TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025144812
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024044671
出願日
2024-03-21
発明の名称
運転支援装置
出願人
株式会社アイシン
代理人
弁理士法人ネクスト
主分類
G08G
1/16 20060101AFI20250926BHJP(信号)
要約
【課題】近距離検知状態の維持を必要に応じて制限した運転支援装置を提供する。
【解決手段】反射波の受信を検知できない距離に対象物が接近した状態において、探査波を送信した後に超音波センサ9A~9Lにおいて生じる残響の継続時間が基準値より長い閾値以上となったことを条件に、車両に対して対象物が近接した位置にあることを検出し、更にその後に残響の継続時間が閾値未満となった場合であっても、反射波の受信を検知し且つその反射波を検知するまでの時間が残響の継続時間の基準値の2倍よりも短い場合には、継続して車両に対して対象物が近接した位置にあるとして、車両に対して対象物が近接した位置にあることを検出した近距離検知状態を維持するが、所定条件を満たした状態については上記近距離検知状態の維持を制限するように構成する。
【選択図】図8
特許請求の範囲
【請求項1】
車両に設置され、車両の周囲に対して探査波を送信するとともに前記探査波が車両の周囲にある対象物によって反射した反射波を受信することで前記対象物を検出する超音波センサと、
前記探査波を送信してから前記反射波の受信を検知するまでの時間に基づいて前記対象物までの距離を検出する通常距離検出手段と、
前記反射波の受信を検知できない距離に前記対象物が接近した状態において、前記探査波を送信した後に前記超音波センサにおいて生じる残響の継続時間が基準値より長い閾値以上となったことを条件に、前記車両に対して前記対象物が近接した位置にあることを検出する近距離検出手段と、
前記近距離検出手段により前記対象物が近接した位置にあることを検出した後に前記残響の継続時間が閾値未満となった場合であっても、反射波の受信を検知し且つその反射波を検知するまでの時間が残響の継続時間の基準値の2倍よりも短い場合には、継続して前記車両に対して前記対象物が近接した位置にあるとして、前記車両に対して前記対象物が近接した位置にあることを検出した近距離検知状態を維持する状態維持手段と、
所定条件を満たした状態では前記状態維持手段による前記近距離検知状態の維持を制限する検出制限手段と、を有する運転支援装置。
続きを表示(約 640 文字)
【請求項2】
前記車両は自動運転支援により走行可能な車両であって、
前記所定条件は、自動運転支援による走行を開始する前の前記車両が停車中の状態、或いは乗員が自動運転支援による走行を行うことを指示した後で走行を開始する前のスタンバイ状態にあることであって、
前記検出制限手段は、前記所定条件を満たした状態では前記近距離検知状態を維持せずに解除する請求項1に記載の運転支援装置。
【請求項3】
前記車両は自動運転支援により走行可能な車両であって、
前記所定条件は、自動運転支援による走行を開始した後で前記車両が停車中の状態、或いは自動運転支援による走行を開始した後であって乗員の指示により自動運転支援による走行を一時的に中断した状態にあることであって、
前記検出制限手段は、前記所定条件を満たした状態では前記所定条件を満たす前から前記状態維持手段により維持されている前記近距離検知状態は維持する一方で、前記所定条件を満たした後に新たに検出された対象物を契機とした前記近距離検知状態は維持せずに解除する請求項1に記載の運転支援装置。
【請求項4】
前記車両は自動運転支援により走行可能な車両であって、
前記近距離検出手段により前記対象物が近接した位置にあることを検出されてから前記近距離検知状態が維持される間において、自動運転支援による走行が中止される請求項1乃至請求項3のいずれかに記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転支援を行う運転支援装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来より車両の走行時や駐車時において安全を確保する為の安全装置として、車両に対して超音波センサ、ミリ波レーダセンサ、LiDARセンサ等の周囲の対象物(例えば人、自転車、他車両、壁など)を検出する為の検出センサを配置し、検出センサの検出結果に基づいて運転者に警告を行ったり車両の自動制御を行う技術について知られている。
【0003】
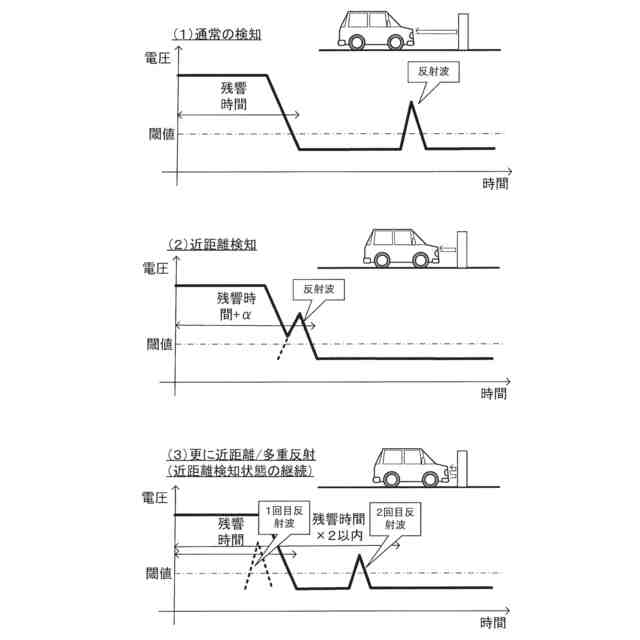
このような検出センサは、例えば超音波、ミリ波、赤外線等の探査波を出力するとともに出力した探査波が対象物に反射して戻ってくるまでの時間を計測し、対象物までの距離を検出する。ここで、特に超音波センサに関しては探査波を送信した直後に生じる探査波の残響(振動子の減衰振動)の影響により、ごく近い距離にある対象物については残響に反射波が埋もれてしまい検出することが難しい問題があった。また、検知範囲を広げるためにはより長く振動子を振動させる必要があることから残響時間が長くなり、結果的に近い距離の対象物がより検出し難くなる。そこで、特許第6311516号公報には反射波を受信できなくとも探査波を送信した直後の残響時間が通常より長くなった場合には、車両に対して近距離に対象物が存在すると検出する技術について開示されている。但し、上記残響時間の伸びは対象物が更に接近すると反射波が残響に完全に埋もれてしまい消失することとなる。そこで、対象物が車両に対して更に接近することで残響時間の伸びが消失した状態でも対象物が検出した状態(以下、近距離検知状態という)を維持するために、多重反射による2回目の反射と予想される反射波を受信した場合については、残響時間の伸びが無くなっても近距離検知状態を維持する技術についても提案されている。
【先行技術文献】
【特許文献】
【0004】
特許第6311516号公報(段落0034-0062)
【発明の概要】
【発明が解決しようとする課題】
【0005】
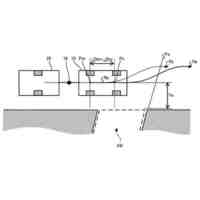
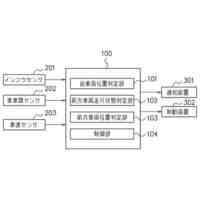
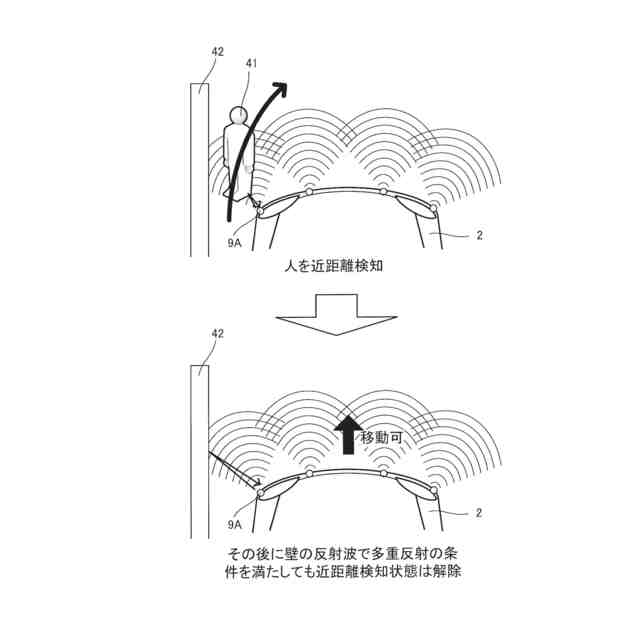
しかしながら、上記特許文献1の技術では例えば以下のようなケースにおいて問題が生じていた。例えば、図11に示すように車両100に設置された超音波センサ101に対して比較的近い距離(例えば60cm以内)に壁102がある状態において、人103が超音波センサ101と壁102の間(即ち超音波センサ101の目前)を横切ると、超音波センサ101から人103までの距離がごく近距離であることから残響時間の伸びが生じ、近距離検知状態となる。その後、人103が車両100から離れれば本来であれば近距離検知状態は解除されるべきであるが、壁102からの反射波が接近した人103の多重反射による2回目の反射波と誤認され、即ち人103が超音波センサ101の目前に継続して存在すると誤認され、近距離検知状態が維持されてしまう問題があった。車両100から壁102までの距離はそこまで近いものではなく、本来であれば車両100の移動に何ら問題ないにもかかわらず近距離検知状態が維持されてしまうと、自動運転支援が開始できない、車両の移動が行えない等の問題が生じる。
【0006】
本発明は前記従来における問題点を解消するためになされたものであり、近距離検知状態の維持を必要に応じて制限した運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記目的を達成するため本発明に係る運転支援装置は、車両に設置され、車両の周囲に対して探査波を送信するとともに前記探査波が車両の周囲にある対象物によって反射した反射波を受信することで前記対象物を検出する超音波センサと、前記探査波を送信してから前記反射波の受信を検知するまでの時間に基づいて前記対象物までの距離を検出する通常距離検出手段と、前記反射波の受信を検知できない距離に前記対象物が接近した状態において、前記探査波を送信した後に前記超音波センサにおいて生じる残響の継続時間が基準値より長い閾値以上となったことを条件に、前記車両に対して前記対象物が近接した位置にあることを検出する近距離検出手段と、前記近距離検出手段により前記対象物が近接した位置にあることを検出した後に前記残響の継続時間が閾値未満となった場合であっても、反射波の受信を検知し且つその反射波を検知するまでの時間が残響の継続時間の基準値の2倍よりも短い場合には、継続して前記車両に対して前記対象物が近接した位置にあるとして、前記車両に対して前記対象物が近接した位置にあることを検出した近距離検知状態を維持する状態維持手段と、所定条件を満たした状態では前記状態維持手段による前記近距離検知状態の維持を制限する検出制限手段と、を有する。
【発明の効果】
【0008】
前記構成を有する本発明に係る運転支援装置によれば、近距離検知状態の維持を必要に応じて制限することで、近距離に検知された対象物が存在しなくなった状態においても近距離検知状態が維持される不具合を防止することが可能となる。
【図面の簡単な説明】
【0009】
本実施形態に係る車両の概略構成図である。
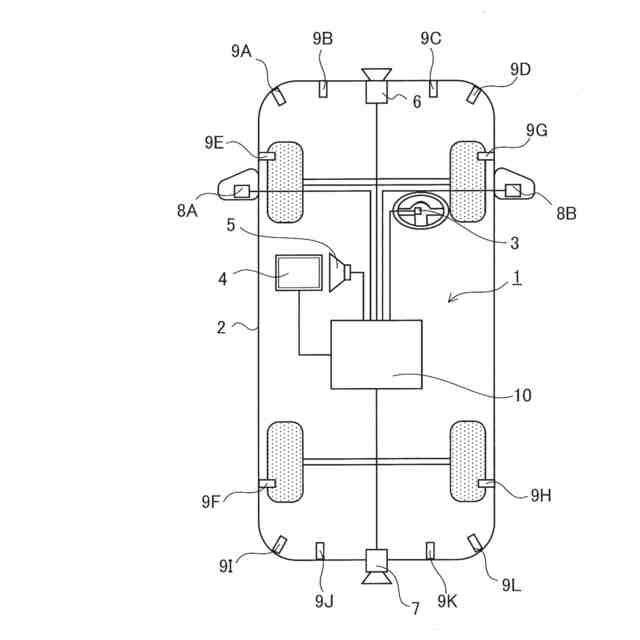
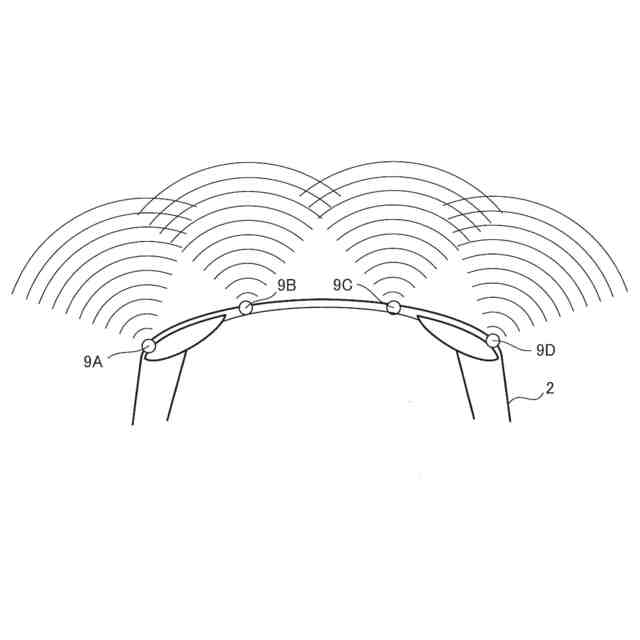
車両の前面に対する超音波センサの配置例を示した図である。
車両の側面に対する超音波センサの配置例を示した図である。
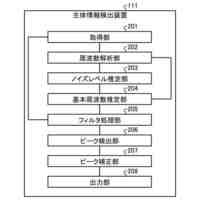
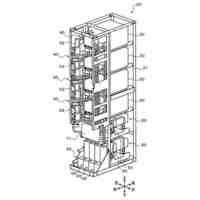
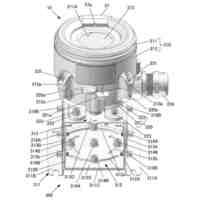
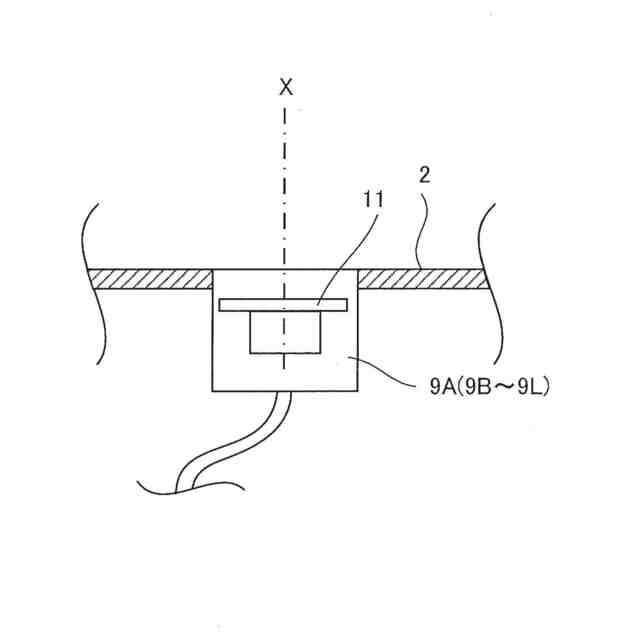
超音波センサの構成を示した図である。
超音波センサによる対象物の検知方法について説明した図である。
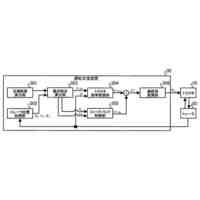
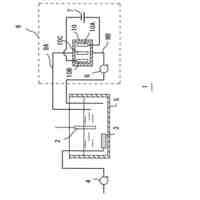
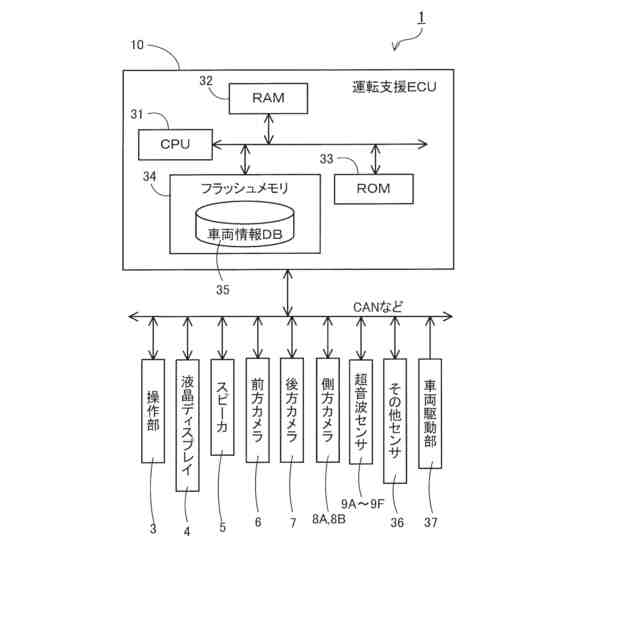
本実施形態に係る運転支援装置の構成を示したブロック図である。
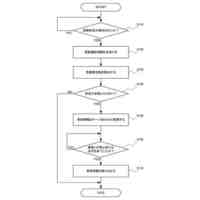
本実施形態に係る対象物検知処理プログラムのフローチャートである。
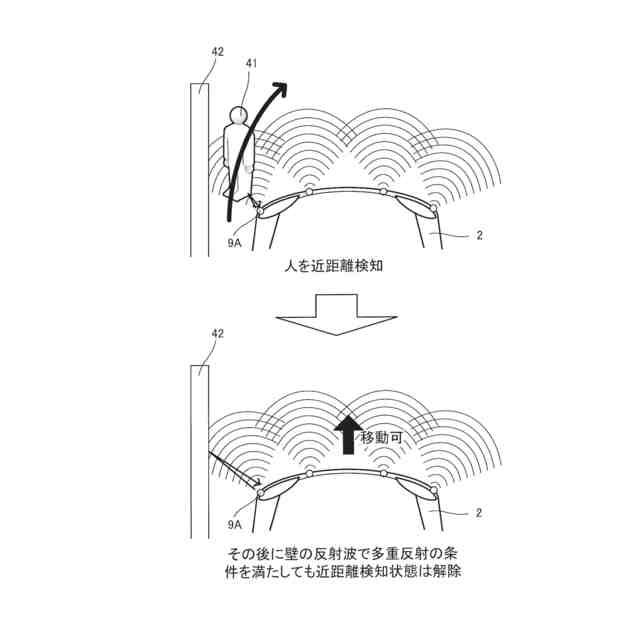
近距離検知状態の維持を解除する例について説明した図である。
近距離検知状態を維持する例について説明した図である。
近距離検知状態の維持を解除する例について説明した図である。
従来技術の問題点について説明した図である。
【発明を実施するための形態】
【0010】
以下、本発明に係る運転支援装置について具体化した一実施形態について図面を参照しつつ詳細に説明する。先ず、本実施形態に係る運転支援装置1を搭載した車両2について以下説明する。図1は本実施形態に係る車両2の概略構成図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ロータ
18日前
株式会社アイシン
ロータ
22日前
株式会社アイシン
歯車機構
18日前
株式会社アイシン
折り畳み装置
22日前
株式会社アイシン
ガス検出装置
22日前
株式会社アイシン
車両制御装置
22日前
株式会社アイシン
折り畳み装置
22日前
株式会社アイシン
牽引支援装置
22日前
株式会社アイシン
牽引支援装置
22日前
株式会社アイシン
折り畳み装置
22日前
株式会社アイシン
運転支援装置
22日前
株式会社アイシン
環境認識装置
22日前
株式会社アイシン
折り畳み装置
22日前
株式会社アイシン
走行制御装置
22日前
株式会社アイシン
ドアロック装置
16日前
株式会社アイシン
サンルーフ装置
18日前
株式会社アイシン
生体情報検出装置
22日前
株式会社アイシン
露光制御システム
22日前
株式会社アイシン
燃料電池システム
18日前
株式会社アイシン
燃料電池システム
18日前
株式会社アイシン
燃料電池システム
18日前
株式会社アイシン
被牽引車両用マークおよびマーク検出装置
22日前
株式会社豊田中央研究所
非接触給電可能な回転電機
16日前
株式会社アイシン
ホール輸送材料およびホール輸送材料を用いた太陽電池
2日前
株式会社アイシン
ホール輸送材料およびホール輸送材料を用いた太陽電池
4日前
株式会社アイシン
ペロブスカイト太陽電池及びペロブスカイト太陽電池の製造方法
8日前
株式会社豊田中央研究所
体重推定装置、体重推定方法、及び体重推定プログラム
17日前
ミクロエース株式会社
被覆銅材の剥離処理方法、処理装置、処理装置制御部およびプログラム
2日前
日本精機株式会社
警報システム
2か月前
株式会社SUBARU
車両
23日前
個人
自動電動車椅子
1か月前
エムケー精工株式会社
車両誘導装置
2か月前
スズキ株式会社
運転支援装置
2か月前
ニッタン株式会社
検知器
1か月前
株式会社国際電気
防災システム
2か月前
ニッタン株式会社
発信機
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ