回避されるようなシステマティックな方法は存在しない。
【0009】
システム論では、2つのシステム(以下ではシステムと製品は同等と見なされ得る)の非類似度を定量化し、それによってこれらのシステムを比較する様々なメトリックが知られている。以下に、gapメトリック、ν-gapメトリック、およびL2メトリックを解説する。
【0010】
gapメトリックは、2つのシステムP1およびP2の制御されない(開ループ)入/出力挙動の非類似度を、その制御される動作(閉ループ)での安定特性および性能特性に関連させて、実区間[0,1]内のスケールで定量化する。0に近いメトリック結果は、両方のシステムが非常に似ており、かつあらゆるP1安定化制御器が、似ている制御される性能を有するシステムP2も安定化することを意味する。0のメトリック結果は、考察されているシステムP1およびP2が厳密に同一に挙動することを意味する。他方で1に近いまたは1のメトリック結果は、システムP1およびP2が非常に似ていないことを意味する。さらにgapメトリックにより、モデル不確実性をもつ閉じた制御系のロバスト安定性についての命題が可能である。gapメトリックの評価には、明確な制御器構想が必要である。gapメトリックの定義および特性についての詳細は、本「Essentials of Robust Control(ロバスト制御の必須事項)」、Kemin ZhouおよびJohn C.Doyle著、初版、Pearson、1997、ISBN:9780135258332の第17章に記載されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
4か月前
個人
走行装置
4か月前
個人
三輪バイク
19日前
個人
電動走行車両
4か月前
個人
乗り物
6か月前
個人
折り畳み自転車
11か月前
個人
発音装置
8か月前
個人
自転車用歩数計
27日前
個人
閂式ハンドル錠
4か月前
個人
電動モビリティ
8か月前
個人
駐輪設備
2か月前
個人
ボギー・フレーム
2か月前
個人
“zen-go.”
3か月前
個人
自由方向乗車自転車
8か月前
個人
ルーフ付きトライク
3か月前
個人
体重掛けリフト台車
11か月前
個人
三輪電動車両
27日前
個人
ルーフ付きトライク
2か月前
個人
車の室内高温防止屋根
5日前
個人
自転車用荷物台
12か月前
個人
キャンピングトライク
9か月前
個人
パワーアシスト自転車
2か月前
井関農機株式会社
作業車両
12日前
個人
ステアリングの操向部材
9か月前
株式会社三五
リアサブフレーム
11か月前
株式会社豊田自動織機
産業車両
5か月前
個人
フロントフットブレーキ。
4か月前
個人
乗用自動車のディフューザー
1か月前
学校法人千葉工業大学
車両
10か月前
豊田鉄工株式会社
小型車両
4か月前
学校法人千葉工業大学
車両
10か月前
個人
ホイールハブ駆動構造
5か月前
学校法人千葉工業大学
車両
10か月前
個人
折り畳み作業机搭載の変型台車
2か月前
個人
ハブモーターの配線構造
1か月前
個人
自転車の駐輪場システム
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ