TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141996
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2025115256,2024062715
出願日
2025-07-08,2021-11-25
発明の名称
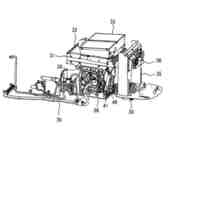
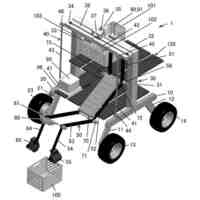
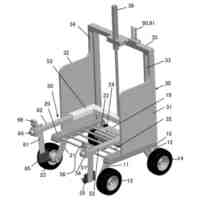
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250919BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】車体の操舵にともなうユーザーの負担の軽減が必ずしも十分に実現されていない。
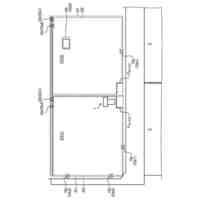
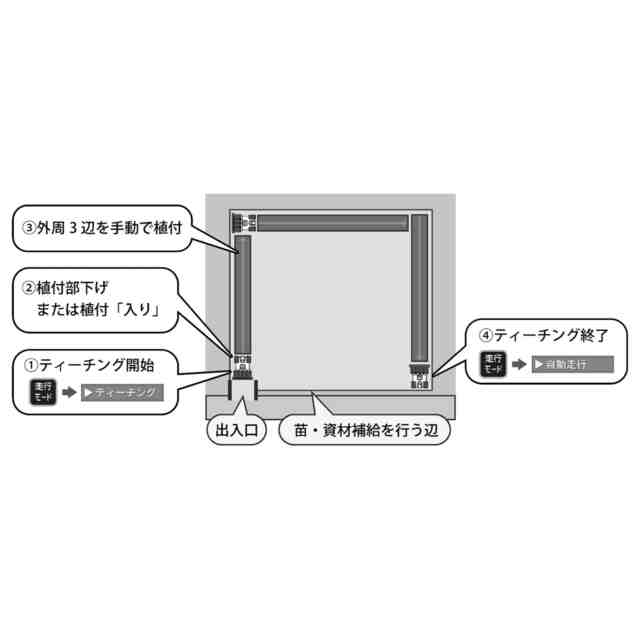
【解決手段】航法衛星を用いて走行機体の位置を検出可能な衛星測位ユニットと、圃場に対する作業が可能な圃場作業機を備え、自動走行する作業車両であって、農用資材を車両へ補給する作業を行うための畦に相当する補給辺を有し、補給辺以外を圃場作業機により農用資材が圃場へ供給される供給状態で手動走行する自動走行のティーチング方法、または補給辺以外を圃場作業機により農用資材が圃場へ供給される供給状態で手動走行するのと補給辺を圃場作業機により農用資材が圃場へ供給されない停止状態で手動走行する自動走行のティーチング方法を備え、ティーチング方法により手動走行した経路より圃場内側に自動走行経路が生成されることを特徴とする。
【選択図】 図9
特許請求の範囲
【請求項1】
航法衛星を用いて走行機体の位置を検出可能な衛星測位ユニットと、
圃場に対する作業が可能な圃場作業機を備え、
自動走行する作業車両であって、
前記農用資材を車両へ補給する作業を行うための畦に相当する補給辺を有し、
前記補給辺以外を前記圃場作業機により前記農用資材が前記圃場へ供給される供給状態で手動走行する自動走行のティーチング方法、または前記補給辺以外を前記圃場作業機により前記農用資材が前記圃場へ供給される供給状態で手動走行するのと前記補給辺を前記圃場作業機により前記農用資材が前記圃場へ供給されない停止状態で手動走行する自動走行のティーチング方法を備え、
前記ティーチング方法により手動走行した経路より圃場内側に自動走行経路が生成されることを特徴とする作業車両。
続きを表示(約 180 文字)
【請求項2】
前記ティーチング方法により生成された自動走行経路は、
前記補給辺と前記補給辺の対辺に相当する畦を往復する往復経路を備えていることを特徴とする請求項1に記載の作業車両。
【請求項3】
生成された前記自動走行経路の自動走行が完了後、前記補給辺を前記供給状態で手動走行することを特徴とする請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
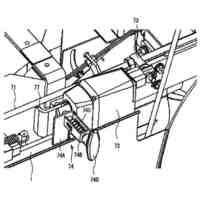
本発明は、田植え機などのような作業車両に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
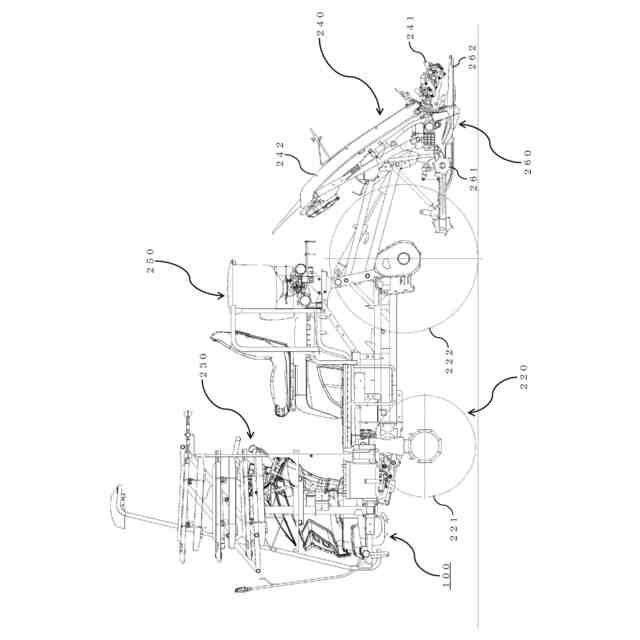
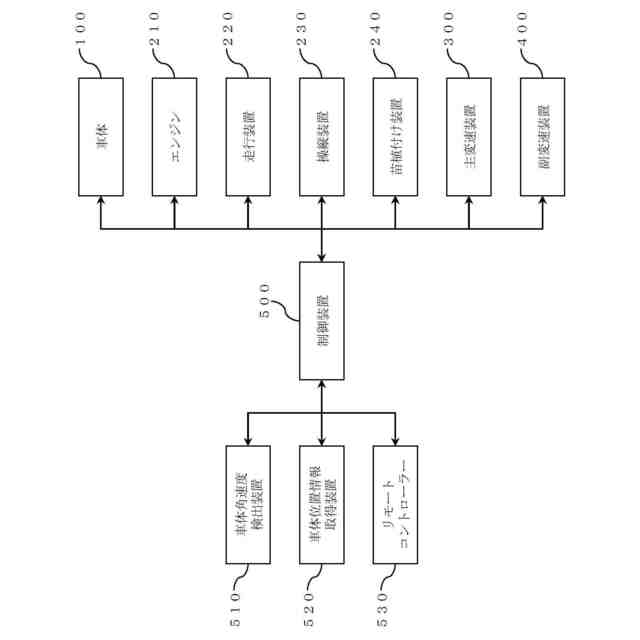
車体へ昇降可能に取付けられた苗植付け装置と、ステアリングハンドルを駆動するステアリングモーターと、ステアリングモーターにステアリングハンドルを駆動させることにより、車体の直進制御を行う制御装置と、を有する、田植え機などのような作業車両が、知られている(たとえば、特許文献1および2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-24541号公報
特開2002-335720号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、さまざまな観点からユーザーの負担を軽減することが重要であると考えている。
【0005】
しかしながら、上述された従来の田植え機などのような作業車両については、自動走行にともなうユーザーの負担の軽減が必ずしも十分に実現されていない。
【0006】
本発明は、上述された従来の課題を考慮し、自動走行にともなうユーザーの負担を軽減することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
第1の本発明は、航法衛星を用いて走行機体の位置を検出可能な衛星測位ユニットと、
圃場に対する作業が可能な圃場作業機を備え、
自動走行する作業車両であって、
前記農用資材を車両へ補給する作業を行うための畦に相当する補給辺を有し、
前記補給辺以外を前記圃場作業機により前記農用資材が前記圃場へ供給される供給状態で手動走行する自動走行のティーチング方法、または前記補給辺以外を前記圃場作業機により前記農用資材が前記圃場へ供給される供給状態で手動走行するのと前記補給辺を前記圃場作業機により前記農用資材が前記圃場へ供給されない停止状態で手動走行する自動走行のティーチング方法を備え、
前記ティーチング方法により手動走行した経路より圃場内側に自動走行経路が生成されることを特徴とする作業車両である。
【0008】
第2の本発明は、前記ティーチング方法により生成された自動走行経路は、
前記補給辺と前記補給辺の対辺に相当する畦を往復する往復経路を備えていることを特徴とする第1の本発明の作業車両である。
【0009】
第3の本発明は、生成された前記自動走行経路の自動走行が完了後、前記補給辺を前記供給状態で手動走行することを特徴とする第1または第2の本発明の作業車両である。
【発明の効果】
【0010】
第1の本発明により、自動走行にともなうユーザーの負担を軽減することが可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
コンバイン
8日前
井関農機株式会社
歩行型耕運機
14日前
井関農機株式会社
農産物の管理システム
14日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
籾摺選別機
6日前
井関農機株式会社
籾摺選別機
6日前
個人
虫捕り器
24日前
個人
草刈り鋏
6日前
個人
蠅捕獲器
2日前
個人
刈込鋏保持具
20日前
個人
後付巻降ろし器
24日前
個人
草刈機用回転刃
2日前
個人
飼育容器
1か月前
株式会社丹勝
緑化工法
21日前
個人
イカ釣り用ヤエン
24日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
14日前
株式会社シマノ
釣竿
24日前
個人
四足動物用装着具
7日前
個人
水耕栽培システム
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ