TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150726
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051768
出願日
2024-03-27
発明の名称
モータシステム及び電動車両
出願人
株式会社ミツバ
代理人
弁理士法人武和国際特許事務所
主分類
B62M
6/45 20100101AFI20251002BHJP(鉄道以外の路面車両)
要約
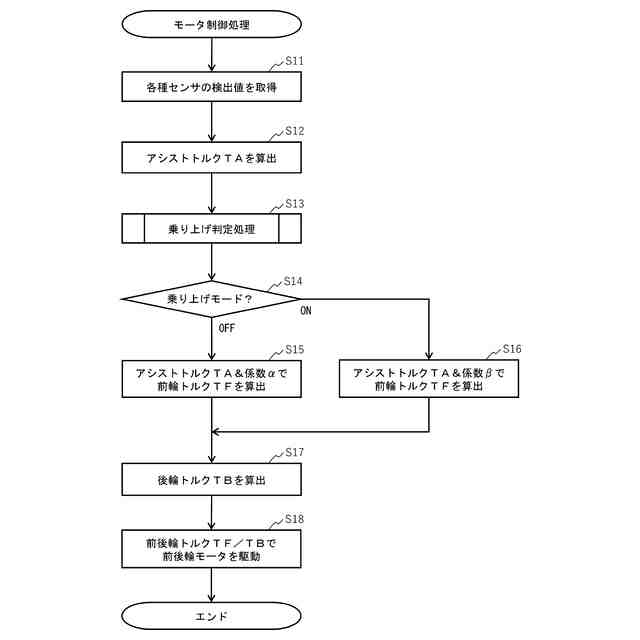
【課題】車両が段差を容易に乗り越えることが可能なモータシステムを提供する。
【解決手段】第1車輪及び第2車輪を備える車両の駆動をアシストするモータシステムは、第1車輪を駆動する第1モータと、第2車輪を駆動する第2モータと、第1モータ及び第2モータのトルクを調整するモータ制御装置とを備える。モータ制御装置は、第1車輪が段差に乗り上げたと判定した場合に、第1車輪が段差に乗り上げる前と比較して、第2モータに対する第1モータのトルクの割合を増加させる乗り上げ制御を実行する。
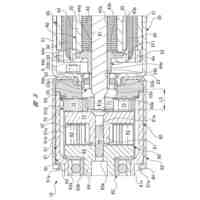
【選択図】図3
特許請求の範囲
【請求項1】
第1車輪及び第2車輪を備える車両の駆動をアシストするモータシステムにおいて、
前記第1車輪を駆動する第1モータと、
前記第2車輪を駆動する第2モータと、
前記第1モータ及び前記第2モータのトルクを調整するモータ制御装置とを備え、
前記モータ制御装置は、前記第1車輪が段差に乗り上げたと判定した場合に、前記第1車輪が段差に乗り上げる前と比較して、前記第2モータに対する前記第1モータのトルクの割合を増加させる乗り上げ制御を実行することを特徴とするモータシステム。
続きを表示(約 790 文字)
【請求項2】
請求項1に記載のモータシステムにおいて、
前記モータ制御装置は、入力部に入力された前記第2車輪を駆動する人力トルクの単位時間当たりの変化量が閾値変化量以上になった場合に、前記乗り上げ制御を実行することを特徴とするモータシステム。
【請求項3】
請求項2に記載のモータシステムにおいて、
前記モータ制御装置は、前記車両の車速が第1閾値速度未満で、前記人力トルクが第1閾値トルク以上で、且つ前記人力トルクの単位時間当たりの変化量が前記閾値変化量以上になった場合に、前記乗り上げ制御を実行することを特徴とするモータシステム。
【請求項4】
請求項3に記載のモータシステムにおいて、
前記モータ制御装置は、前記乗り上げ制御の実行中において、前記車速が第2閾値速度以上で、且つ前記人力トルクが第2閾値トルク未満になった場合に、前記乗り上げ制御を解除することを特徴とするモータシステム。
【請求項5】
請求項4に記載のモータシステムにおいて、
前記第2閾値速度は、前記第1閾値速度より大きく、
前記第2閾値トルクは、前記第1閾値トルクより小さいことを特徴とするモータシステム。
【請求項6】
請求項1に記載のモータシステムにおいて、
前記モータ制御装置は、
前記車両のユーザによって乗り上げ操作部が操作された場合に、前記乗り上げ制御を実行し、
前記乗り上げ制御の実行中に前記ユーザによる前記乗り上げ操作部の操作が終了した場合に、前記乗り上げ制御を解除することを特徴とするモータシステム。
【請求項7】
第1車輪と、第2車輪と、前記第1車輪及び前記第2車輪の駆動をアシストする請求項1に記載のモータシステムとを備える電動車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータシステム及び電動車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、持続可能な開発目標(Sustainable Development Goals、持続可能な開発のための2030アジェンダ、平成27(2015)年9月25日国連サミット採択、以下「SDGs」という)の推進に向けた取り組みが行われている。それに伴い、持続可能な生産消費形態の確保などのため、廃棄物や不良品の削減などを目指す技術が知られている。
【0003】
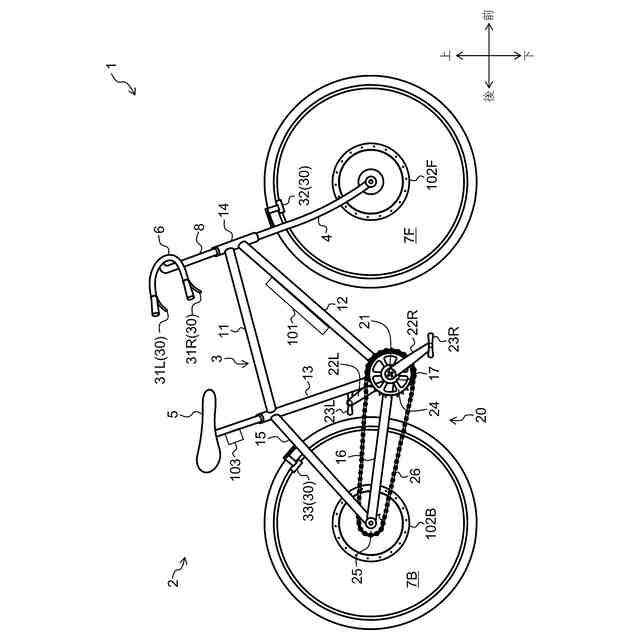
従来より、前輪を駆動する前輪モータと、後輪を駆動する後輪モータとを備える電動アシスト自転車が知られている。また、このような電動アシスト自転車の用途の1つとして、不整地を走行するマウンテンバイクがある。
【0004】
電動アシスト式のマウンテンバイクの走行性能を向上させる技術として、特許文献1には、障害物検出時にモータ駆動力を大きくする技術が開示されている。また、特許文献2には、障害物乗り越え時に前輪と後輪への駆動指令に時間差を設けることで障害物の乗り越えを容易にする技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2023-81345号公報
国際公開第2016/125789号
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1、2は、障害物を乗り越える際にユーザが前輪を持ち上げる操作をすることを前提としている。そのため、特許文献1、2の機能を適切に発揮させるためには、車両の乗車するユーザに熟練の技術が要求される。
【0007】
そこで、本発明の目的は、車両が段差を容易に乗り越えることが可能なモータシステムを提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、本発明は、第1車輪及び第2車輪を備える車両の駆動をアシストするモータシステムにおいて、前記第1車輪を駆動する第1モータと、前記第2車輪を駆動する第2モータと、前記第1モータ及び前記第2モータのトルクを調整するモータ制御装置とを備え、前記モータ制御装置は、前記第1車輪が段差に乗り上げたと判定した場合に、前記第1車輪が段差に乗り上げる前と比較して、前記第2モータに対する前記第1モータのトルクの割合を増加させる乗り上げ制御を実行することを特徴とする。
【発明の効果】
【0009】
本発明によれば、車両が段差を容易に乗り越えることができる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
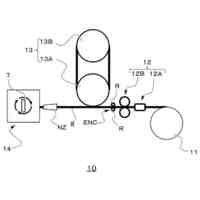
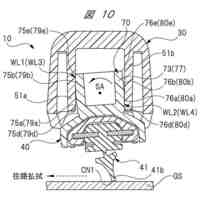
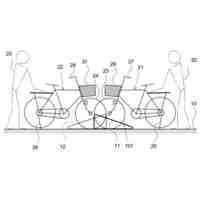
本実施形態に係る電動アシスト自転車の側面図である。
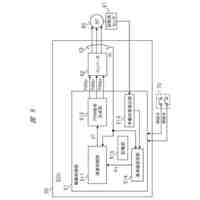
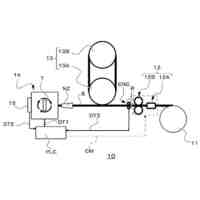
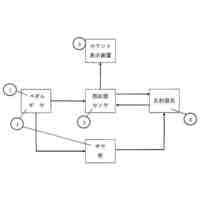
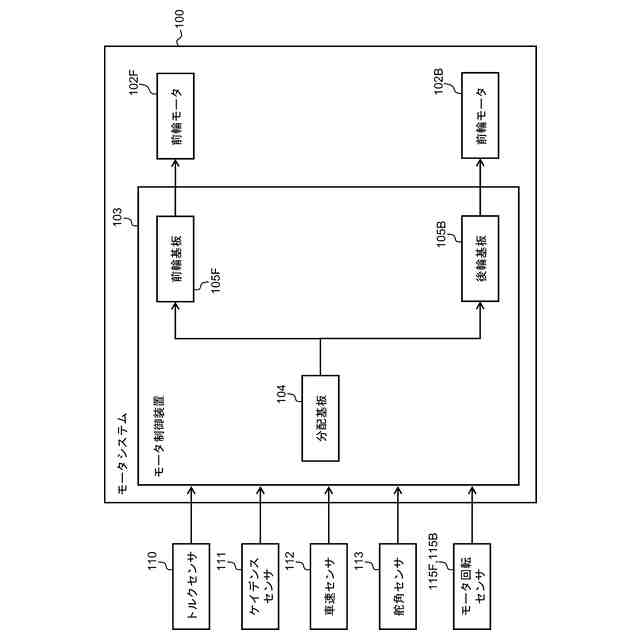
本実施形態に係るモータシステムのブロック図である。
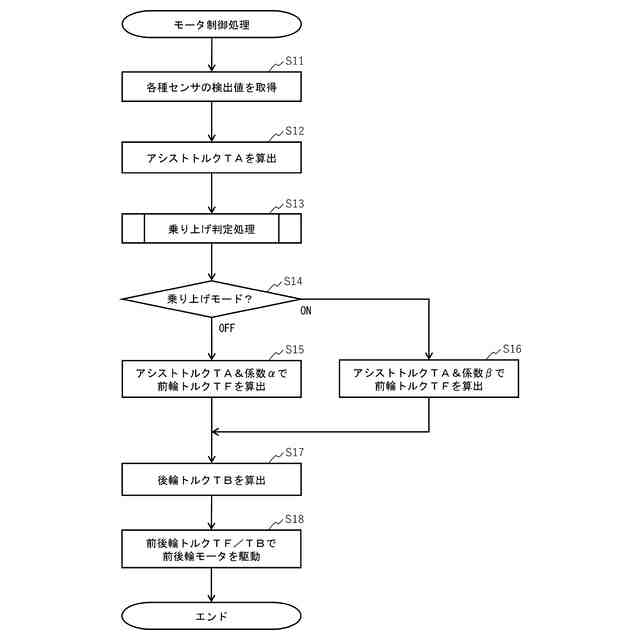
モータ制御処理のフローチャートである。
車速及びアシスト比率の関係の例を示す図である。
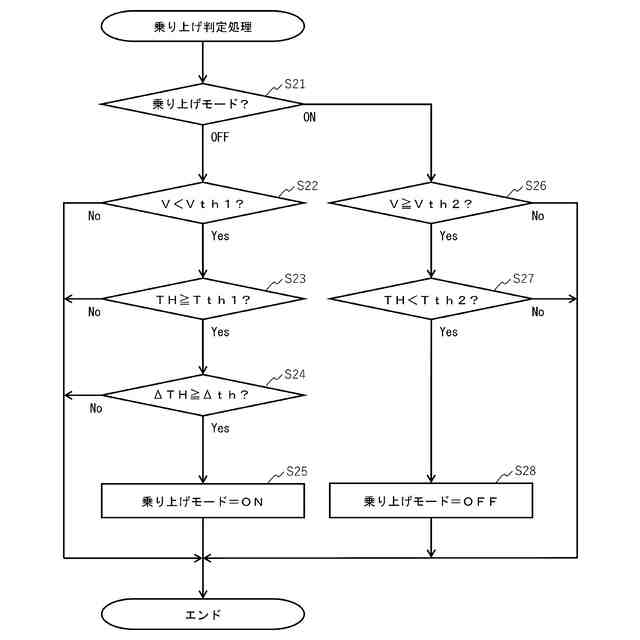
第1実施形態に係る乗り上げ判定処理のフローチャートである。
前輪が段差に乗り上げた前後の人力トルク、車速、乗り上げモード、前輪トルク割合の推移を示す図である。
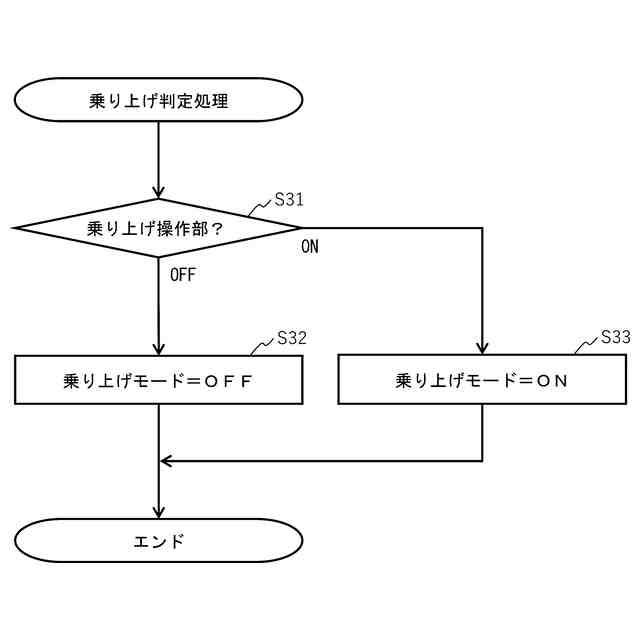
第2実施形態に係る乗り上げ判定処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ミツバ
巻線装置
2か月前
株式会社ミツバ
ウォーム
18日前
株式会社ミツバ
回転電機
1か月前
株式会社ミツバ
回転電機
1か月前
株式会社ミツバ
ワイパ装置
2か月前
株式会社ミツバ
ワイパ装置
2か月前
株式会社ミツバ
モータ装置
3日前
株式会社ミツバ
モータ装置
1か月前
株式会社ミツバ
モータ装置
2か月前
株式会社ミツバ
モータ制御装置
2か月前
株式会社ミツバ
モータ制御装置
2か月前
株式会社ミツバ
ワイパブレード
2か月前
株式会社ミツバ
ワイパブレード
2か月前
株式会社ミツバ
ワイパブレード
2か月前
株式会社ミツバ
ブラシレスモータ
2か月前
株式会社ミツバ
モータ及びファン装置
2か月前
株式会社ミツバ
巻線装置、及び、巻線方法
2か月前
株式会社ミツバ
モータシステム及び電動車両
2か月前
株式会社ミツバ
モータ装置およびロータの製造方法
2か月前
株式会社ミツバ
モータ装置、ワイパー装置、及びモータ制御方法
1か月前
株式会社ミツバ
モータ装置、ワイパー装置、及びモータ制御方法
2か月前
個人
カート
5か月前
個人
走行装置
5か月前
個人
三輪バイク
1か月前
個人
台車
18日前
個人
乗り物
7か月前
個人
電動走行車両
5か月前
個人
閂式ハンドル錠
5か月前
個人
電動モビリティ
9か月前
個人
駐輪設備
3か月前
個人
自転車用歩数計
1か月前
個人
発音装置
9か月前
個人
ボギー・フレーム
3か月前
個人
“zen-go.”
4か月前
個人
ルーフ付きトライク
4か月前
個人
三輪電動車両
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ