TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025151674
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053215
出願日
2024-03-28
発明の名称
検知装置及び検知方法
出願人
日野自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01S
7/497 20060101AFI20251002BHJP(測定;試験)
要約
【課題】地面の検出処理の異常を検知する。
【解決手段】
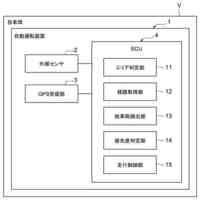
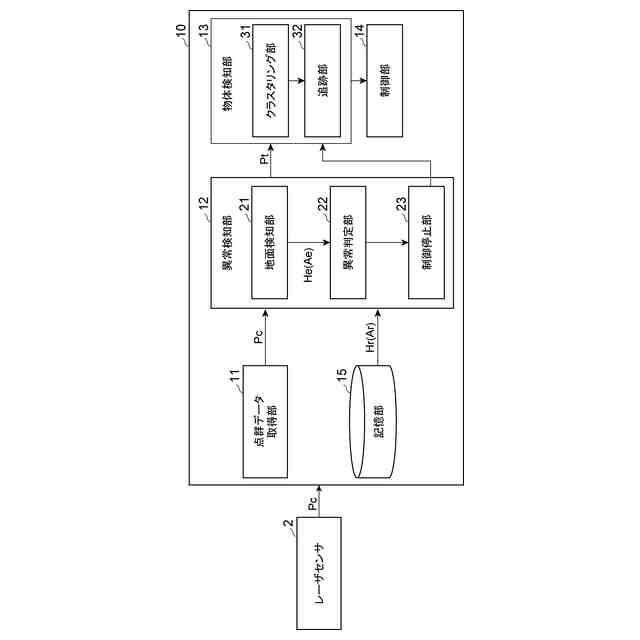
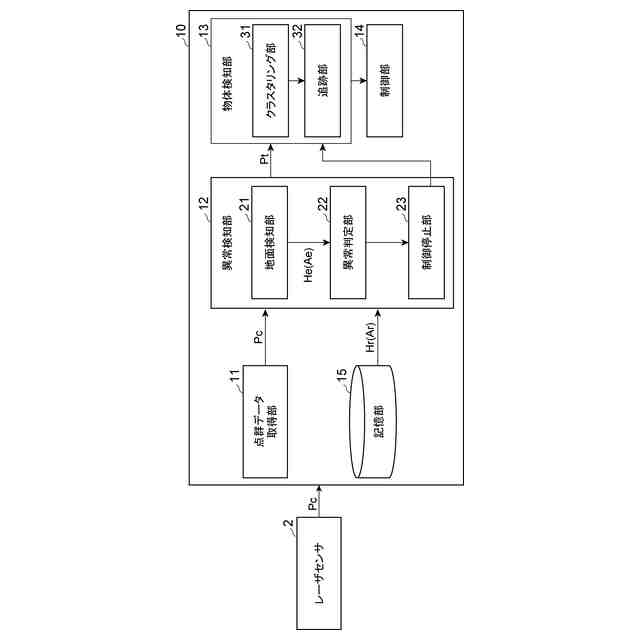
一態様に係る検知装置は、レーザセンサによって生成された点群データを取得する点群データ取得部と、点群データから抽出された地面を示す点群の位置情報に基づいて地面の推定高さを取得する地面検知部と、レーザセンサの設置位置によって定まる基準高さと推定高さとの差の絶対値が閾値よりも大きいときに、レーザセンサを用いた地面の検出処理に異常があると判定する異常判定部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
レーザセンサによって生成された点群データを取得する点群データ取得部と、
前記点群データから抽出された地面を示す点群の位置情報に基づいて地面の推定高さを取得する地面検知部と、
前記レーザセンサの設置位置によって定まる基準高さと前記推定高さとの差の絶対値が閾値よりも大きいときに、前記レーザセンサを用いた地面の検出処理に異常があると判定する異常判定部と、
を備える、検知装置。
続きを表示(約 1,600 文字)
【請求項2】
前記点群データ取得部は、前記レーザセンサである第1レーザセンサによって生成された第1点群データと、前記第1レーザセンサとは別の第2レーザセンサによって生成された第2点群データとを取得し、
前記地面検知部は、前記第1点群データから抽出された地面を示す点群の位置情報に基づいて地面の第1推定高さを取得すると共に、前記第2点群データから抽出された地面を示す点群の位置情報に基づいて地面の第2推定高さを取得し、
前記異常判定部は、前記基準高さと前記第1推定高さとの差の絶対値が第1閾値よりも大きく、且つ、前記第1推定高さと前記第2推定高さとの差の絶対値が第2閾値よりも大きいときに、前記第1レーザセンサを用いた地面の検出処理に異常があると判定する、請求項1に記載の検知装置。
【請求項3】
前記点群データに基づいて物体を検知する物体検知部と、
前記物体の検知結果を用いて車両を制御する制御部と、
前記検出処理に異常があると判定されたときに、前記点群データを用いた車両の制御を停止する制御停止部と、
を更に備える、請求項1又は2に記載の検知装置。
【請求項4】
レーザセンサによって生成された点群データを取得する点群データ取得部と、
前記点群データから抽出された地面を示す点群の位置情報に基づいて地面の推定傾斜角を取得する地面検知部と、
前記レーザセンサの設置姿勢によって定まる基準傾斜角と前記推定傾斜角との差の絶対値が閾値よりも大きいときに、前記レーザセンサを用いた地面の検出処理に異常があると判定する異常判定部と、
を備える、検知装置。
【請求項5】
前記点群データ取得部は、前記レーザセンサである第1レーザセンサによって生成された第1点群データと、前記第1レーザセンサとは別の第2レーザセンサによって生成された第2点群データとを取得し、
前記地面検知部は、前記第1点群データから抽出された地面を示す点群の位置情報に基づいて地面の第1推定傾斜角を取得すると共に、前記第2点群データから抽出された地面を示す点群の位置情報に基づいて地面の第2推定傾斜角を取得し、
前記異常判定部は、前記基準傾斜角と前記第1推定傾斜角との差の絶対値が第1閾値よりも大きく、且つ、前記第1推定傾斜角と前記第2推定傾斜角との差の絶対値が第2閾値よりも大きいときに、前記第1レーザセンサを用いた地面の検出処理に異常があると判定する、請求項4に記載の検知装置。
【請求項6】
前記点群データに基づいて物体を検知する物体検知部と、
前記物体の検知結果を用いて車両を制御する制御部と、
前記検出処理に異常があると判定されたときに、前記点群データを用いた車両の制御を停止する制御停止部と、
を更に備える、請求項4又は5に記載の検知装置。
【請求項7】
レーザセンサによって生成された点群データを取得するステップと、
前記点群データから抽出された地面を示す点群の位置情報に基づいて地面の推定高さを取得するステップと、
前記レーザセンサの設置位置によって定まる基準高さと前記推定高さとの差の絶対値が閾値よりも大きいときに、前記レーザセンサを用いた地面の検出処理に異常があると判定するステップと、
を含む、検知装置。
【請求項8】
レーザセンサによって生成された点群データを取得するステップと、
前記点群データから抽出された地面を示す点群の位置情報に基づいて地面の推定傾斜角を取得するステップと、
前記レーザセンサの設置姿勢によって定まる基準傾斜角と前記推定傾斜角との差の絶対値が閾値よりも大きいときに、前記レーザセンサを用いた地面の検出処理に異常があると判定するステップと、
を含む、検知方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、検知装置及び検知方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、レーザセンサで計測された複数の計測点における計測データを含む点群データを取得し、取得した点群データに基づいて算出される計測点に当てはめられる平面の高さが所定の高さ閾値以下の場合に、当該平面を構成する計測点の計測データを地面上の計測点の計測データとして除去し、計測データが除去された後の点群データをサーバに送信する点群データ収集システムが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-043475号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のように、一般的にレーザセンサを用いた物体検知では、レーザセンサで計測された点群データから地面を示す点群を除去する処理が行われる。地面を示す点群を除去するためには、地面を正確に検出することが要求される。地面を検出する処理に異常がある場合には、地面を示す点群を除去することができず、物体を正確に検出することが困難となる。
【0005】
そこで、本開示では、地面の検出処理の異常を検知することを目的とする。
【課題を解決するための手段】
【0006】
一態様に係る検知装置は、レーザセンサによって生成された点群データを取得する点群データ取得部と、点群データから抽出された地面を示す点群の位置情報に基づいて地面の推定高さを取得する地面検知部と、レーザセンサの設置位置によって定まる基準高さと推定高さとの差の絶対値が閾値よりも大きいときに、レーザセンサを用いた地面の検出処理に異常があると判定する異常判定部と、を備える。
【0007】
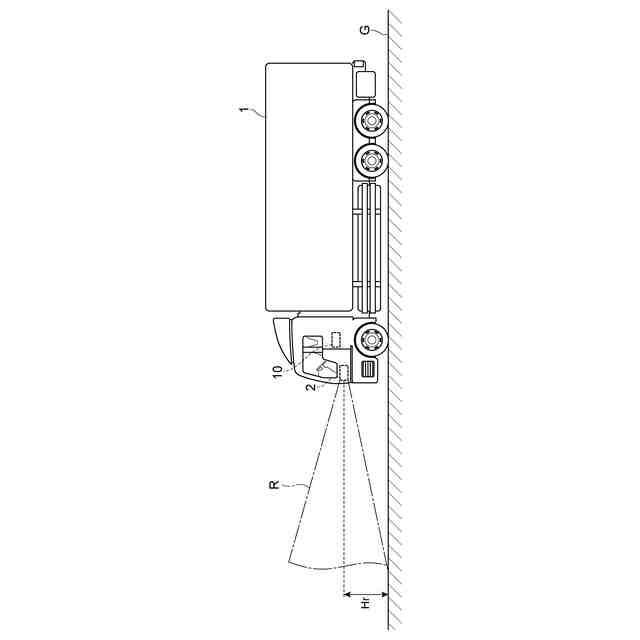
レーザセンサの設置位置は、事前に定められた高さ位置に地面が検出されるように、事前に調整されている。したがって、予め定められた基準高さとレーザセンサを用いて取得された地面の推定高さと差が大きい場合には、地面の推定高さに誤りがある可能性が高い。上記態様に係る検知装置では、基準高さと地面の推定高さとの差が閾値よりも大きいときに、地面の検出処理に異常があると判定しているので、地面の検出処理の異常を効果的に検知することができる。
【0008】
点群データ取得部は、レーザセンサである第1レーザセンサによって生成された第1点群データと、第1レーザセンサとは別の第2レーザセンサによって生成された第2点群データとを取得し、地面検知部は、第1点群データから抽出された地面を示す点群の位置情報に基づいて地面の第1推定高さを取得すると共に、第2点群データから抽出された地面を示す点群の位置情報に基づいて地面の第2推定高さを取得し、異常判定部は、基準高さと第1推定高さとの差の絶対値が第1閾値よりも大きく、且つ、第1推定高さと第2推定高さとの差の絶対値が第2閾値よりも大きいときに、第1レーザセンサを用いた地面の検出処理に異常があると判定してもよい。第1レーザセンサを用いて取得された地面の推定高さと、第2レーザセンサを用いて取得された地面の推定高さとの差が大きい場合には、第1レーザセンサを用いた地面の検出処理に異常がある可能性がある。基準高さと第1推定高さとの差が第1閾値よりも大きく、且つ、第1推定高さと第2推定高さとの差が第2閾値よりも大きいときに、地面の検出処理に異常が発生したと判定することにより、地面の検出処理の異常をより高い精度で検知することができる。
【0009】
検知装置は、点群データに基づいて物体を検知する物体検知部と、物体の検知結果を用いて車両を制御する制御部と、検出処理に異常があると判定されたときに、レーザセンサを用いた車両の制御を停止する制御停止部と、を更に備えていてもよい。地面の検出処理に異常がある場合には、地面を示す点群を除去することができず、物体を正確に検出することができない場合がある。地面の検出処理に異常がある場合に点群データを用いた車両の制御を停止することにより、誤った情報に基づく不適切な車両の制御を防止することができる。
【0010】
別の態様に係る検知装置は、レーザセンサによって生成された点群データを取得する点群データ取得部と、点群データから抽出された地面を示す点群の位置情報に基づいて地面の推定傾斜角を取得する地面検知部と、レーザセンサの設置姿勢によって定まる基準傾斜角と推定傾斜角との差の絶対値が閾値よりも大きいときに、レーザセンサを用いた地面の検出処理に異常があると判定する異常判定部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日野自動車株式会社
走行制御装置
11日前
日野自動車株式会社
自動運転装置
11日前
日野自動車株式会社
ドレンコック
11日前
日野自動車株式会社
障害物検出装置
12日前
日野自動車株式会社
検知装置及び検知方法
11日前
日野自動車株式会社
自己位置ずれ検出装置
12日前
日野自動車株式会社
物体検出装置及び物体検出方法
3日前
日野自動車株式会社
物体検出装置及び物体検出方法
11日前
トヨタ自動車株式会社
情報処理装置
13日前
日野自動車株式会社
自動車の電気部品の配置構造
3日前
トヨタ自動車株式会社
電動車両
1か月前
個人
メジャー文具
13日前
個人
高精度同時多点測定装置
5日前
個人
アクセサリー型テスター
6日前
日本精機株式会社
位置検出装置
19日前
日本精機株式会社
位置検出装置
19日前
ユニパルス株式会社
ロードセル
12日前
日本精機株式会社
位置検出装置
19日前
大和製衡株式会社
組合せ秤
24日前
大和製衡株式会社
組合せ秤
24日前
アズビル株式会社
圧力センサ
18日前
株式会社ヨコオ
ソケット
11日前
エイブリック株式会社
磁気センサ回路
18日前
株式会社ヨコオ
ソケット
12日前
株式会社東芝
センサ
24日前
ダイキン工業株式会社
監視装置
10日前
トヨタ自動車株式会社
検査装置
21日前
株式会社東芝
センサ
24日前
株式会社チノー
放射光測温装置
12日前
トヨタ自動車株式会社
監視装置
11日前
株式会社ユーシン
操作検出装置
21日前
TDK株式会社
ガスセンサ
17日前
長崎県
形状計測方法
6日前
TDK株式会社
ガスセンサ
18日前
東レエンジニアリング株式会社
計量装置
21日前
ローム株式会社
半導体装置
4日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ