TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025160923
公報種別
公開特許公報(A)
公開日
2025-10-23
出願番号
2025111243,2022099734
出願日
2025-07-01,2020-11-05
発明の名称
ロボット搭載移動装置
出願人
DMG森精機株式会社
代理人
弁理士法人タス・マイスター
主分類
B25J
13/08 20060101AFI20251016BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】工作機械内で対象物に作用する動作を行うロボットの位置を精度良く設定する。
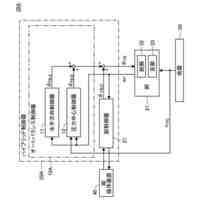
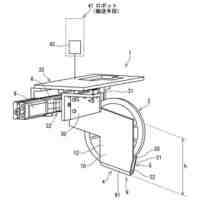
【解決手段】第1装置位置と異なる第2装置位置において、カメラで識別画像が撮像された際の識別図形の位置である第2識別位置に基づいて、第2識別位置が第2装置位置から所定の範囲内にある場合には、ハンド部の位置を調整し、第2識別位置が前記第2装置位置から所定の範囲外にある場合には、前記移動部を移動させ前記移動部の位置を調整する。
【選択図】図1
特許請求の範囲
【請求項1】
工作機械の水平面と交差する面に配された識別図形の情報をもとに対象物を把持する動作を行うロボットを搭載したロボット搭載移動装置であって、
(i)前記対象物を把持するためのハンド部と、(ii)前記ハンド部を可動可能に繋いでいる第2アーム部と、(iii)前記第2アーム部を可動可能に繋いでいる第1アーム部と、(iv)前記第1アーム部とは反対側の前記ハンド部側に設けられたカメラと、を有するロボットと、
前記ロボットが搭載され移動可能な移動部と、
前記ロボット搭載移動装置が前記工作機械の加工領域を開閉するドアの前の所定位置にある際に、前記ロボットのハンド部に前記工作機械内にある対象物を把持する動作を行わせる制御部と、を備え、
前記制御部は、(a)前記所定位置において、前記ロボットの姿勢を、前記工作機械の水平面と交差する面に配された識別図形に対して前記カメラが対向する位置となる撮像姿勢にし、(b)前記撮像姿勢で、前記識別図形を前記カメラで撮像させ、(c)撮像された前記識別図形の情報をもとに前記ロボットのハンド部の位置を調整し、前記ロボットに前記工作機械内にある対象物を把持する動作を行わせる、ロボット搭載移動装置。
続きを表示(約 64 文字)
【請求項2】
前記識別図形は、前記工作機械の水平面と直交する面に配される、請求項1記載のロボット搭載移動装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、対象物に対して作用するハンド部を有するロボットと、このロボットを搭載して所定の作業位置に移動する移動部と、を備えるロボット搭載移動装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、上述したロボット搭載移動装置を用いたシステムの一例として、特開2017-132002号公報(特許文献1)に開示されたシステムが知られている。このシステムでは、ロボットを搭載した無人搬送車が、工作機械に対して設定された作業位置に移動し、この作業位置において、ロボットにより、工作機械に対してワークの着脱等の作業が実行される。
【0003】
このようなシステムでは、無人搬送車によって移動する一台のロボットにより、複数の工作機械に対して、ワークの着脱等の作業を実施することができるので、工作機械に対してロボットを固定した状態で配設する場合に比べて、工作機械のレイアウトの自由度が増すため、工作機械のレイアウトを、より生産効率を高めることが可能なレイアウトに設定することができる。また、ロボットを固定状態で配設した旧来のシステムに比べて、一台のロボットにより、より多くの工作機械に対して作業を行うことができるので、設備費用の低廉化を図ることができる。
【0004】
その一方、無人搬送車は車輪を用いて自走する構造であるが故に、前記作業位置に停止するその位置決め精度は必ずしも高いものとは言えない。
【0005】
従来、固定状態で配設されたロボットの作業姿勢を補正する技術として、特開2016-221622号公報(特許文献2)に開示されるような位置補正手法が知られている。具体的には、この位置補正手法は、2つの較正用マーカからなる視覚ターゲットを工作機械の外表面に配設し、ロボットの可動部に設けられたカメラにより、前記視覚ターゲットを撮像し、得られた画像と、カメラの位置及び姿勢とを基に、ロボットと工作機械との相対的な位置関係を測定し、測定された位置関係に基づいて、ロボットの作業姿勢を補正するというものである。
【0006】
ロボットが多関節型の場合、ロボットのアーム先端部に設けられる作用部(エンドエフェクタ)の位置は、各関節部を構成するモータの回転によって移動する各アームの姿勢が累積されたものとして定まる。そして、各モータが回転できる当該回転角には構造上の限界があるため、各アームの姿勢によっては、作用部をある方向にはそれ以上動かすことができない、いわゆる、特異点となるところが存在する。例えば、各アームが一直線状に並んだ場合には、その延長線方向には作用部を動かすことができない。また、2つ以上の可動軸が一直線状に並んだときにも、前記作用部を動かすことができない方向が生じる。
【0007】
したがって、自動運転において、無人搬送車を作業位置に位置決めしたときのロボットの作業姿勢を補正する際に、無人搬送車の位置決め誤差量が特異点によって制限される作用部の可動範囲を超えている場合には、ロボットの作業姿勢を補正することができず、従来は、システムがアラーム状態となり、停止した状態となっていた。
【0008】
この点について、図10及び図11に基づいて、より具体的に説明する。尚、図10及び図11では、無人搬送車がX軸-Y軸平面で移動するとし、ティーチング時に無人搬送車を作業位置に位置決めしたときの、X軸-Y軸平面と平行な平面上における、ティーチング時の前記ロボットの作用部の先端(ロボット先端)の位置(目標位置)をPtとし、自動運転時に無人搬送車を作業位置に位置決めしたときの、X軸-Y軸平面と平行な平面上におけるロボット先端の位置(実動作位置)をPaとする。また、無人搬送車の位置決め誤差量をΔXe,ΔYeとし、実動作位置Paを基準としたロボット先端部のX軸及びY軸方向の各可動距離をXc,Ycとする。
【0009】
例えば、図10に示すように、無人搬送車の位置決め誤差量ΔXe,ΔYeのいずれもが、実動作位置Paを基準としたロボット先端部のX軸及びY軸方向の各可動距離Xc,Ycより小さい場合、即ち、補正によってロボット先端部を移動させるべき位置である前記目標位置Ptが2点鎖線で示すロボット先端部の可動領域内にあれば、当該ロボット先端部の実動作位置Paを目標位置Ptに補正することができる(破線の矢印を参照)。
【0010】
一方、図11に示すように、無人搬送車の位置決め誤差量ΔXe,ΔYeの少なくとも一方が、実動作位置Paを基準としたロボット先端部のX軸及びY軸方向の各可動距離Xc,Ycを超える場合(図11に示した例では、ΔXe>Xc)、即ち、補正によってロボット先端部を移動させるべき位置である前記目標位置Ptが2点鎖線で示すロボット先端部の可動領域外にあれば、当該ロボット先端部の実動作位置Paを目標位置Ptに補正することができない(破線の矢印を参照)。
【先行技術文献】
【特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
21日前
トヨタ自動車株式会社
学習装置
6日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社安川電機
ロボット
27日前
川崎重工業株式会社
塗装システム
1か月前
株式会社不二越
垂直多関節ロボット
6日前
株式会社三共コーポレーション
工具保持具
21日前
トヨタ自動車株式会社
ロボットハンド
27日前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社マキタ
電動工具
6日前
学校法人立命館
ロボットハンド制御システム
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
19日前
株式会社マキタ
作業機
1か月前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
株式会社人機一体
有脚ロボット
29日前
株式会社田村製作所
エンドエフェクタ及びロボット装置
19日前
ファナック株式会社
経路データセット生成
29日前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
川崎重工業株式会社
監視システム
1か月前
積水ハウス株式会社
固定ピン保持用アタッチメント
27日前
株式会社マキタ
インパクト工具
1か月前
株式会社ダイヘン
回生ユニット
1か月前
カツデン株式会社
回転工具用治具
1か月前
日本発條株式会社
ケーブルユニット及びその製造方法
19日前
パナソニック株式会社
工具及びカバー
1か月前
NTN株式会社
ピッキング装置およびピッキング方法
1か月前
泰芳機械股分有限公司
コレット収納装置
1か月前
株式会社デンソー
ワーク投入装置
19日前
株式会社秦製作所
ジャック差込口ナット締め用の供回り防止レンチ
7日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ