TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150073
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024050753
出願日
2024-03-27
発明の名称
モータ装置、ワイパー装置、及びモータ制御方法
出願人
株式会社ミツバ
代理人
個人
,
個人
,
個人
主分類
H02P
6/16 20160101AFI20251002BHJP(電力の発電,変換,配電)
要約
【課題】モータ始動時に負荷がかかっている場合でも、モータの失速を抑制する。
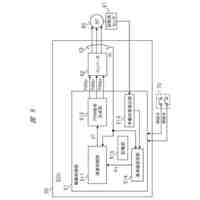
【解決手段】モータ装置は、回転駆動するモータと、前記モータの回転速度を検出する回転速度検出部と、前記モータが加速中か否かを検出する加速検出部と、前記モータを駆動する第1の駆動モードと、前記モータの出力が前記第1の駆動モードよりも高い第2の駆動モードとを切り替える制御を行い、前記モータの始動時に、前記モータが加速中であって、且つ、前記モータの回転速度が、目標値に対して、所定値以上小さい場合に、前記第2の駆動モードを選択する駆動制御部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
回転駆動するモータと、
前記モータの回転速度を検出する回転速度検出部と、
前記モータが加速中であるか否かを検出する加速検出部と、
前記モータを駆動する第1の駆動モードと、前記モータの出力が前記第1の駆動モードよりも高い第2の駆動モードとを切り替える制御を行い、前記モータの始動時に、前記モータが加速中であって、且つ、前記モータの回転速度が、目標値に対して、所定値以上小さい場合に、前記第2の駆動モードを選択する駆動制御部と
を備えるモータ装置。
続きを表示(約 840 文字)
【請求項2】
前記駆動制御部は、前記モータが減速中である場合、又は前記モータの回転速度が、前記目標値に対して、所定値未満小さい場合に、前記第1の駆動モードを選択する
請求項1に記載のモータ装置。
【請求項3】
前記第2の駆動モードが、矩形波駆動方式の駆動モードであり、
前記第1の駆動モードが、前記モータを駆動する複数相の駆動信号線のうち、通電していない相の開放期間に対して、PWM(Pulse Width Modulation)制御により中間電力の駆動信号を出力するフリーレス駆動方式の駆動モードである
請求項1に記載のモータ装置。
【請求項4】
前記モータは、3相の巻線を有するブラシレスモータであり、
前記駆動制御部は、3相の駆動信号を生成するインバータが有する複数のスイッチング素子の導通を、前記第1の駆動モードと、前記第2の駆動モードとで切り替えて制御する
請求項1に記載のモータ装置。
【請求項5】
請求項1から請求項4のいずれか一項に記載のモータ装置を備え、
前記モータ装置を用いて、ワイパー部材にウィンド面での払拭動作を行わせる
ワイパー装置。
【請求項6】
回転駆動するモータを制御するモータ制御方法であって、
回転速度検出部が、前記モータの回転速度を検出する回転速度検出ステップと、
加速検出部が、前記モータが加速中であるか否かを検出する加速検出ステップと、
駆動制御部が、前記モータを駆動する第1の駆動モードと、前記モータの出力が前記第1の駆動モードよりも高い第2の駆動モードとを切り替える制御を行い、前記モータの始動時に、前記モータが加速中であって、且つ、前記モータの回転速度が、目標値に対して、所定値以上小さい場合に、前記第2の駆動モードを選択する駆動制御ステップと
を含むモータ制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ装置、ワイパー装置、及びモータ制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、モータ制御において、負荷の大きさに応じて、例えば、3相通電を行うフリーレス駆動モードと、2相通電を行う矩形波駆動モードとのように、異なる駆動モードに切り替えるモータ制御装置が知られている(例えば、特許文献1を参照)。ここで、フリーレス駆動モードとは、3相のうちOFF相(相開放期間に対応する。以下、フリー相と呼ぶことがある)にDuty(デューティ)の1/2を出力する3相通電の駆動モードであり、同一の電力で駆動した場合に、矩形波駆動モードよりも回転数(回転速度)が低下する低出力の駆動モードである。
特許文献1では、負荷に応じて決定される値であって、負荷を積算した負荷積算値に基づいて、駆動モードの切り替え制御を行っている。
【先行技術文献】
【特許文献】
【0003】
特開2020-48401号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のような従来のモータ制御装置では、例えば、駆動の初期時から高負荷が発生している場合には、負荷がまだ積算されていないため、低出力の駆動モードで駆動され、3相通電のフリーレス駆動モードでは必要なデューティが大きくなる。そのため、従来のモータ制御装置では、2相通電の矩形波駆動モードに比べて、デューティ上限値に到達し易くなり、デューティを上げられずに失速する可能性があった。
【0005】
本発明は、上記問題を解決すべくなされたもので、その目的は、モータ始動時に負荷がかかっている場合でも、モータの失速を抑制することができるモータ装置、ワイパー装置、及びモータ制御方法を提供することにある。
【課題を解決するための手段】
【0006】
上記問題を解決するために、本発明の一態様は、回転駆動するモータと、前記モータの回転速度を検出する回転速度検出部と、前記モータが加速中であるか否かを検出する加速検出部と、前記モータを駆動する第1の駆動モードと、前記モータの出力が前記第1の駆動モードよりも高い第2の駆動モードとを切り替える制御を行い、前記モータの始動時に、前記モータが加速中であって、且つ、前記モータの回転速度が、目標値に対して、所定値以上小さい場合に、前記第2の駆動モードを選択する駆動制御部とを備えるモータ装置である。
【0007】
また、本発明の一態様は、 回転駆動するモータを制御するモータ制御方法であって、回転速度検出部が、前記モータの回転速度を検出する回転速度検出ステップと、加速検出部が、前記モータが加速中であるか否かを検出する加速検出ステップと、前記モータを駆動する第1の駆動モードと、駆動制御部が、前記モータの出力が前記第1の駆動モードよりも高い第2の駆動モードとを切り替える制御を行い、前記モータの始動時に、前記モータが加速中であって、且つ、前記モータの回転速度が、目標値に対して、所定値以上小さい場合に、前記第2の駆動モードを選択する駆動制御ステップとを含むモータ制御方法である。
【発明の効果】
【0008】
本発明によれば、モータ始動時に負荷がかかっている場合でも、モータの失速を抑制することができる。
【図面の簡単な説明】
【0009】
第1の実施形態によるモータ装置の一例を示すブロック図である。
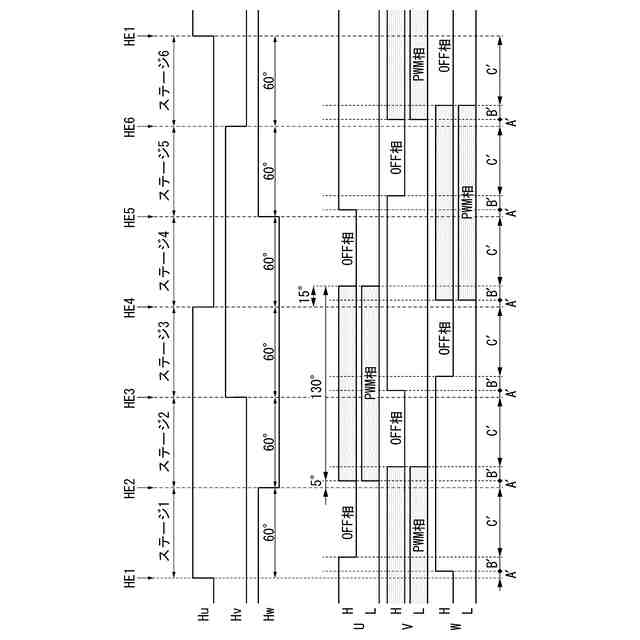
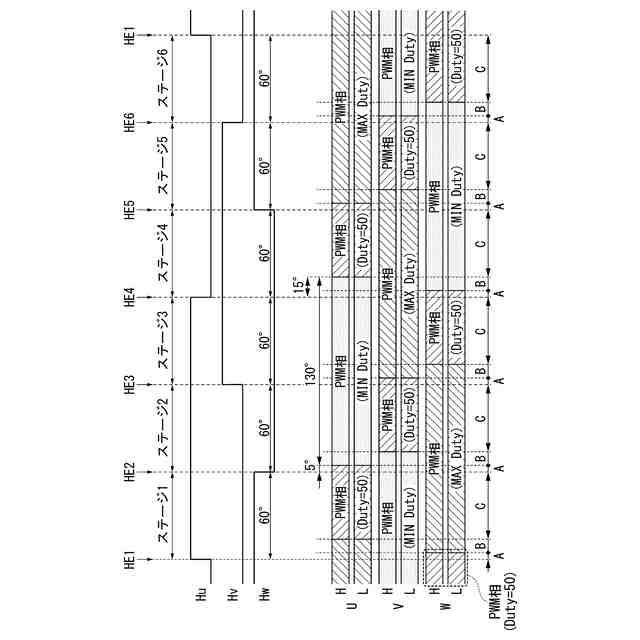
第1の実施形態における矩形波駆動パターンの一例を示す図である。
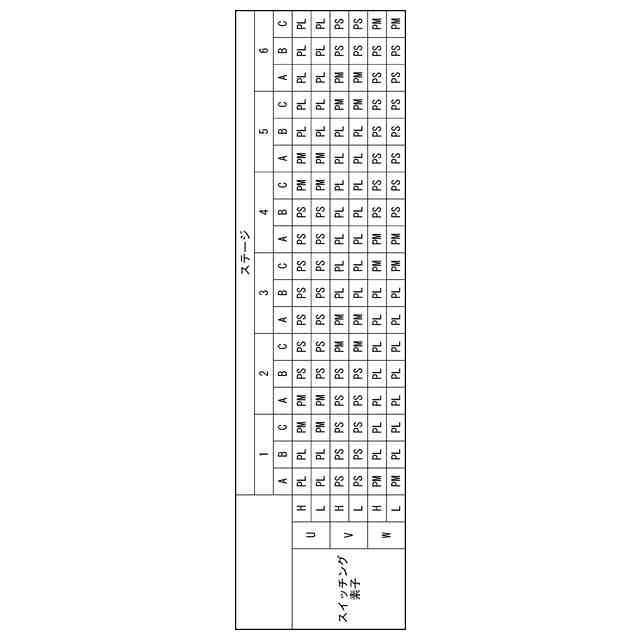
第1の実施形態における矩形波駆動パターンの一例をテーブルにまとめた図である。
第1の実施形態におけるフリーレス駆動パターンの第1の例を示す図である。
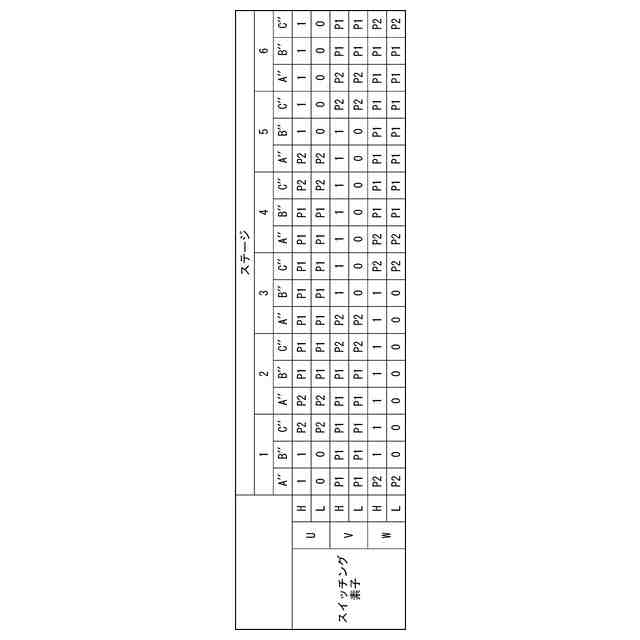
第1の実施形態におけるフリーレス駆動パターンの第1の例をテーブルにまとめた図である。
第1の実施形態におけるフリーレス駆動パターンの第2の例を示す図である。
第1の実施形態におけるフリーレス駆動パターンの第2の例をテーブルにまとめた図である。
第1の実施形態によるモータ装置の駆動モードの切り替え動作の一例を示すフローチャートである。
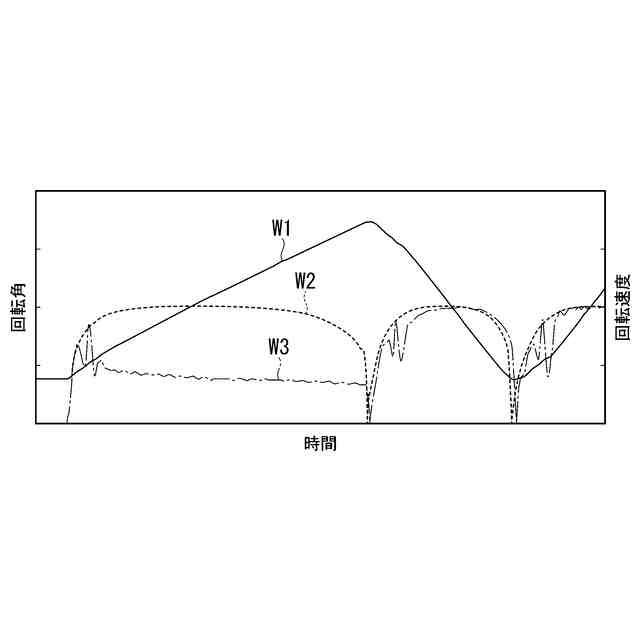
従来のモータ装置の動作の一例を示す図である。
第1の実施形態によるモータ装置の動作の一例を示す図である。
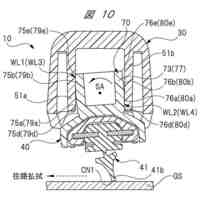
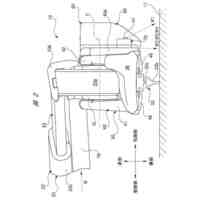
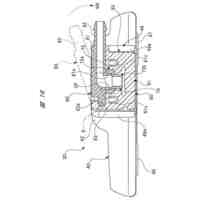
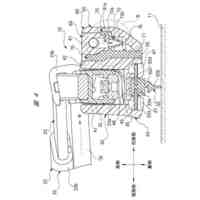
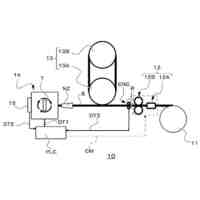
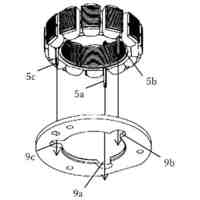
第2の実施形態によるワイパー装置の一例を示す構成図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施形態によるモータ装置、ワイパー装置、及びモータ制御方法について、図面を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ミツバ
ウォーム
3日前
株式会社ミツバ
回転電機
1か月前
株式会社ミツバ
回転電機
1か月前
株式会社ミツバ
ワイパ装置
1か月前
株式会社ミツバ
モータ装置
1か月前
株式会社ミツバ
モータ装置
1か月前
株式会社ミツバ
ワイパ装置
1か月前
株式会社ミツバ
ワイパブレード
1か月前
株式会社ミツバ
ワイパブレード
1か月前
株式会社ミツバ
ワイパブレード
1か月前
株式会社ミツバ
モータ制御装置
1か月前
株式会社ミツバ
モータ制御装置
1か月前
株式会社ミツバ
ブラシレスモータ
1か月前
株式会社ミツバ
モータ及びファン装置
1か月前
株式会社ミツバ
巻線装置、及び、巻線方法
1か月前
株式会社ミツバ
モータシステム及び電動車両
1か月前
株式会社ミツバ
モータ装置およびロータの製造方法
1か月前
株式会社ミツバ
モータ装置、ワイパー装置、及びモータ制御方法
1か月前
株式会社ミツバ
モータ装置、ワイパー装置、及びモータ制御方法
1か月前
個人
単極モータ
1か月前
個人
電気を重力で発電装置
17日前
個人
高圧電気機器の開閉器
4日前
キヤノン電子株式会社
モータ
16日前
キヤノン電子株式会社
モータ
24日前
株式会社アイシン
ロータ
1か月前
株式会社アイシン
ロータ
1か月前
コーセル株式会社
電源装置
25日前
日星電気株式会社
ケーブル組立体
1か月前
トヨタ自動車株式会社
モータ
16日前
株式会社アイドゥス企画
減反モータ
4日前
株式会社デンソー
回転機
1か月前
株式会社アイシン
ステータ
1か月前
株式会社アイシン
ステータ
1か月前
株式会社アイシン
ステータ
1か月前
個人
二次電池繰返パルス放電器用印刷基板
1か月前
株式会社kaisei
発電システム
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ