TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025164451
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024068441
出願日
2024-04-19
発明の名称
ヒッチ角推定装置、ヒッチ角推定方法及びプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G06T
7/60 20170101AFI20251023BHJP(計算;計数)
要約
【課題】センサ、マーカ等が含まれない学習用トレーラの画像をヒッチ角の推定に用いられるモデルの学習に用いる。
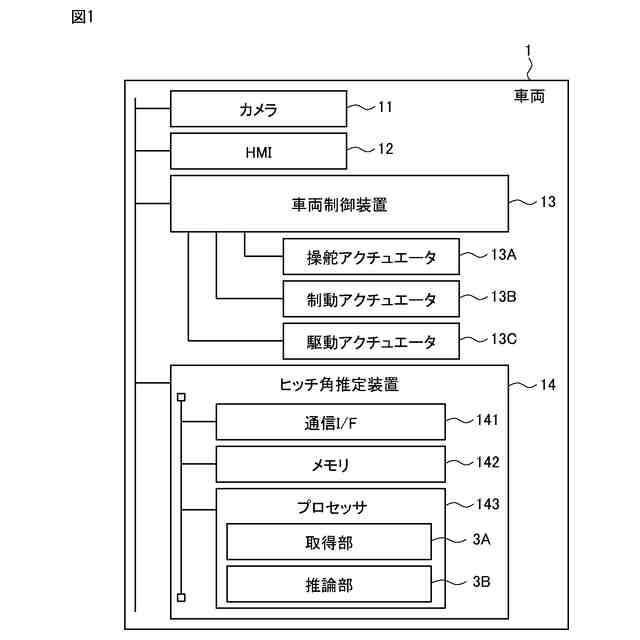
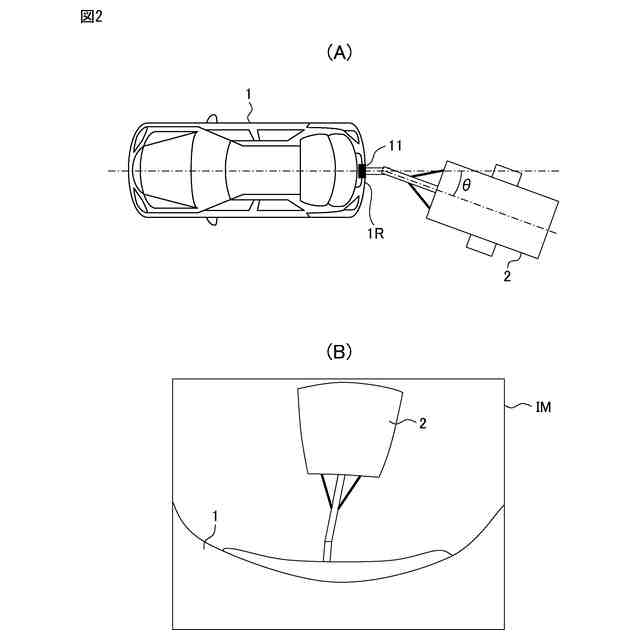
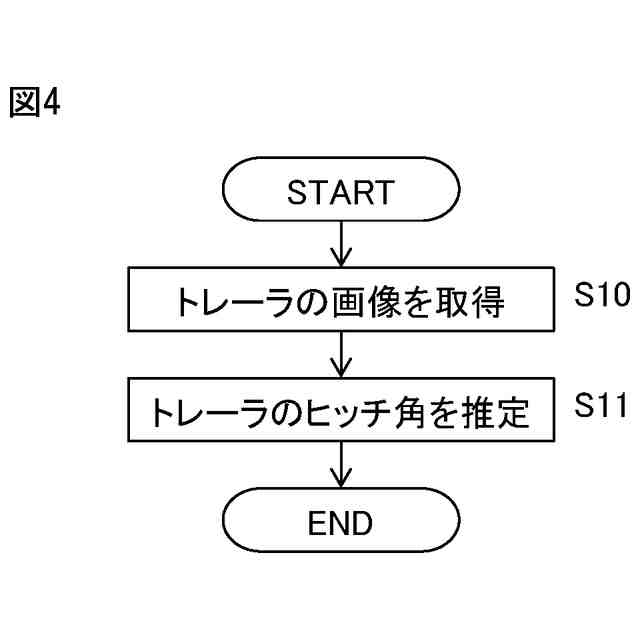
【解決手段】ヒッチ角推定装置14は、トレーラ2を牽引する車両1に搭載されたカメラ11によって撮影されたトレーラ2の画像を取得する取得部3Aと、学習用トレーラを牽引する学習用車両に搭載された学習用カメラによって撮影された学習用トレーラの画像と学習用トレーラのヒッチ角を示すラベルとのデータセットである学習データを用いた学習を行うことによって得られたモデルを用いることにより、取得部3Aによって取得されたトレーラ2の画像に基づいて、トレーラ2のヒッチ角を推定する推論部3Bとを備え、学習用トレーラのヒッチ角として、学習用車両の方位と、学習用トレーラの方位との差が用いられる。
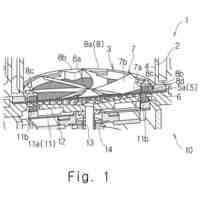
【選択図】図1
特許請求の範囲
【請求項1】
トレーラを牽引する車両に搭載されたカメラによって撮影された前記トレーラの画像を取得する取得部と、
学習用トレーラを牽引する学習用車両に搭載された学習用カメラによって撮影された前記学習用トレーラの画像と前記学習用トレーラのヒッチ角を示すラベルとのデータセットである学習データを用いた学習を行うことによって得られたモデルを用いることにより、前記取得部によって取得された前記トレーラの画像に基づいて、前記トレーラのヒッチ角を推定する推論部とを備え、
前記学習用トレーラのヒッチ角として、前記学習用車両に搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用車両の方位と、前記学習用トレーラに搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用トレーラの方位との差が用いられる、
ヒッチ角推定装置。
続きを表示(約 840 文字)
【請求項2】
ヒッチ角推定装置が、トレーラを牽引する車両に搭載されたカメラによって撮影された前記トレーラの画像を取得する取得ステップと、
前記ヒッチ角推定装置が、学習用トレーラを牽引する学習用車両に搭載された学習用カメラによって撮影された前記学習用トレーラの画像と前記学習用トレーラのヒッチ角を示すラベルとのデータセットである学習データを用いた学習を行うことによって得られたモデルを用いることにより、前記取得ステップにおいて取得された前記トレーラの画像に基づいて、前記トレーラのヒッチ角を推定する推論ステップとを備え、
前記学習用トレーラのヒッチ角として、前記学習用車両に搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用車両の方位と、前記学習用トレーラに搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用トレーラの方位との差が用いられる、
ヒッチ角推定方法。
【請求項3】
プロセッサに、
トレーラを牽引する車両に搭載されたカメラによって撮影された前記トレーラの画像を取得する取得ステップと、
学習用トレーラを牽引する学習用車両に搭載された学習用カメラによって撮影された前記学習用トレーラの画像と前記学習用トレーラのヒッチ角を示すラベルとのデータセットである学習データを用いた学習を行うことによって得られたモデルを用いることにより、前記取得ステップにおいて取得された前記トレーラの画像に基づいて、前記トレーラのヒッチ角を推定する推論ステップとを実行させるためのプログラムであって、
前記学習用トレーラのヒッチ角として、前記学習用車両に搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用車両の方位と、前記学習用トレーラに搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用トレーラの方位との差が用いられる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ヒッチ角推定装置、ヒッチ角推定方法及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、DNN(ディープニューラルネットワーク)が牽引車両の前後軸とトレーラの前後軸との間の角度差を計算可能である旨が記載されている。
【先行技術文献】
【特許文献】
【0003】
特表2020-535077号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1には、DNNの学習時に画像とセットでDNNに学習データとして入力する必要がある学習用トレーラのヒッチ角を得るための手法について記載されていない。仮に、学習用トレーラのヒッチ角を得るためのセンサ、マーカ等が、DNNの学習に用いられる画像に含まれると、DNNの学習が不適切になり、その結果、推論時に、DNNが、センサ、マーカ等を含まない画像に基づいて、トレーラのヒッチ角を適切に推定できないおそれがある。
【0005】
上述した点に鑑み、本開示は、センサ、マーカ等が含まれない適切な学習用トレーラの画像を、ヒッチ角の推定に用いられるモデルの学習に用いることができるヒッチ角推定装置、ヒッチ角推定方法及びプログラムを提供することを目的とする。
である。
【課題を解決するための手段】
【0006】
(1)本開示の一態様は、トレーラを牽引する車両に搭載されたカメラによって撮影された前記トレーラの画像を取得する取得部と、学習用トレーラを牽引する学習用車両に搭載された学習用カメラによって撮影された前記学習用トレーラの画像と前記学習用トレーラのヒッチ角を示すラベルとのデータセットである学習データを用いた学習を行うことによって得られたモデルを用いることにより、前記取得部によって取得された前記トレーラの画像に基づいて、前記トレーラのヒッチ角を推定する推論部とを備え、前記学習用トレーラのヒッチ角として、前記学習用車両に搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用車両の方位と、前記学習用トレーラに搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用トレーラの方位との差が用いられる、ヒッチ角推定装置である。
【0007】
(2)本開示の一態様は、ヒッチ角推定装置が、トレーラを牽引する車両に搭載されたカメラによって撮影された前記トレーラの画像を取得する取得ステップと、前記ヒッチ角推定装置が、学習用トレーラを牽引する学習用車両に搭載された学習用カメラによって撮影された前記学習用トレーラの画像と前記学習用トレーラのヒッチ角を示すラベルとのデータセットである学習データを用いた学習を行うことによって得られたモデルを用いることにより、前記取得ステップにおいて取得された前記トレーラの画像に基づいて、前記トレーラのヒッチ角を推定する推論ステップとを備え、前記学習用トレーラのヒッチ角として、前記学習用車両に搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用車両の方位と、前記学習用トレーラに搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用トレーラの方位との差が用いられる、ヒッチ角推定方法である。
【0008】
(3)本開示の一態様は、プロセッサに、トレーラを牽引する車両に搭載されたカメラによって撮影された前記トレーラの画像を取得する取得ステップと、学習用トレーラを牽引する学習用車両に搭載された学習用カメラによって撮影された前記学習用トレーラの画像と前記学習用トレーラのヒッチ角を示すラベルとのデータセットである学習データを用いた学習を行うことによって得られたモデルを用いることにより、前記取得ステップにおいて取得された前記トレーラの画像に基づいて、前記トレーラのヒッチ角を推定する推論ステップとを実行させるためのプログラムであって、前記学習用トレーラのヒッチ角として、前記学習用車両に搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用車両の方位と、前記学習用トレーラに搭載されたGPS受信機が受信したGPS信号に基づいて算出された前記学習用トレーラの方位との差が用いられる、プログラムである。
【発明の効果】
【0009】
本開示によれば、センサ、マーカ等が含まれない適切な学習用トレーラの画像を、ヒッチ角の推定に用いられるモデルの学習に用いることができる。
【図面の簡単な説明】
【0010】
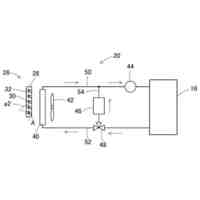
第1実施形態のヒッチ角推定装置が適用された車両の一例を示す図である。
図1に示す車両とトレーラとの関係の一例を示す図である。
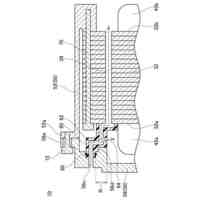
推論部によって用いられるモデルを得るために用いられる学習用車両及び学習用トレーラの一例を示す図である。
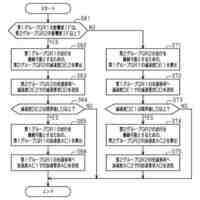
第1実施形態のヒッチ角推定装置において実行される処理の一例を説明するためのフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
治具
7日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
方法
12日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
モータ
9日前
トヨタ自動車株式会社
サーバ
9日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
電池装置
8日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
路側装置
12日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
濾過装置
今日
トヨタ自動車株式会社
塗工装置
12日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
電源装置
7日前
トヨタ自動車株式会社
固体電池
9日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
固体電解質
9日前
トヨタ自動車株式会社
全固体電池
6日前
トヨタ自動車株式会社
密閉型電池
8日前
トヨタ自動車株式会社
電池パック
6日前
トヨタ自動車株式会社
サーバ装置
6日前
トヨタ自動車株式会社
車両下部構造
6日前
トヨタ自動車株式会社
情報処理装置
6日前
トヨタ自動車株式会社
車両用シート
6日前
トヨタ自動車株式会社
情報処理装置
6日前
トヨタ自動車株式会社
車両前部構造
6日前
トヨタ自動車株式会社
車両後部構造
6日前
トヨタ自動車株式会社
情報処理装置
6日前
トヨタ自動車株式会社
電池システム
7日前
トヨタ自動車株式会社
情報処理装置
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ