TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025147635
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024047981
出願日
2024-03-25
発明の名称
制御装置、制御方法及び飛行体
出願人
本田技研工業株式会社
代理人
弁理士法人桐朋
主分類
B64D
31/16 20240101AFI20250930BHJP(航空機;飛行;宇宙工学)
要約
【課題】電動航空機のロータの制御を適切に行う制御装置を提供する。
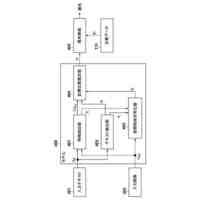
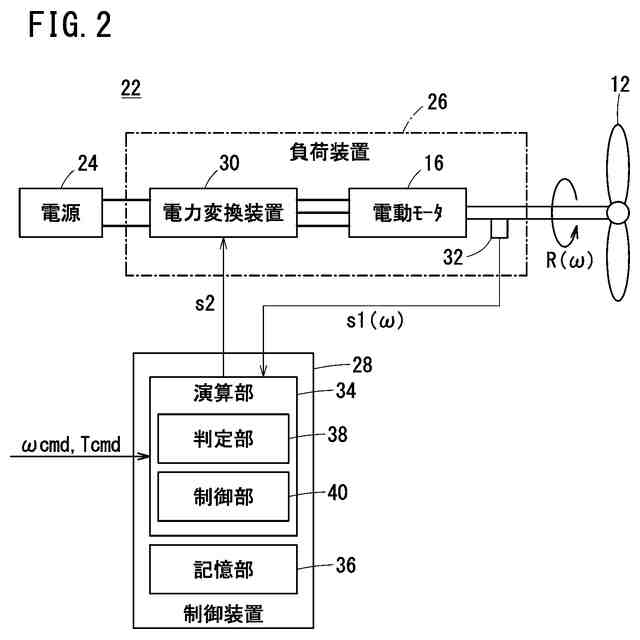
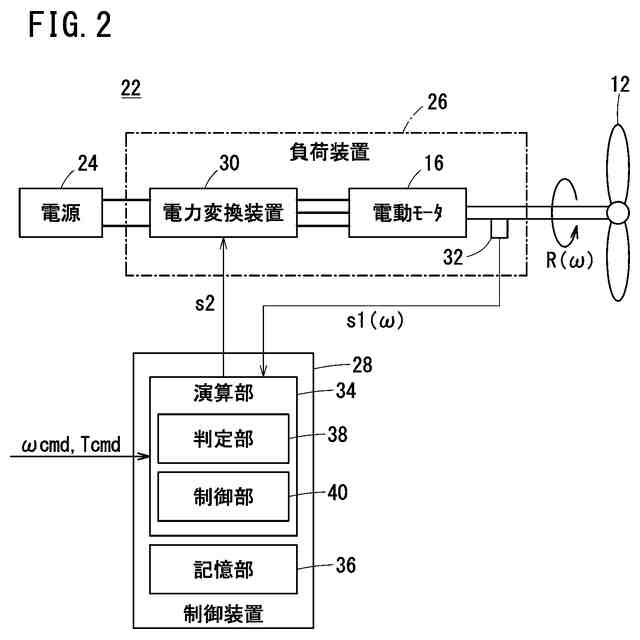
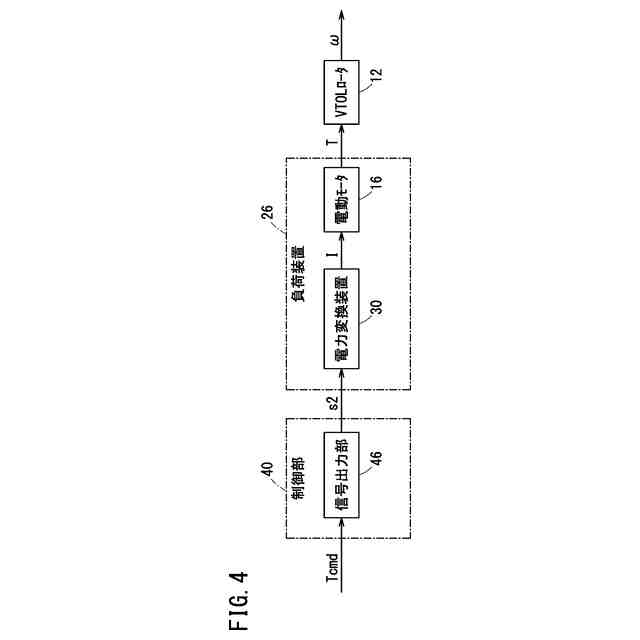
【解決手段】制御装置28は、ロータ12を回転させる電動モータ16を制御する制御装置28であって、ロータ12の回転数であるロータ回転数を目標値に近づけるように電動モータ16を制御する回転数制御と、ロータ回転数にかかわらず一定トルクで電動モータを制御する定トルク制御とのうちのいずれを実行するかを、ロータ回転数に基づいて判定する判定部38と、判定部38の判定結果に基づいて、回転数制御と定トルク制御とのいずれか一方を実行する制御部40と、を備える。
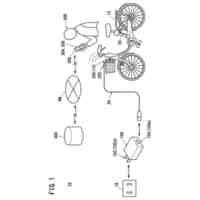
【選択図】図2
特許請求の範囲
【請求項1】
ロータを回転させる電動モータを制御する制御装置であって、
前記ロータの回転数であるロータ回転数を目標値に近づけるように前記電動モータを制御する回転数制御と、前記ロータ回転数にかかわらず一定トルクで前記電動モータを制御する定トルク制御とのうちのいずれを実行するかを、前記ロータ回転数に基づいて判定する判定部と、
前記判定部の判定結果に基づいて、前記回転数制御と前記定トルク制御とのいずれか一方を実行する制御部と、
を備える、制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の制御装置において、
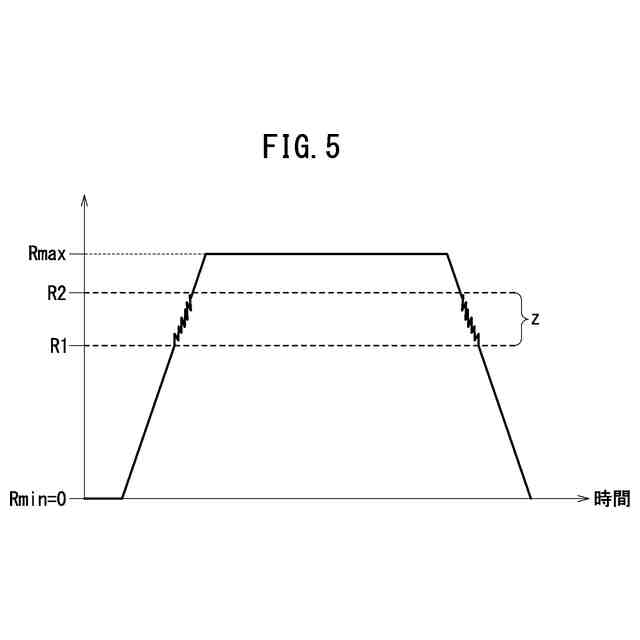
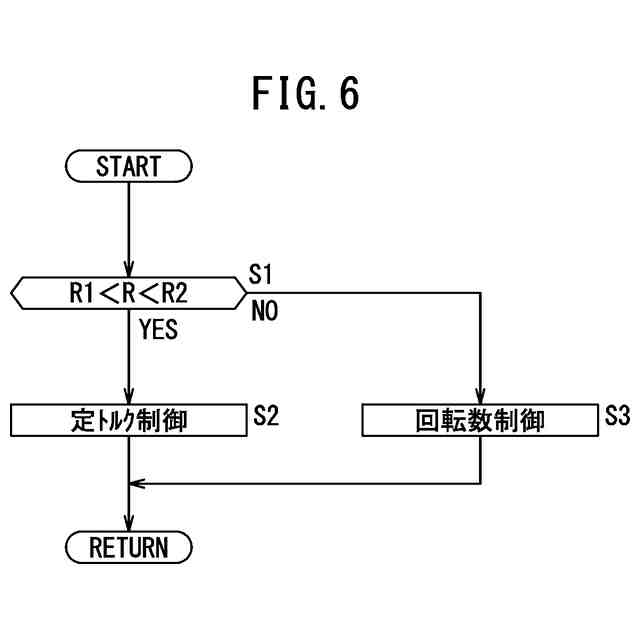
前記判定部は、前記ロータ回転数が前記ロータに共振が発生する回転数域である共振回転数域内にある場合に、前記定トルク制御を実行すると判定し、前記ロータ回転数が前記共振回転数域外にある場合に、前記回転数制御を実行すると判定する、制御装置。
【請求項3】
請求項2に記載の制御装置において、
前記制御部は、前記ロータ回転数を、前記共振回転数域の上限値を超える回転数から前記共振回転数域内の回転数に低下させる場合に、前記回転数制御から前記定トルク制御への切り替えを行う、制御装置。
【請求項4】
請求項3に記載の制御装置において、
前記制御部は、前記ロータ回転数を、前記共振回転数域内の回転数から前記共振回転数域の下限値未満の回転数に低下させる場合に、前記定トルク制御から前記回転数制御への切り替えを行う、制御装置。
【請求項5】
請求項1に記載の制御装置において、
前記目標値は、ゼロである、制御装置。
【請求項6】
請求項2に記載の制御装置において、
前記制御部は、前記ロータ回転数を、前記共振回転数域の下限値未満の回転数から前記共振回転数域内の回転数に増加させる場合に、前記回転数制御から前記定トルク制御への切り替えを行う、制御装置。
【請求項7】
請求項6に記載の制御装置において、
前記制御部は、前記ロータ回転数を、前記共振回転数域内の回転数から前記共振回転数域の上限値を超える回転数に増加させる場合に、前記定トルク制御から前記回転数制御への切り替えを行う、制御装置。
【請求項8】
請求項1に記載の制御装置において、
前記目標値は、前記ロータに共振が発生する共振回転数域の上限値よりも大きい、制御装置。
【請求項9】
請求項1~8のいずれか1項に記載の制御装置を備える飛行体。
【請求項10】
ロータを回転させる電動モータを制御する制御方法であって、
前記ロータの回転数であるロータ回転数を目標値に近づけるように前記電動モータを制御する回転数制御と、前記ロータ回転数にかかわらず一定トルクで前記電動モータを制御する定トルク制御とのうちのいずれを実行するかを、前記ロータ回転数に基づいて判定する判定ステップと、
前記判定ステップの判定結果に基づいて、前記回転数制御と前記定トルク制御とのいずれか一方を実行する制御ステップと、
を備える、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、制御方法及び飛行体に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
近年、より多くの人々が手ごろで信頼でき、持続可能且つ先進的なエネルギーへのアクセスを確保するため、エネルギーの効率化に貢献する電動化技術に関する研究開発が行われている。
【0003】
特許文献1には、電動モータによりロータを回転させて飛行する電動回転翼航空機が開示される。この航空機の制御装置は、電動モータの回転数が設定された回転数となるようにフィードバック制御を行う。
【先行技術文献】
【特許文献】
【0004】
特開2022-70146号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ロータの制御を適切に行うことが望まれる。
【0006】
本発明は、上述した課題を解決することを目的とする。
【課題を解決するための手段】
【0007】
本開示の第1の態様は、ロータを回転させる電動モータを制御する制御装置であって、前記ロータの回転数であるロータ回転数を目標値に近づけるように前記電動モータを制御する回転数制御と、前記ロータ回転数にかかわらず一定トルクで前記電動モータを制御する定トルク制御とのうちのいずれを実行するかを、前記ロータ回転数に基づいて判定する判定部と、前記判定部の判定結果に基づいて、前記回転数制御と前記定トルク制御とのいずれか一方を実行する制御部と、を備える、制御装置である。
【0008】
本開示の第2の態様は、第1の態様による制御装置を備える飛行体である。
【0009】
本開示の第3の態様は、ロータを回転させる電動モータを制御する制御方法であって、前記ロータの回転数であるロータ回転数を目標値に近づけるように前記電動モータを制御する回転数制御と、前記ロータ回転数にかかわらず一定トルクで前記電動モータを制御する定トルク制御とのうちのいずれを実行するかを、前記ロータ回転数に基づいて判定する判定ステップと、前記判定ステップの判定結果に基づいて、前記回転数制御と前記定トルク制御とのいずれか一方を実行する制御ステップと、を備える、制御方法である。
【発明の効果】
【0010】
本発明によれば、ロータの制御を適切に行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
28日前
本田技研工業株式会社
電動船外機
1か月前
本田技研工業株式会社
差圧式電解装置
22日前
本田技研工業株式会社
電池モジュール
1か月前
本田技研工業株式会社
電池モジュール
1か月前
本田技研工業株式会社
駆動装置ユニット
25日前
本田技研工業株式会社
スポット溶接方法
8日前
本田技研工業株式会社
電動無段変速装置
24日前
本田技研工業株式会社
回転電機のロータ
21日前
本田技研工業株式会社
再生正極の製造方法
1か月前
本田技研工業株式会社
二酸化炭素回収装置
1か月前
本田技研工業株式会社
制御装置、および、制御方法
8日前
本田技研工業株式会社
情報処理方法及びプログラム
7日前
本田技研工業株式会社
電気化学式水素昇圧システム
1か月前
本田技研工業株式会社
給電システムおよび給電方法
1か月前
本田技研工業株式会社
負極、固体電池及び積層体の製造方法
29日前
本田技研工業株式会社
正極、固体電池及び固体電池の製造方法
29日前
本田技研工業株式会社
二酸化炭素回収装置及び二酸化炭素回収方法
29日前
本田技研工業株式会社
リチウム金属二次電池及びそのエージング方法
1か月前
本田技研工業株式会社
情報処理装置、情報処理方法、およびプログラム
7日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
2日前
本田技研工業株式会社
作動装置
7日前
本田技研工業株式会社
制御装置
9日前
本田技研工業株式会社
学習装置、推定装置、学習方法、推定方法及びプログラム
28日前
本田技研工業株式会社
車両、制御方法、プログラム、記憶媒体、及び情報処理装置
7日前
本田技研工業株式会社
移動体支援装置および移動体システム
22日前
本田技研工業株式会社
移動体制御システム、情報処理装置、移動体制御システムのための方法、機械学習モデルを生成する方法
1か月前
個人
ドローン
8か月前
個人
人工台風
3か月前
個人
着火ドローン
5か月前
個人
救難消防飛行艇
5か月前
個人
AERO JET
24日前
個人
ドローンシステム
9か月前
東レ株式会社
中空回転翼
4か月前
個人
無人空中移動体
1か月前
個人
飛行自動車vol.2
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ